SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis

0

Sign in to get full access
Overview
- This research paper presents SpringGrasp, an optimization pipeline for synthesizing robust and compliant pre-grasps for dexterous robotic manipulation.
- The system aims to generate stable pre-grasps that can accommodate object pose uncertainty and facilitate smooth transitions to stable grasps.
- The approach combines physics-based optimization with a novel spring-based grasp representation to enable efficient exploration of the high-dimensional grasp configuration space.
Plain English Explanation
The paper introduces SpringGrasp, a new method for helping robotic hands grab objects more reliably. When a robot tries to pick up an object, it needs to first position its fingers in a "pre-grasp" pose before closing around the object. This pre-grasp is crucial, as it sets the stage for a stable and secure final grasp.
However, achieving a good pre-grasp is challenging, as the robot has to account for uncertainty in the object's position and orientation. SpringGrasp addresses this by using an optimization-based approach that simulates the physics of the interaction between the robot hand and the object. The key innovation is a "spring-based" representation of the grasp, which allows the system to efficiently explore a large space of possible pre-grasp configurations.
The goal is to find a pre-grasp that is both robust to uncertainty and "compliant" - meaning the hand can adapt to minor variations in the object's position during the grasping process. This helps ensure a smooth transition from the pre-grasp to the final stable grasp, improving the overall reliability of the robotic manipulation task.
Technical Explanation
The paper presents SpringGrasp, a novel optimization-based pipeline for synthesizing robust and compliant pre-grasps for dexterous robotic manipulation. The approach combines physics-based optimization with a spring-based grasp representation to enable efficient exploration of the high-dimensional grasp configuration space.
The core idea is to model the interaction between the robot hand and the object using a network of virtual springs, which allows the system to efficiently simulate the compliance and stability of candidate pre-grasps. The optimization process then iteratively refines the pre-grasp configuration to maximize stability and robustness to object pose uncertainty.
The authors evaluate SpringGrasp on a range of object grasping tasks, comparing its performance to traditional optimization-based methods as well as learned grasping policies from prior work, prior work, and prior work. The results demonstrate that SpringGrasp can generate pre-grasps that are both more stable and more compliant, leading to more reliable grasping performance, especially in the presence of object pose uncertainty.
Critical Analysis
The paper presents a technically sound and well-designed optimization pipeline for pre-grasp synthesis. The spring-based grasp representation is a clever innovation that allows for efficient exploration of the high-dimensional configuration space. The authors also provide a thorough evaluation, comparing SpringGrasp to relevant prior work.
That said, the paper does not address some potential limitations of the approach. For example, the simulation-based optimization may not fully capture the complex dynamics and uncertainties present in real-world robotic manipulation tasks. There could also be challenges in scaling the approach to handle a wider variety of object geometries and material properties.
Additionally, the paper does not discuss the computational complexity of the optimization process or the online inference time required for deploying SpringGrasp in a real-time robotic control system. These practical concerns would be important to understand the feasibility of deploying the method in real-world applications.
Overall, SpringGrasp represents a promising advance in the field of dexterous robotic manipulation, but further research would be needed to fully assess its strengths, limitations, and potential for real-world impact.
Conclusion
The SpringGrasp paper presents a novel optimization-based pipeline for generating robust and compliant pre-grasps for dexterous robotic manipulation. By combining physics-based simulation with a spring-based grasp representation, the system can efficiently explore a large space of possible pre-grasp configurations to find solutions that are stable and adaptive to object pose uncertainty.
The technical evaluation demonstrates the advantages of SpringGrasp over previous approaches, particularly in terms of grasp stability and compliance. This is an important advancement, as reliable pre-grasping is a critical component of robust and versatile robotic manipulation capabilities.
While the paper does not address all potential limitations of the approach, SpringGrasp represents a significant step forward in the field of dexterous robotic grasping. Further research and real-world deployment could help unlock new possibilities for more flexible and adaptable robotic manipulation in a variety of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis
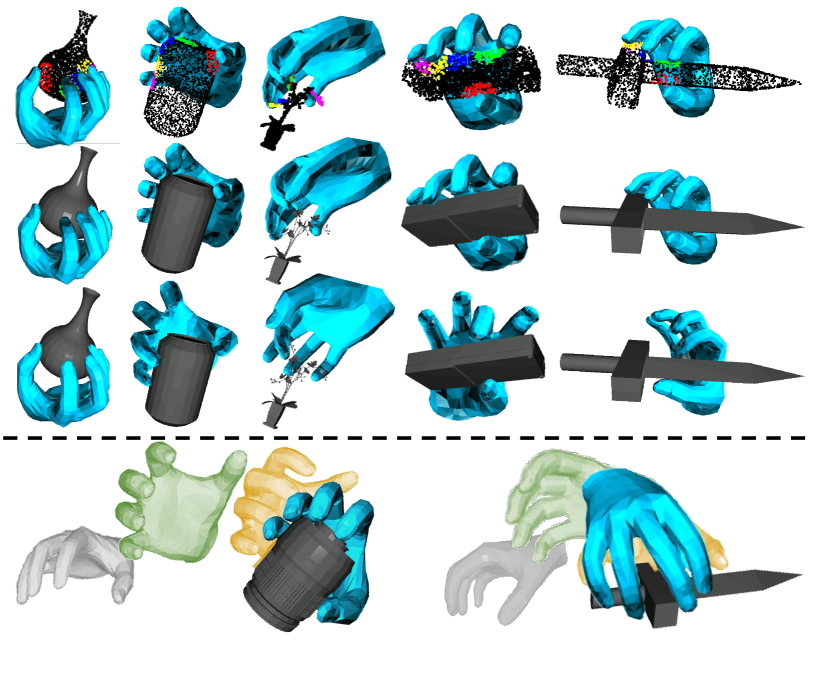
Sirui Chen, Jeannette Bohg, C. Karen Liu
Generating stable and robust grasps on arbitrary objects is critical for dexterous robotic hands, marking a significant step towards advanced dexterous manipulation. Previous studies have mostly focused on improving differentiable grasping metrics with the assumption of precisely known object geometry. However, shape uncertainty is ubiquitous due to noisy and partial shape observations, which introduce challenges in grasp planning. We propose, SpringGrasp planner, a planner that considers uncertain observations of the object surface for synthesizing compliant dexterous grasps. A compliant dexterous grasp could minimize the effect of unexpected contact with the object, leading to more stable grasp with shape-uncertain objects. We introduce an analytical and differentiable metric, SpringGrasp metric, that evaluates the dynamic behavior of the entire compliant grasping process. Planning with SpringGrasp planner, our method achieves a grasp success rate of 89% from two viewpoints and 84% from a single viewpoints in experiment with a real robot on 14 common objects. Compared with a force-closure based planner, our method achieves at least 18% higher grasp success rate.
Read more4/26/2024

0
DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning
Wenqiang Xu, Jieyi Zhang, Tutian Tang, Zhenjun Yu, Yutong Li, Cewu Lu
Grasp planning is an important task for robotic manipulation. Though it is a richly studied area, a standalone, fast, and differentiable grasp planner that can work with robot grippers of different DOFs has not been reported. In this work, we present DiPGrasp, a grasp planner that satisfies all these goals. DiPGrasp takes a force-closure geometric surface matching grasp quality metric. It adopts a gradient-based optimization scheme on the metric, which also considers parallel sampling and collision handling. This not only drastically accelerates the grasp search process over the object surface but also makes it differentiable. We apply DiPGrasp to three applications, namely grasp dataset construction, mask-conditioned planning, and pose refinement. For dataset generation, as a standalone planner, DiPGrasp has clear advantages over speed and quality compared with several classic planners. For mask-conditioned planning, it can turn a 3D perception model into a 3D grasp detection model instantly. As a pose refiner, it can optimize the coarse grasp prediction from the neural network, as well as the neural network parameters. Finally, we conduct real-world experiments with the Barrett hand and Schunk SVH 5-finger hand. Video and supplementary materials can be viewed on our website: url{https://dipgrasp.robotflow.ai}.
Read more8/12/2024
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024

0
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
Hui Zhang, Sammy Christen, Zicong Fan, Otmar Hilliges, Jie Song
Human hands possess the dexterity to interact with diverse objects such as grasping specific parts of the objects and/or approaching them from desired directions. More importantly, humans can grasp objects of any shape without object-specific skills. Recent works synthesize grasping motions following single objectives such as a desired approach heading direction or a grasping area. Moreover, they usually rely on expensive 3D hand-object data during training and inference, which limits their capability to synthesize grasping motions for unseen objects at scale. In this paper, we unify the generation of hand-object grasping motions across multiple motion objectives, diverse object shapes and dexterous hand morphologies in a policy learning framework GraspXL. The objectives are composed of the graspable area, heading direction during approach, wrist rotation, and hand position. Without requiring any 3D hand-object interaction data, our policy trained with 58 objects can robustly synthesize diverse grasping motions for more than 500k unseen objects with a success rate of 82.2%. At the same time, the policy adheres to objectives, which enables the generation of diverse grasps per object. Moreover, we show that our framework can be deployed to different dexterous hands and work with reconstructed or generated objects. We quantitatively and qualitatively evaluate our method to show the efficacy of our approach. Our model, code, and the large-scale generated motions are available at https://eth-ait.github.io/graspxl/.
Read more7/15/2024