Bridging Autoencoders and Dynamic Mode Decomposition for Reduced-order Modeling and Control of PDEs

0
Sign in to get full access
Overview
- Presents a novel approach that bridges autoencoders and dynamic mode decomposition for reduced-order modeling and control of partial differential equations (PDEs)
- Proposes a hybrid model that combines the strengths of both techniques to enable efficient and accurate PDE modeling and control
- Demonstrates the effectiveness of the proposed approach on several benchmark PDE problems, including the Navier-Stokes equations and the Kuramoto-Sivashinsky equation
Plain English Explanation
Partial differential equations (PDEs) are mathematical models used to describe complex physical phenomena, such as fluid flow, heat transfer, and wave propagation. Solving these equations can be computationally intensive, especially for large-scale problems. To overcome this challenge, researchers have developed techniques like dynamic mode decomposition and autoencoders to create reduced-order models that capture the essential dynamics of the system while significantly reducing the computational cost.
In this paper, the researchers propose a novel approach that combines the strengths of autoencoders and dynamic mode decomposition to create an even more powerful reduced-order modeling and control framework for PDEs. The key idea is to use the autoencoder's ability to learn efficient representations of the PDE solutions, while incorporating the dynamic mode decomposition's insights into the underlying system dynamics. This hybrid model can then be used to accurately predict the evolution of the PDE system and to design optimal control strategies for various applications.
The researchers demonstrate the effectiveness of their approach on several benchmark PDE problems, showing that it can outperform traditional reduced-order modeling techniques in terms of accuracy and computational efficiency. This work has important implications for a wide range of fields, from fluid dynamics and combustion to climate modeling and material science, where the efficient modeling and control of complex PDE systems are critical.
Technical Explanation
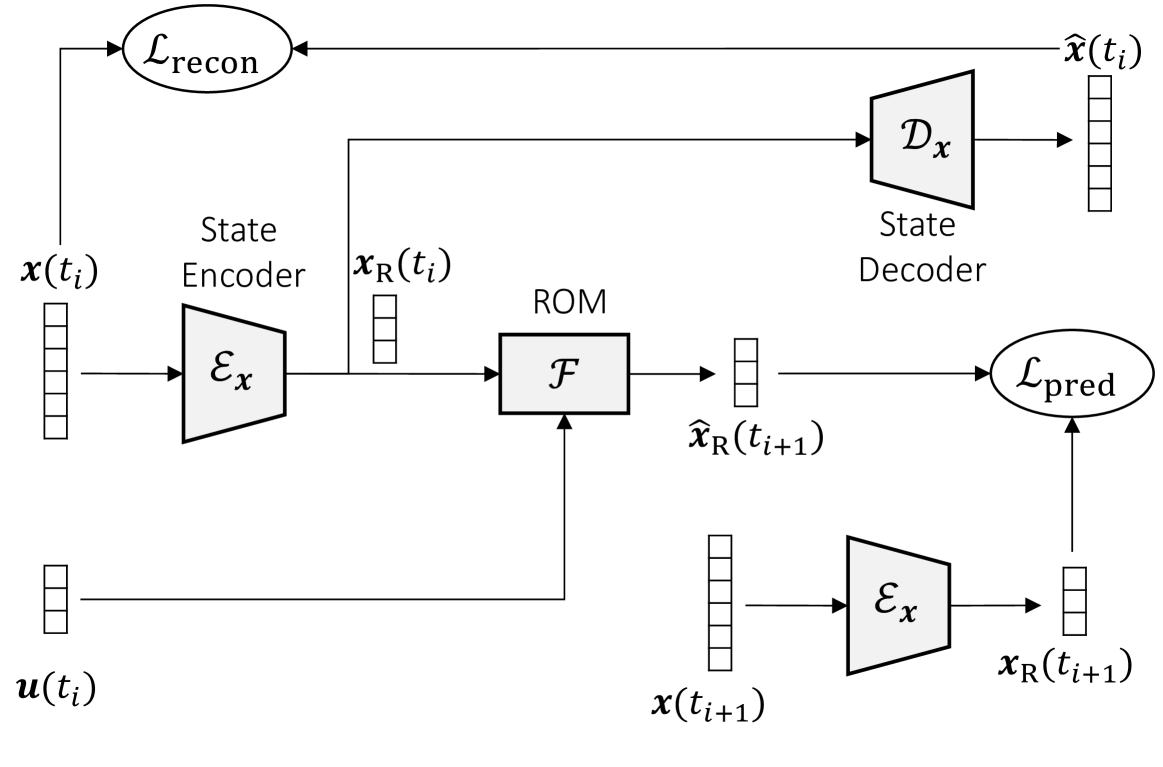
The paper proposes a hybrid approach that combines autoencoders and dynamic mode decomposition (DMD) for reduced-order modeling and control of PDEs. The key components of the proposed framework are:
-
Autoencoder-based Dimensionality Reduction: The researchers use an autoencoder, a type of neural network, to learn a low-dimensional representation of the PDE solutions. The autoencoder maps the high-dimensional PDE solutions to a compact latent space, which can be used as the basis for reduced-order modeling.
-
Dynamic Mode Decomposition: DMD is a data-driven technique that extracts the dominant spatial and temporal modes of a dynamical system from its time-series data. The researchers incorporate DMD into the autoencoder framework to capture the underlying system dynamics in the latent space.
-
Reduced-order Modeling and Control: The hybrid autoencoder-DMD model is used to construct a reduced-order model of the PDE system, which can then be employed for optimal control and other applications.
The key innovation of this work is the seamless integration of autoencoders and DMD, which allows the researchers to leverage the strengths of both techniques. The autoencoder learns an efficient representation of the PDE solutions, while the DMD component captures the underlying dynamics in the latent space. This combined approach outperforms traditional reduced-order modeling techniques on several benchmark PDE problems, demonstrating its potential for real-world applications.
Critical Analysis
The paper presents a well-designed and thorough study, with comprehensive experiments and insightful analysis. However, there are a few aspects that could be further explored or clarified:
-
Generalization to other PDE systems: The researchers have demonstrated the effectiveness of their approach on a few benchmark PDE problems, but it would be valuable to see how the method performs on a wider range of PDE systems, especially those with more complex dynamics or higher dimensions.
-
Scalability and computational efficiency: While the proposed hybrid model shows promising results, the researchers could provide more details on the computational complexity and scaling behavior of the approach, especially for larger-scale PDE problems.
-
Sensitivity to hyperparameters and initialization: The performance of the autoencoder and DMD components may be sensitive to the choice of hyperparameters and initialization. The authors could explore the robustness of their method to these factors and provide guidance on optimal parameter selection.
-
Comparison to other reduced-order modeling techniques: It would be helpful to see a more comprehensive comparison of the proposed approach with other state-of-the-art reduced-order modeling techniques, such as Proper Orthogonal Decomposition or Sparse Identification of Nonlinear Dynamics, to better understand its relative strengths and weaknesses.
Overall, this paper presents a promising and well-executed approach for reduced-order modeling and control of PDEs, with the potential to significantly impact a wide range of scientific and engineering applications.
Conclusion
This paper introduces a novel hybrid approach that bridges autoencoders and dynamic mode decomposition for efficient reduced-order modeling and control of partial differential equations. The researchers demonstrate that by combining the strengths of these two techniques, they can create a powerful framework that outperforms traditional reduced-order modeling methods on several benchmark PDE problems.
The proposed approach has important implications for a wide range of fields, as it can significantly reduce the computational cost of modeling and controlling complex PDE systems, while maintaining a high degree of accuracy. While the paper presents a solid foundation, there are opportunities for further exploration and improvement, such as evaluating the method's performance on a broader range of PDE systems and investigating its scalability and sensitivity to hyperparameters.
Overall, this work represents an important step forward in the field of reduced-order modeling and control, and the researchers have provided a valuable contribution to the ongoing efforts to make the simulation and optimization of complex physical systems more efficient and accessible.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Bridging Autoencoders and Dynamic Mode Decomposition for Reduced-order Modeling and Control of PDEs
Priyabrata Saha, Saibal Mukhopadhyay
Modeling and controlling complex spatiotemporal dynamical systems driven by partial differential equations (PDEs) often necessitate dimensionality reduction techniques to construct lower-order models for computational efficiency. This paper explores a deep autoencoding learning method for reduced-order modeling and control of dynamical systems governed by spatiotemporal PDEs. We first analytically show that an optimization objective for learning a linear autoencoding reduced-order model can be formulated to yield a solution closely resembling the result obtained through the dynamic mode decomposition with control algorithm. We then extend this linear autoencoding architecture to a deep autoencoding framework, enabling the development of a nonlinear reduced-order model. Furthermore, we leverage the learned reduced-order model to design controllers using stability-constrained deep neural networks. Numerical experiments are presented to validate the efficacy of our approach in both modeling and control using the example of a reaction-diffusion system.
Read more9/12/2024

0
Real-time optimal control of high-dimensional parametrized systems by deep learning-based reduced order models
Matteo Tomasetto, Andrea Manzoni, Francesco Braghin
Steering a system towards a desired target in a very short amount of time is challenging from a computational standpoint. Indeed, the intrinsically iterative nature of optimal control problems requires multiple simulations of the physical system to be controlled. Moreover, the control action needs to be updated whenever the underlying scenario undergoes variations. Full-order models based on, e.g., the Finite Element Method, do not meet these requirements due to the computational burden they usually entail. On the other hand, conventional reduced order modeling techniques such as the Reduced Basis method, are intrusive, rely on a linear superimposition of modes, and lack of efficiency when addressing nonlinear time-dependent dynamics. In this work, we propose a non-intrusive Deep Learning-based Reduced Order Modeling (DL-ROM) technique for the rapid control of systems described in terms of parametrized PDEs in multiple scenarios. In particular, optimal full-order snapshots are generated and properly reduced by either Proper Orthogonal Decomposition or deep autoencoders (or a combination thereof) while feedforward neural networks are exploited to learn the map from scenario parameters to reduced optimal solutions. Nonlinear dimensionality reduction therefore allows us to consider state variables and control actions that are both low-dimensional and distributed. After (i) data generation, (ii) dimensionality reduction, and (iii) neural networks training in the offline phase, optimal control strategies can be rapidly retrieved in an online phase for any scenario of interest. The computational speedup and the high accuracy obtained with the proposed approach are assessed on different PDE-constrained optimization problems, ranging from the minimization of energy dissipation in incompressible flows modelled through Navier-Stokes equations to the thermal active cooling in heat transfer.
Read more9/10/2024
0
Sparsifying dimensionality reduction of PDE solution data with Bregman learning
Tjeerd Jan Heeringa, Christoph Brune, Mengwu Guo
Classical model reduction techniques project the governing equations onto a linear subspace of the original state space. More recent data-driven techniques use neural networks to enable nonlinear projections. Whilst those often enable stronger compression, they may have redundant parameters and lead to suboptimal latent dimensionality. To overcome these, we propose a multistep algorithm that induces sparsity in the encoder-decoder networks for effective reduction in the number of parameters and additional compression of the latent space. This algorithm starts with sparsely initialized a network and training it using linearized Bregman iterations. These iterations have been very successful in computer vision and compressed sensing tasks, but have not yet been used for reduced-order modelling. After the training, we further compress the latent space dimensionality by using a form of proper orthogonal decomposition. Last, we use a bias propagation technique to change the induced sparsity into an effective reduction of parameters. We apply this algorithm to three representative PDE models: 1D diffusion, 1D advection, and 2D reaction-diffusion. Compared to conventional training methods like Adam, the proposed method achieves similar accuracy with 30% less parameters and a significantly smaller latent space.
Read more6/19/2024
0
On latent dynamics learning in nonlinear reduced order modeling
Nicola Farenga, Stefania Fresca, Simone Brivio, Andrea Manzoni
In this work, we present the novel mathematical framework of latent dynamics models (LDMs) for reduced order modeling of parameterized nonlinear time-dependent PDEs. Our framework casts this latter task as a nonlinear dimensionality reduction problem, while constraining the latent state to evolve accordingly to an (unknown) dynamical system. A time-continuous setting is employed to derive error and stability estimates for the LDM approximation of the full order model (FOM) solution. We analyze the impact of using an explicit Runge-Kutta scheme in the time-discrete setting, resulting in the $Deltatext{LDM}$ formulation, and further explore the learnable setting, $Deltatext{LDM}_theta$, where deep neural networks approximate the discrete LDM components, while providing a bounded approximation error with respect to the FOM. Moreover, we extend the concept of parameterized Neural ODE - recently proposed as a possible way to build data-driven dynamical systems with varying input parameters - to be a convolutional architecture, where the input parameters information is injected by means of an affine modulation mechanism, while designing a convolutional autoencoder neural network able to retain spatial-coherence, thus enhancing interpretability at the latent level. Numerical experiments, including the Burgers' and the advection-reaction-diffusion equations, demonstrate the framework's ability to obtain, in a multi-query context, a time-continuous approximation of the FOM solution, thus being able to query the LDM approximation at any given time instance while retaining a prescribed level of accuracy. Our findings highlight the remarkable potential of the proposed LDMs, representing a mathematically rigorous framework to enhance the accuracy and approximation capabilities of reduced order modeling for time-dependent parameterized PDEs.
Read more8/28/2024