Diverse Randomized Value Functions: A Provably Pessimistic Approach for Offline Reinforcement Learning
2404.06188
0
0

Abstract
Offline Reinforcement Learning (RL) faces distributional shift and unreliable value estimation, especially for out-of-distribution (OOD) actions. To address this, existing uncertainty-based methods penalize the value function with uncertainty quantification and demand numerous ensemble networks, posing computational challenges and suboptimal outcomes. In this paper, we introduce a novel strategy employing diverse randomized value functions to estimate the posterior distribution of $Q$-values. It provides robust uncertainty quantification and estimates lower confidence bounds (LCB) of $Q$-values. By applying moderate value penalties for OOD actions, our method fosters a provably pessimistic approach. We also emphasize on diversity within randomized value functions and enhance efficiency by introducing a diversity regularization method, reducing the requisite number of networks. These modules lead to reliable value estimation and efficient policy learning from offline data. Theoretical analysis shows that our method recovers the provably efficient LCB-penalty under linear MDP assumptions. Extensive empirical results also demonstrate that our proposed method significantly outperforms baseline methods in terms of performance and parametric efficiency.
Create account to get full access
Overview
- This paper proposes a novel approach called "Diverse Randomized Value Functions" (DRVF) for offline reinforcement learning, which aims to learn a risk-averse and pessimistic value function.
- The key idea is to train multiple value function heads that collectively capture the diversity of possible value estimates, allowing the agent to act conservatively and avoid high-risk actions.
- The authors provide a theoretical analysis to show that DRVF can achieve near-optimal performance in offline settings, even when the data distribution is non-stationary or adversarially corrupted.
Plain English Explanation
The paper introduces a new method called "Diverse Randomized Value Functions" (DRVF) for offline reinforcement learning. Reinforcement learning is a way for AI systems to learn how to make decisions by interacting with an environment and receiving rewards or punishments.
In offline reinforcement learning, the AI system doesn't get to interact with the environment directly. Instead, it has to learn from a fixed dataset of past experiences. This can be challenging because the dataset may not capture all the possible situations the AI might encounter.
The key idea behind DRVF is to train multiple "value function heads" - essentially, different ways of estimating the expected future rewards for each possible action. By having this diversity of value estimates, the AI can act in a more cautious and risk-averse way, avoiding actions that might lead to high-risk or unexpected outcomes.
The authors show that this approach can perform well even in challenging offline settings, such as when the data distribution changes over time or is deliberately corrupted to try to mislead the AI. This makes DRVF a promising approach for real-world applications where we want AI systems to be robust and reliable, even when they can't directly interact with the environment.
Technical Explanation
The paper introduces a novel approach called "Diverse Randomized Value Functions" (DRVF) for offline reinforcement learning. The core idea is to train multiple value function heads, each of which provides a different estimate of the expected future rewards for each possible action.
Formally, the authors consider an episodic Markov Decision Process (MDP) setting, where the agent has to learn a policy from a fixed dataset of past experiences, without the ability to interact with the environment directly. To address the challenges of this offline setting, the DRVF approach trains a set of value function heads, each of which is initialized with different random weights.
During training, the authors propose a "pessimistic" objective that encourages the value function heads to collectively capture the diversity of possible value estimates. This allows the agent to act in a risk-averse manner, avoiding high-risk actions that might lead to unexpected or undesirable outcomes.
The authors provide a theoretical analysis to show that DRVF can achieve near-optimal performance in offline settings, even when the data distribution is non-stationary or adversarially corrupted. This makes DRVF a promising approach for real-world applications where we want AI systems to be robust and reliable, without the ability to directly interact with the environment.
Critical Analysis
The paper presents a thoughtful and well-designed approach to offline reinforcement learning, with a strong theoretical foundation and promising experimental results. However, there are a few potential limitations and areas for further research:
-
Scalability: While the authors demonstrate the effectiveness of DRVF on relatively small-scale environments, it's unclear how the approach would scale to more complex, high-dimensional tasks. The computational overhead of training multiple value function heads may become a bottleneck as the problem size increases.
-
Hyperparameter Tuning: The performance of DRVF seems to be sensitive to the choice of hyperparameters, such as the number of value function heads and the specific optimization objectives used. Careful hyperparameter tuning may be required to achieve optimal results in different domains.
-
Interpretability: The use of multiple value function heads could make the decision-making process of the DRVF agent less interpretable, compared to a single, monolithic value function. This could be a concern in applications where transparency and explainability are important.
-
Generalization: The paper focuses on the offline setting, where the agent has to learn from a fixed dataset. It would be interesting to see how DRVF could be extended to handle more dynamic, online settings, where the agent may have the opportunity to interact with the environment and gather new data over time.
Overall, the DRVF approach is a promising step forward in the field of offline reinforcement learning, with the potential to improve the robustness and reliability of AI systems in real-world applications. Further research into addressing the aforementioned limitations could help unlock the full potential of this approach.
Conclusion
The "Diverse Randomized Value Functions" (DRVF) method proposed in this paper is a novel and compelling approach to offline reinforcement learning. By training multiple value function heads that collectively capture the diversity of possible value estimates, the DRVF agent can act in a risk-averse and pessimistic manner, avoiding high-risk actions that might lead to undesirable outcomes.
The authors' theoretical analysis and experimental results demonstrate the effectiveness of DRVF, even in challenging offline settings with non-stationary or adversarially corrupted data distributions. This makes DRVF a promising technique for real-world applications where we want AI systems to be robust and reliable, without the ability to directly interact with the environment.
While the paper highlights some potential limitations, such as scalability and interpretability concerns, the DRVF approach represents an important step forward in the field of offline reinforcement learning. As researchers continue to build upon this work, we can expect to see more advanced and reliable AI systems that can learn from limited historical data and make safe, risk-aware decisions in complex, uncertain environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Strategically Conservative Q-Learning
Yutaka Shimizu, Joey Hong, Sergey Levine, Masayoshi Tomizuka
0
0
Offline reinforcement learning (RL) is a compelling paradigm to extend RL's practical utility by leveraging pre-collected, static datasets, thereby avoiding the limitations associated with collecting online interactions. The major difficulty in offline RL is mitigating the impact of approximation errors when encountering out-of-distribution (OOD) actions; doing so ineffectively will lead to policies that prefer OOD actions, which can lead to unexpected and potentially catastrophic results. Despite the variety of works proposed to address this issue, they tend to excessively suppress the value function in and around OOD regions, resulting in overly pessimistic value estimates. In this paper, we propose a novel framework called Strategically Conservative Q-Learning (SCQ) that distinguishes between OOD data that is easy and hard to estimate, ultimately resulting in less conservative value estimates. Our approach exploits the inherent strengths of neural networks to interpolate, while carefully navigating their limitations in extrapolation, to obtain pessimistic yet still property calibrated value estimates. Theoretical analysis also shows that the value function learned by SCQ is still conservative, but potentially much less so than that of Conservative Q-learning (CQL). Finally, extensive evaluation on the D4RL benchmark tasks shows our proposed method outperforms state-of-the-art methods. Our code is available through url{https://github.com/purewater0901/SCQ}.
6/10/2024
🏅
Exclusively Penalized Q-learning for Offline Reinforcement Learning
Junghyuk Yeom, Yonghyeon Jo, Jungmo Kim, Sanghyeon Lee, Seungyul Han
0
0
Constraint-based offline reinforcement learning (RL) involves policy constraints or imposing penalties on the value function to mitigate overestimation errors caused by distributional shift. This paper focuses on a limitation in existing offline RL methods with penalized value function, indicating the potential for underestimation bias due to unnecessary bias introduced in the value function. To address this concern, we propose Exclusively Penalized Q-learning (EPQ), which reduces estimation bias in the value function by selectively penalizing states that are prone to inducing estimation errors. Numerical results show that our method significantly reduces underestimation bias and improves performance in various offline control tasks compared to other offline RL methods
5/24/2024
Value-Incentivized Preference Optimization: A Unified Approach to Online and Offline RLHF
Shicong Cen, Jincheng Mei, Katayoon Goshvadi, Hanjun Dai, Tong Yang, Sherry Yang, Dale Schuurmans, Yuejie Chi, Bo Dai
0
0
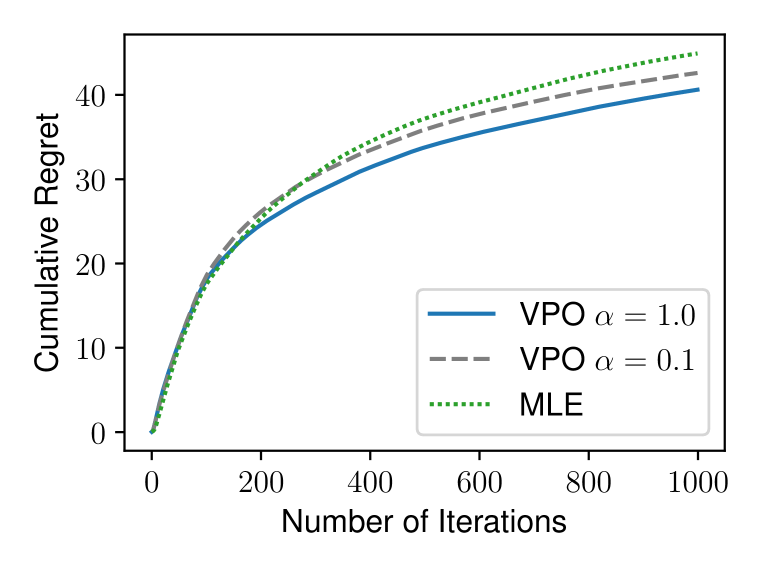
Reinforcement learning from human feedback (RLHF) has demonstrated great promise in aligning large language models (LLMs) with human preference. Depending on the availability of preference data, both online and offline RLHF are active areas of investigation. A key bottleneck is understanding how to incorporate uncertainty estimation in the reward function learned from the preference data for RLHF, regardless of how the preference data is collected. While the principles of optimism or pessimism under uncertainty are well-established in standard reinforcement learning (RL), a practically-implementable and theoretically-grounded form amenable to large language models is not yet available, as standard techniques for constructing confidence intervals become intractable under arbitrary policy parameterizations. In this paper, we introduce a unified approach to online and offline RLHF -- value-incentivized preference optimization (VPO) -- which regularizes the maximum-likelihood estimate of the reward function with the corresponding value function, modulated by a $textit{sign}$ to indicate whether the optimism or pessimism is chosen. VPO also directly optimizes the policy with implicit reward modeling, and therefore shares a simpler RLHF pipeline similar to direct preference optimization. Theoretical guarantees of VPO are provided for both online and offline settings, matching the rates of their standard RL counterparts. Moreover, experiments on text summarization and dialog verify the practicality and effectiveness of VPO.
6/6/2024

Deterministic Uncertainty Propagation for Improved Model-Based Offline Reinforcement Learning
Abdullah Akgul, Manuel Hau{ss}mann, Melih Kandemir
0
0
Current approaches to model-based offline Reinforcement Learning (RL) often incorporate uncertainty-based reward penalization to address the distributional shift problem. While these approaches have achieved some success, we argue that this penalization introduces excessive conservatism, potentially resulting in suboptimal policies through underestimation. We identify as an important cause of over-penalization the lack of a reliable uncertainty estimator capable of propagating uncertainties in the Bellman operator. The common approach to calculating the penalty term relies on sampling-based uncertainty estimation, resulting in high variance. To address this challenge, we propose a novel method termed Moment Matching Offline Model-Based Policy Optimization (MOMBO). MOMBO learns a Q-function using moment matching, which allows us to deterministically propagate uncertainties through the Q-function. We evaluate MOMBO's performance across various environments and demonstrate empirically that MOMBO is a more stable and sample-efficient approach.
6/7/2024