DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing

0

Sign in to get full access
Overview
- This paper presents "DN-Splatter," a method for improving 3D reconstruction using Gaussian splatting with depth and normal priors.
- Gaussian splatting is a technique for rendering point clouds by representing each point as a Gaussian distribution, which helps smooth out the final result.
- The authors introduce new priors based on depth and surface normals to guide the Gaussian splatting process, leading to better reconstruction of indoor scenes.
- The proposed method is evaluated on several benchmark datasets and shows improved performance over previous Gaussian splatting approaches.
Plain English Explanation
The paper describes a new way to reconstruct 3D indoor scenes from point cloud data. The key idea is to use "Gaussian splatting," which treats each point in the cloud as a fuzzy, Gaussian-shaped blob rather than a sharp dot. This helps smooth out the final 3D model and fill in gaps.
To make the Gaussian splatting process even better, the authors introduce two new "priors" or constraints:
- Depth Prior: This encourages the model to preserve the overall depth structure of the scene, so the 3D reconstruction matches the real-world depths.
- Normal Prior: This encourages the model to preserve the surface normals (i.e., the direction the surface is facing) of the original surfaces, which helps maintain sharp edges and details.
By using these depth and normal priors, the DN-Splatter method is able to produce higher-quality 3D reconstructions of indoor environments compared to previous Gaussian splatting approaches, as demonstrated on benchmark datasets.
Technical Explanation
The paper introduces a new Gaussian splatting approach called "DN-Splatter" that incorporates depth and normal priors to improve 3D reconstruction quality. Gaussian splatting represents each point in a point cloud as a Gaussian distribution, which helps smooth out the final 3D model and fill in gaps.
The authors propose two new priors to guide the Gaussian splatting process:
- Depth Prior: This prior encourages the reconstructed depth map to match the input depth measurements, preserving the overall structure of the scene.
- Normal Prior: This prior encourages the reconstructed surface normals to align with the input normals, helping to maintain sharp edges and details.
These priors are integrated into an optimization framework that jointly optimizes the Gaussian splatting parameters and the final 3D reconstruction. The authors evaluate their DN-Splatter method on several indoor 3D reconstruction benchmarks, including GaussianRoom, MVG-Splatting, and 3D-HGS. The results show that the depth and normal priors lead to improved reconstruction quality compared to previous Gaussian splatting techniques.
Critical Analysis
The paper makes a compelling case for the benefits of incorporating depth and normal priors into the Gaussian splatting process for 3D reconstruction. The authors demonstrate clear performance improvements over prior methods on several benchmark datasets, indicating the value of their approach.
However, the paper does not address some potential limitations or areas for further research. For example, the method may struggle with highly complex or cluttered scenes where the depth and normal priors are not sufficient to resolve ambiguities. Additionally, the computational cost of the optimization-based approach could limit its scalability to large-scale reconstructions.
Further research could explore ways to make the method more robust and efficient, such as by incorporating learning-based techniques like those used in Direct Learning of Mesh Appearance via 3D Gaussian to learn the priors from data. Integrating the depth and normal priors into other 3D reconstruction pipelines beyond just Gaussian splatting could also be a fruitful avenue for future work.
Conclusion
The DN-Splatter method presented in this paper demonstrates the value of incorporating depth and normal priors into the Gaussian splatting process for 3D reconstruction of indoor scenes. By leveraging these priors, the authors are able to produce higher-quality reconstructions that better preserve the overall structure and details of the original environments.
While the paper has some limitations, the core idea of using domain-specific priors to guide 3D reconstruction is a promising direction for further research. As 3D sensing and modeling continue to advance, techniques like DN-Splatter that can extract more meaningful information from point cloud data will become increasingly important for realistic and accurate 3D representations of the world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing
Matias Turkulainen, Xuqian Ren, Iaroslav Melekhov, Otto Seiskari, Esa Rahtu, Juho Kannala
High-fidelity 3D reconstruction of common indoor scenes is crucial for VR and AR applications. 3D Gaussian splatting, a novel differentiable rendering technique, has achieved state-of-the-art novel view synthesis results with high rendering speeds and relatively low training times. However, its performance on scenes commonly seen in indoor datasets is poor due to the lack of geometric constraints during optimization. We extend 3D Gaussian splatting with depth and normal cues to tackle challenging indoor datasets and showcase techniques for efficient mesh extraction. Specifically, we regularize the optimization procedure with depth information, enforce local smoothness of nearby Gaussians, and use off-the-shelf monocular networks to achieve better alignment with the true scene geometry. We propose an adaptive depth loss based on the gradient of color images, improving depth estimation and novel view synthesis results over various baselines. Our simple yet effective regularization technique enables direct mesh extraction from the Gaussian representation, yielding more physically accurate reconstructions of indoor scenes. Our code will be released in https://github.com/maturk/dn-splatter.
Read more7/19/2024

0
Self-Evolving Depth-Supervised 3D Gaussian Splatting from Rendered Stereo Pairs
Sadra Safadoust, Fabio Tosi, Fatma Guney, Matteo Poggi
3D Gaussian Splatting (GS) significantly struggles to accurately represent the underlying 3D scene geometry, resulting in inaccuracies and floating artifacts when rendering depth maps. In this paper, we address this limitation, undertaking a comprehensive analysis of the integration of depth priors throughout the optimization process of Gaussian primitives, and present a novel strategy for this purpose. This latter dynamically exploits depth cues from a readily available stereo network, processing virtual stereo pairs rendered by the GS model itself during training and achieving consistent self-improvement of the scene representation. Experimental results on three popular datasets, breaking ground as the first to assess depth accuracy for these models, validate our findings.
Read more9/12/2024
0
GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
Haodong Xiang, Xinghui Li, Xiansong Lai, Wanting Zhang, Zhichao Liao, Kai Cheng, Xueping Liu
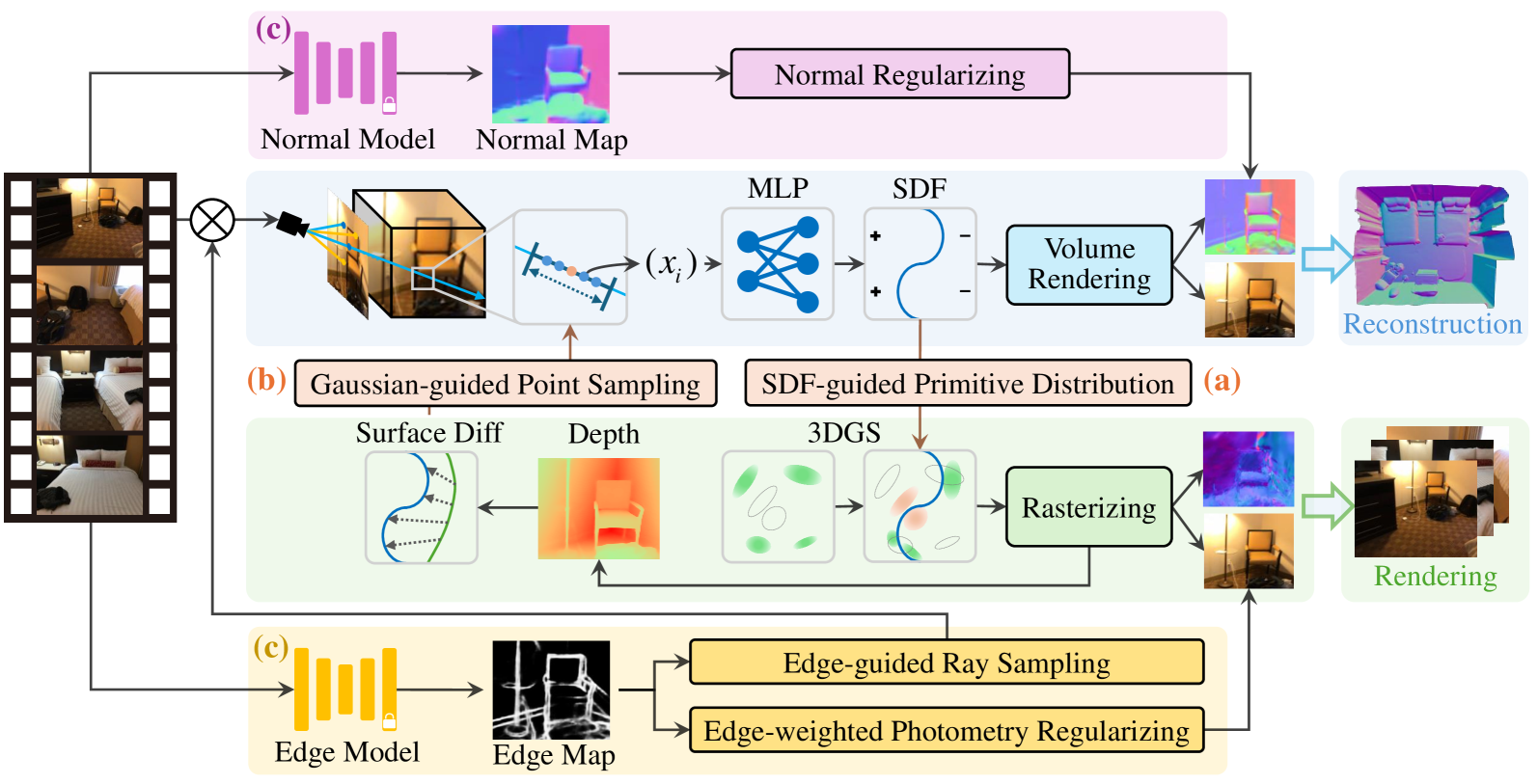
Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
Read more5/31/2024
0
RaDe-GS: Rasterizing Depth in Gaussian Splatting
Baowen Zhang, Chuan Fang, Rakesh Shrestha, Yixun Liang, Xiaoxiao Long, Ping Tan
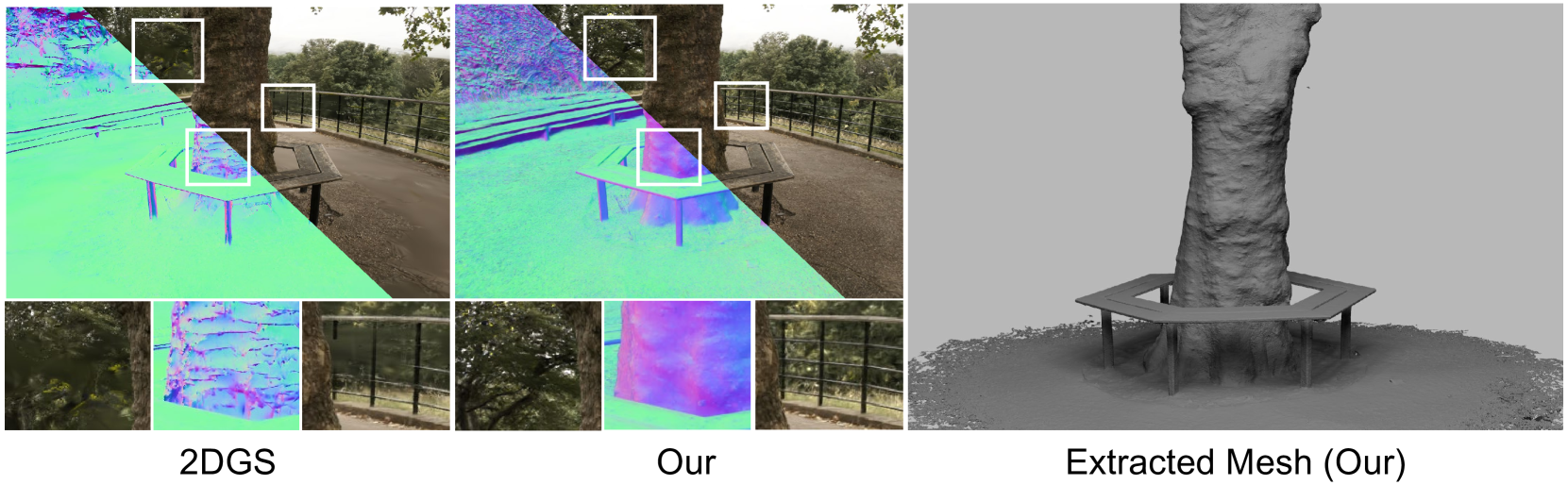
Gaussian Splatting (GS) has proven to be highly effective in novel view synthesis, achieving high-quality and real-time rendering. However, its potential for reconstructing detailed 3D shapes has not been fully explored. Existing methods often suffer from limited shape accuracy due to the discrete and unstructured nature of Gaussian splats, which complicates the shape extraction. While recent techniques like 2D GS have attempted to improve shape reconstruction, they often reformulate the Gaussian primitives in ways that reduce both rendering quality and computational efficiency. To address these problems, our work introduces a rasterized approach to render the depth maps and surface normal maps of general 3D Gaussian splats. Our method not only significantly enhances shape reconstruction accuracy but also maintains the computational efficiency intrinsic to Gaussian Splatting. It achieves a Chamfer distance error comparable to NeuraLangelo on the DTU dataset and maintains similar computational efficiency as the original 3D GS methods. Our method is a significant advancement in Gaussian Splatting and can be directly integrated into existing Gaussian Splatting-based methods.
Read more6/26/2024