DMCA: Dense Multi-agent Navigation using Attention and Communication
2209.06415
0
0
👨🏫
Abstract
In decentralized multi-robot navigation, ensuring safe and efficient movement with limited environmental awareness remains a challenge. While robots traditionally navigate based on local observations, this approach falters in complex environments. A possible solution is to enhance understanding of the world through inter-agent communication, but mere information broadcasting falls short in efficiency. In this work, we address this problem by simultaneously learning decentralized multi-robot collision avoidance and selective inter-agent communication. We use a multi-head self-attention mechanism that encodes observable information from neighboring robots into a concise and fixed-length observation vector, thereby handling varying numbers of neighbors. Our method focuses on improving navigation performance through selective communication. We cast the communication selection as a link prediction problem, where the network determines the necessity of establishing a communication link with a specific neighbor based on the observable state information. The communicated information enhances the neighbor's observation and aids in selecting an appropriate navigation plan. By training the network end-to-end, we concurrently learn the optimal weights for the observation encoder, communication selection, and navigation components. We showcase the benefits of our approach by achieving safe and efficient navigation among multiple robots, even in dense and challenging environments. Comparative evaluations against various learning-based and model-based baselines demonstrate our superior navigation performance, resulting in an impressive improvement of up to 24% in success rate within complex evaluation scenarios.
Create account to get full access
Overview
- In this paper, the authors address the challenge of ensuring safe and efficient movement for decentralized multi-robot navigation in complex environments with limited environmental awareness.
- They propose a solution that combines decentralized multi-robot collision avoidance with selective inter-agent communication, using a multi-head self-attention mechanism to encode observations from neighboring robots.
- The key innovation is casting communication selection as a link prediction problem, allowing the network to determine the necessity of establishing a communication link based on the observable state information.
- This approach aims to enhance navigation performance by selectively sharing relevant information among robots, leading to safer and more efficient navigation even in dense and challenging environments.
Plain English Explanation
When multiple robots need to navigate through a complex environment, it can be difficult for them to avoid collisions and move efficiently without a complete understanding of their surroundings. The authors of this paper propose a solution that allows the robots to communicate selectively with each other, sharing only the most relevant information to improve their navigation.
Traditionally, robots rely on their own local observations to navigate, but this approach can falter in crowded or complicated environments. An alternative is to have the robots share information with each other, but simply broadcasting everything can be inefficient.
The key innovation in this paper is that the robots use a multi-head self-attention mechanism to selectively determine which information is most important to share with their neighbors. This allows them to build a more complete picture of their surroundings without overwhelming each other with unnecessary data.
By training the system end-to-end, the researchers were able to optimize the robot's ability to observe their environment, choose which information to share, and plan their navigation all at the same time. This led to safer and more efficient navigation even in dense, complex environments, outperforming other state-of-the-art approaches.
Technical Explanation
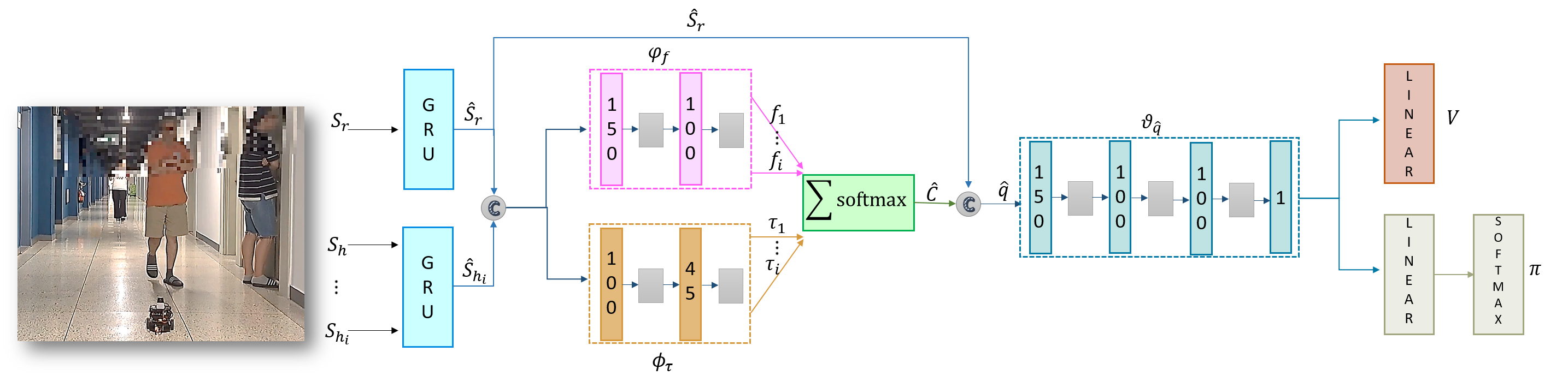
The core of the authors' approach is a multi-head self-attention mechanism that encodes observable information from neighboring robots into a concise, fixed-length observation vector. This allows the system to handle a varying number of neighbors by selectively focusing on the most relevant information.
The key innovation is that the authors cast the communication selection as a link prediction problem. The network determines the necessity of establishing a communication link with a specific neighbor based on the observable state information. This selective communication enhances each robot's understanding of its surroundings and aids in selecting an appropriate navigation plan.
By training the network end-to-end, the authors learn the optimal weights for the observation encoder, communication selection, and navigation components simultaneously. This decentralized, differentiable approach allows the system to adaptively adjust its communication and navigation strategies based on the dynamic environment.
The authors evaluate their approach against various learning-based and model-based baselines, demonstrating superior navigation performance with an impressive improvement of up to 24% in success rate within complex evaluation scenarios.
Critical Analysis
The paper presents a compelling solution to the challenging problem of decentralized multi-robot navigation in complex environments. The authors' key insight of casting communication selection as a link prediction problem is novel and appears to be an effective way to balance the need for information sharing with the efficiency of selective communication.
That said, the paper does not address several potential limitations or areas for further research. For example, the approach assumes that robots can accurately observe the state of their neighbors, which may not always be the case in real-world scenarios with occlusions or sensor noise. Additionally, the evaluation is primarily based on simulation, and it would be valuable to see how the system performs in physical robot experiments.
Another potential concern is the computational complexity of the multi-head self-attention mechanism, especially as the number of robots scales up. The authors could consider exploring ways to further optimize the network architecture or communication protocols to maintain efficiency in larger multi-robot systems.
Overall, the research presented in this paper represents a significant advancement in the field of decentralized multi-robot navigation. However, as with any promising new approach, there are opportunities for further refinement and exploration to address the remaining challenges and limitations.
Conclusion
This paper introduces a novel approach to decentralized multi-robot navigation that combines collision avoidance with selective inter-agent communication. By using a multi-head self-attention mechanism to encode relevant observations and casting communication selection as a link prediction problem, the authors have developed a system that can navigate complex environments more safely and efficiently than previous methods.
The key contributions of this work are the selective communication strategy, the end-to-end training approach, and the impressive performance improvements demonstrated in the evaluation. While there are still opportunities for further research and refinement, this paper represents a significant step forward in the field of multi-robot coordination and navigation, with potential applications in areas like search and rescue, automated warehousing, and autonomous transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
A Distributed Multi-Robot Coordination Algorithm for Navigation in Tight Environments
Roya Firoozi, Laura Ferranti, Xiaojing Zhang, Sebastian Nejadnik, Francesco Borrelli
0
0
This work presents a distributed method for multi-vehicle coordination based on nonlinear model predictive control (NMPC) and dual decomposition. Our approach allows the vehicles to coordinate in tight spaces (e.g., busy highway lanes or parking lots) by using a polytopic description of each vehicle's shape and formulating collision avoidance as a dual optimization problem. Our method accommodates heterogeneous teams of vehicles (i.e., vehicles with different polytopic shapes and dynamic models can be part of the same team). Our method allows the vehicles to share their intentions in a distributed fashion without relying on a central coordinator and efficiently provides collision-free trajectories for the vehicles. In addition, our method decouples the individual-vehicles' trajectory optimization from their collision-avoidance objectives enhancing the scalability of the method and allowing one to exploit parallel hardware architectures. All these features are particularly important for vehicular applications, where the systems operate at high-frequency rates in dynamic environments. To validate our method, we apply it in a vehicular application, that is, the autonomous lane-merging of a team of connected vehicles to form a platoon. We compare our design with the centralized NMPC design to show the computational benefits of the proposed distributed algorithm.
6/11/2024

Multi-Robot Cooperative Socially-Aware Navigation Using Multi-Agent Reinforcement Learning
Weizheng Wang, Le Mao, Ruiqi Wang, Byung-Cheol Min
0
0
In public spaces shared with humans, ensuring multi-robot systems navigate without collisions while respecting social norms is challenging, particularly with limited communication. Although current robot social navigation techniques leverage advances in reinforcement learning and deep learning, they frequently overlook robot dynamics in simulations, leading to a simulation-to-reality gap. In this paper, we bridge this gap by presenting a new multi-robot social navigation environment crafted using Dec-POSMDP and multi-agent reinforcement learning. Furthermore, we introduce SAMARL: a novel benchmark for cooperative multi-robot social navigation. SAMARL employs a unique spatial-temporal transformer combined with multi-agent reinforcement learning. This approach effectively captures the complex interactions between robots and humans, thus promoting cooperative tendencies in multi-robot systems. Our extensive experiments reveal that SAMARL outperforms existing baseline and ablation models in our designed environment. Demo videos for this work can be found at: https://sites.google.com/view/samarl
5/17/2024
MeSA-DRL: Memory-Enhanced Deep Reinforcement Learning for Advanced Socially Aware Robot Navigation in Crowded Environments
Mannan Saeed Muhammad, Estrella Montero
0
0
Autonomous navigation capabilities play a critical role in service robots operating in environments where human interactions are pivotal, due to the dynamic and unpredictable nature of these environments. However, the variability in human behavior presents a substantial challenge for robots in predicting and anticipating movements, particularly in crowded scenarios. To address this issue, a memory-enabled deep reinforcement learning framework is proposed for autonomous robot navigation in diverse pedestrian scenarios. The proposed framework leverages long-term memory to retain essential information about the surroundings and model sequential dependencies effectively. The importance of human-robot interactions is also encoded to assign higher attention to these interactions. A global planning mechanism is incorporated into the memory-enabled architecture. Additionally, a multi-term reward system is designed to prioritize and encourage long-sighted robot behaviors by incorporating dynamic warning zones. Simultaneously, it promotes smooth trajectories and minimizes the time taken to reach the robot's desired goal. Extensive simulation experiments show that the suggested approach outperforms representative state-of-the-art methods, showcasing its ability to a navigation efficiency and safety in real-world scenarios.
4/9/2024
💬
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
0
0
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
5/21/2024