A domain decomposition-based autoregressive deep learning model for unsteady and nonlinear partial differential equations

0

Sign in to get full access
Overview
- This paper presents a domain decomposition-based autoregressive deep learning model for solving unsteady and nonlinear partial differential equations (PDEs).
- The approach involves dividing the computational domain into smaller subdomains and using an autoregressive deep learning model to predict the solution in each subdomain.
- The model is designed to capture the nonlinear and unsteady nature of the PDE, making it suitable for a wide range of applications.
Plain English Explanation
The paper describes a new way to solve complex mathematical equations called partial differential equations (PDEs) using machine learning. PDEs are used to model many real-world phenomena, like fluid flow, heat transfer, and wave propagation, but they can be very difficult to solve, especially when the equations are nonlinear and the system is unsteady (changing over time).
The key idea is to break up the problem domain into smaller pieces, called subdomains, and then use a special type of machine learning model called an autoregressive model to predict the solution in each subdomain. This allows the model to capture the complex, nonlinear and time-dependent nature of the PDE.
The advantage of this approach is that it can handle a wide range of PDEs that are difficult to solve using traditional numerical methods, making it useful for many real-world applications where accurate and efficient PDE solvers are needed.
Technical Explanation
The paper presents a domain decomposition-based autoregressive deep learning model for solving unsteady and nonlinear partial differential equations. The key aspects of the methodology are:
-
Domain Decomposition: The computational domain is divided into smaller subdomains, allowing the model to capture local nonlinearities and time-dependent behavior more effectively.
-
Autoregressive Model: An autoregressive deep learning model is used to predict the solution in each subdomain. This type of model can capture the nonlinear and unsteady nature of the PDE by conditioning the prediction on the previous time step's solution.
-
Feature Engineering: The model's input features include the current time step, the spatial coordinates, and the previous time step's solution, which helps the model learn the underlying dynamics of the PDE.
-
Training and Inference: The model is trained on a dataset of PDE solutions, and during inference, it predicts the solution in each subdomain sequentially, with the output of one subdomain feeding into the input of the next.
The authors demonstrate the effectiveness of their approach on several benchmark PDE problems, showing that it can achieve high accuracy and computational efficiency compared to traditional numerical methods.
Critical Analysis
The paper presents a novel and promising approach to solving unsteady and nonlinear PDEs using domain decomposition and autoregressive deep learning. Some key strengths of the research include:
- The ability to capture complex nonlinear and time-dependent behavior in PDEs, which is a significant challenge for many existing numerical methods.
- The flexibility of the approach, which can be applied to a wide range of PDE problems without major modifications.
- The demonstrated improvements in accuracy and computational efficiency compared to traditional methods.
However, the paper also acknowledges some limitations and areas for further research:
- The impact of the domain decomposition strategy and the choice of subdomain size on the model's performance is not fully explored.
- The generalization of the model to more complex PDE systems and real-world applications may require additional research and validation.
- The interpretability of the autoregressive deep learning model and its ability to provide physical insights into the underlying PDE dynamics could be further investigated.
Overall, this research represents an important step forward in the development of efficient and accurate PDE solvers using deep learning techniques. Further exploration of the method's capabilities, limitations, and potential extensions could lead to significant advancements in the field of computational physics and engineering.
Conclusion
This paper presents a novel domain decomposition-based autoregressive deep learning model for solving unsteady and nonlinear partial differential equations. The key innovation is the use of an autoregressive deep learning model to predict the solution in each subdomain of the computational domain, allowing the model to capture the complex nonlinear and time-dependent behavior of the PDE.
The authors demonstrate the effectiveness of their approach on several benchmark PDE problems, showing improvements in accuracy and computational efficiency compared to traditional numerical methods. This research represents an important step forward in the development of efficient and accurate PDE solvers using deep learning, with potential applications in a wide range of fields, such as fluid dynamics, heat transfer, and wave propagation.
While the paper acknowledges some limitations and areas for further research, the overall approach shows great promise for solving challenging PDE problems that have traditionally been difficult to model using conventional numerical techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A domain decomposition-based autoregressive deep learning model for unsteady and nonlinear partial differential equations
Sheel Nidhan, Haoliang Jiang, Lalit Ghule, Clancy Umphrey, Rishikesh Ranade, Jay Pathak
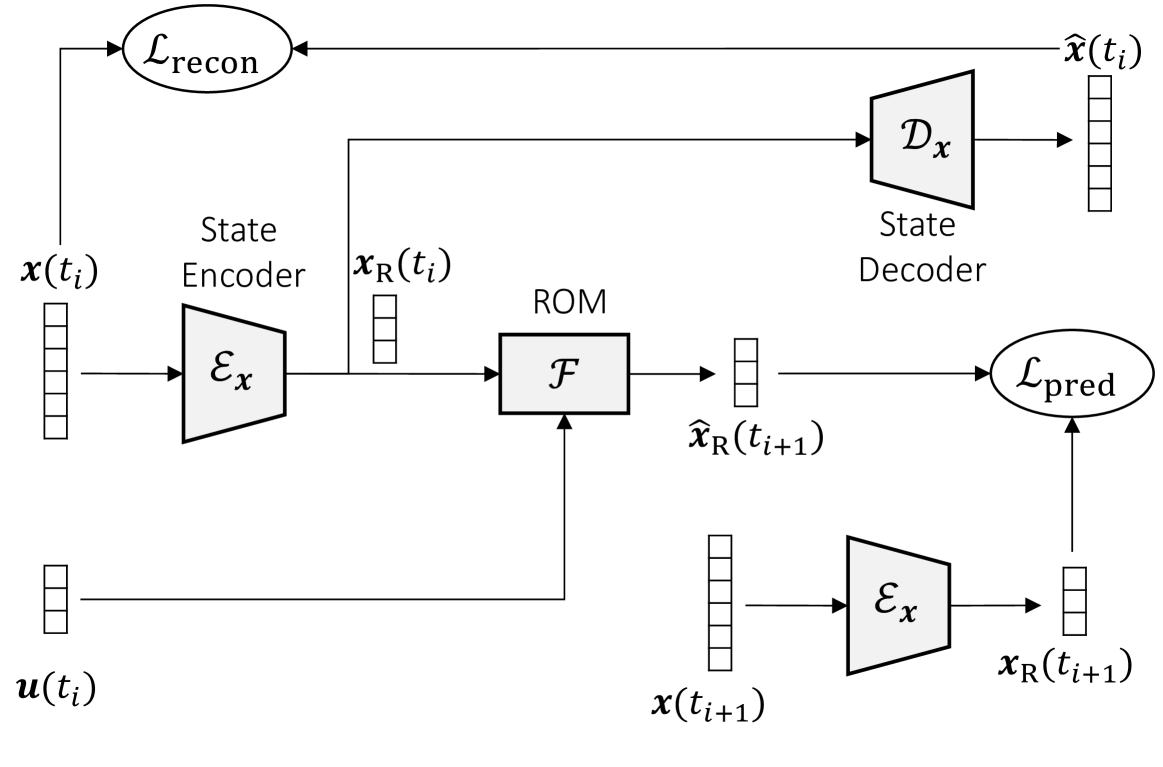
In this paper, we propose a domain-decomposition-based deep learning (DL) framework, named transient-CoMLSim, for accurately modeling unsteady and nonlinear partial differential equations (PDEs). The framework consists of two key components: (a) a convolutional neural network (CNN)-based autoencoder architecture and (b) an autoregressive model composed of fully connected layers. Unlike existing state-of-the-art methods that operate on the entire computational domain, our CNN-based autoencoder computes a lower-dimensional basis for solution and condition fields represented on subdomains. Timestepping is performed entirely in the latent space, generating embeddings of the solution variables from the time history of embeddings of solution and condition variables. This approach not only reduces computational complexity but also enhances scalability, making it well-suited for large-scale simulations. Furthermore, to improve the stability of our rollouts, we employ a curriculum learning (CL) approach during the training of the autoregressive model. The domain-decomposition strategy enables scaling to out-of-distribution domain sizes while maintaining the accuracy of predictions -- a feature not easily integrated into popular DL-based approaches for physics simulations. We benchmark our model against two widely-used DL architectures, Fourier Neural Operator (FNO) and U-Net, and demonstrate that our framework outperforms them in terms of accuracy, extrapolation to unseen timesteps, and stability for a wide range of use cases.
Read more8/28/2024
0
On latent dynamics learning in nonlinear reduced order modeling
Nicola Farenga, Stefania Fresca, Simone Brivio, Andrea Manzoni
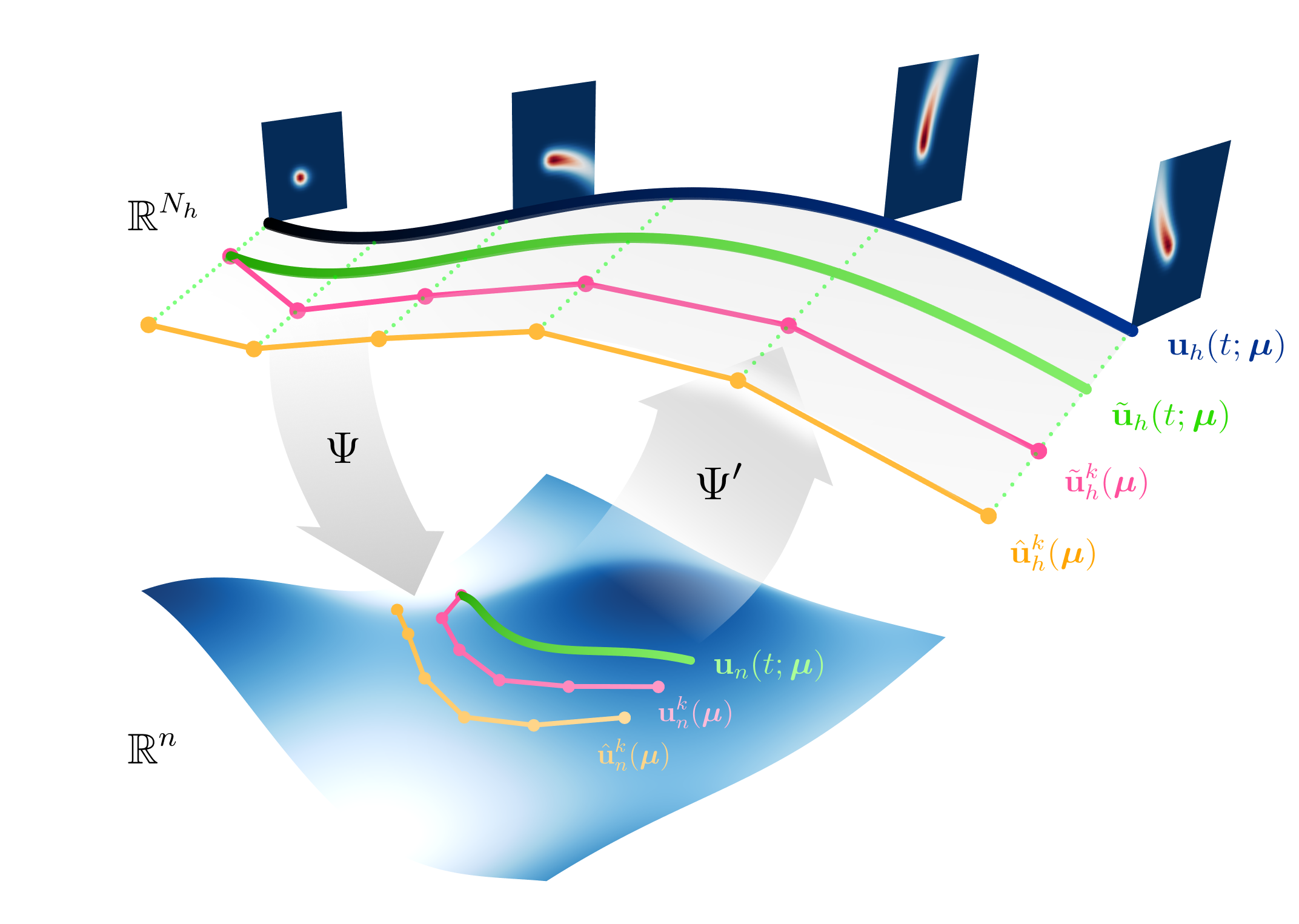
In this work, we present the novel mathematical framework of latent dynamics models (LDMs) for reduced order modeling of parameterized nonlinear time-dependent PDEs. Our framework casts this latter task as a nonlinear dimensionality reduction problem, while constraining the latent state to evolve accordingly to an (unknown) dynamical system. A time-continuous setting is employed to derive error and stability estimates for the LDM approximation of the full order model (FOM) solution. We analyze the impact of using an explicit Runge-Kutta scheme in the time-discrete setting, resulting in the $Deltatext{LDM}$ formulation, and further explore the learnable setting, $Deltatext{LDM}_theta$, where deep neural networks approximate the discrete LDM components, while providing a bounded approximation error with respect to the FOM. Moreover, we extend the concept of parameterized Neural ODE - recently proposed as a possible way to build data-driven dynamical systems with varying input parameters - to be a convolutional architecture, where the input parameters information is injected by means of an affine modulation mechanism, while designing a convolutional autoencoder neural network able to retain spatial-coherence, thus enhancing interpretability at the latent level. Numerical experiments, including the Burgers' and the advection-reaction-diffusion equations, demonstrate the framework's ability to obtain, in a multi-query context, a time-continuous approximation of the FOM solution, thus being able to query the LDM approximation at any given time instance while retaining a prescribed level of accuracy. Our findings highlight the remarkable potential of the proposed LDMs, representing a mathematically rigorous framework to enhance the accuracy and approximation capabilities of reduced order modeling for time-dependent parameterized PDEs.
Read more8/28/2024
0
Bridging Autoencoders and Dynamic Mode Decomposition for Reduced-order Modeling and Control of PDEs
Priyabrata Saha, Saibal Mukhopadhyay
Modeling and controlling complex spatiotemporal dynamical systems driven by partial differential equations (PDEs) often necessitate dimensionality reduction techniques to construct lower-order models for computational efficiency. This paper explores a deep autoencoding learning method for reduced-order modeling and control of dynamical systems governed by spatiotemporal PDEs. We first analytically show that an optimization objective for learning a linear autoencoding reduced-order model can be formulated to yield a solution closely resembling the result obtained through the dynamic mode decomposition with control algorithm. We then extend this linear autoencoding architecture to a deep autoencoding framework, enabling the development of a nonlinear reduced-order model. Furthermore, we leverage the learned reduced-order model to design controllers using stability-constrained deep neural networks. Numerical experiments are presented to validate the efficacy of our approach in both modeling and control using the example of a reaction-diffusion system.
Read more9/12/2024

0
Self-supervised Pretraining for Partial Differential Equations
Varun Madhavan, Amal S Sebastian, Bharath Ramsundar, Venkatasubramanian Viswanathan
In this work, we describe a novel approach to building a neural PDE solver leveraging recent advances in transformer based neural network architectures. Our model can provide solutions for different values of PDE parameters without any need for retraining the network. The training is carried out in a self-supervised manner, similar to pretraining approaches applied in language and vision tasks. We hypothesize that the model is in effect learning a family of operators (for multiple parameters) mapping the initial condition to the solution of the PDE at any future time step t. We compare this approach with the Fourier Neural Operator (FNO), and demonstrate that it can generalize over the space of PDE parameters, despite having a higher prediction error for individual parameter values compared to the FNO. We show that performance on a specific parameter can be improved by finetuning the model with very small amounts of data. We also demonstrate that the model scales with data as well as model size.
Read more7/10/2024