MoDem-V2: Visuo-Motor World Models for Real-World Robot Manipulation

0
📉
Sign in to get full access
Overview
- The paper presents a system called MoDem-V2 that can learn contact-rich manipulation skills directly in the real world without the need for environment instrumentation.
- The system builds on advancements in model-based reinforcement learning (MBRL), demonstration bootstrapping, and effective exploration to overcome the challenges of navigating high-dimensional, contact-rich environments using only sparse visual feedback.
- The key contributions include exploration centering, agency handover, and actor-critic ensembles, which enable the system to learn dexterous manipulation skills directly in the real world.
Plain English Explanation
The paper describes a robotic system called MoDem-V2 that can learn complex manipulation skills in the real world without needing any special equipment or setup in the environment. Most robot systems today require a lot of pre-planning and instrumentation of the environment to function properly, which can be time-consuming and impractical. MoDem-V2 instead uses advanced machine learning techniques to understand the world around it just by looking at it with its cameras.
The key challenge is that navigating the high-dimensional, contact-rich environment using only sparse visual feedback is extremely difficult for a robot to learn on its own. Previous systems that relied solely on visual input have been limited to simulated or heavily engineered environments, as exploration in the real world without explicit guidance can lead to unsafe behaviors.
MoDem-V2 overcomes these limitations by combining several innovative techniques:
- Model-based reinforcement learning (MBRL): The system builds an internal model of the world to plan its actions, rather than just reacting to the current visual input.
- Demonstration bootstrapping: The system uses examples of successful manipulation from a human to kickstart the learning process, rather than starting from scratch.
- Effective exploration: The system has special mechanisms to explore the environment safely and efficiently, focusing on the most important aspects for the task at hand.
These key ingredients allow MoDem-V2 to learn dexterous manipulation skills directly in the real world, without any special setup or instrumentation. This represents a significant advancement in the field of robotic manipulation, as it paves the way for more flexible and adaptable robot systems that can operate in complex, unstructured environments.
Technical Explanation
The paper presents the MoDem-V2 system, which builds on the latest advancements in model-based reinforcement learning (MBRL), demo-bootstrapping, and effective exploration to enable real-world, contact-rich manipulation learning without the need for environment instrumentation.
The key technical contributions include:
-
Exploration Centering: The system focuses its exploration around the current state of the environment, rather than randomly exploring the entire state space. This helps the agent learn more efficiently by focusing on the most relevant aspects of the task.
-
Agency Handover: The system gradually transitions from using the human demonstrations to guide its actions, to learning and acting autonomously as its skills improve. This allows it to benefit from the demonstrations early on, while eventually becoming self-sufficient.
-
Actor-Critic Ensembles: The system uses an ensemble of actor-critic models, which provides more robust and reliable performance than a single model. This helps the system make better decisions and handle the high-dimensional, contact-rich environment more effectively.
The authors evaluate MoDem-V2 on four complex visuo-motor manipulation problems, both in simulation and the real world. The results demonstrate the system's ability to learn dexterous manipulation skills directly in the uninstrumented real-world environment, which represents a significant advancement over previous approaches that were limited to simulated or heavily engineered environments.
Critical Analysis
The paper presents a promising approach for enabling real-world robotic manipulation without the need for extensive environment instrumentation. The key technical contributions, such as exploration centering, agency handover, and actor-critic ensembles, appear to be well-designed and effective in addressing the challenges of learning in high-dimensional, contact-rich environments.
However, the paper does not provide a comprehensive discussion of the limitations and potential issues with the MoDem-V2 system. For example, it would be valuable to understand the system's performance in more complex or adversarial environments, or how it might handle unexpected changes or perturbations in the real-world setting.
Additionally, the paper could benefit from a more in-depth comparison to related approaches in the field of robotic manipulation and perception, which would help readers better understand the unique contributions and potential trade-offs of the MoDem-V2 system.
Overall, the paper presents a significant advancement in the field of robotic manipulation, but a more thorough discussion of the system's limitations and potential areas for further research would strengthen the work and provide a more well-rounded perspective for the reader.
Conclusion
The MoDem-V2 system represents a significant step forward in the field of robotic manipulation, as it demonstrates the ability to learn complex, contact-rich skills directly in the real world without the need for extensive environment instrumentation. By leveraging advancements in model-based reinforcement learning, demonstration bootstrapping, and effective exploration, the system is able to overcome the challenges of navigating high-dimensional, visually-sparse environments.
The key technical contributions, such as exploration centering, agency handover, and actor-critic ensembles, provide a solid foundation for enabling more flexible and adaptable robotic systems that can operate in complex, unstructured environments. The successful real-world experiments showcase the potential of this approach and pave the way for further advancements in the field of robotic manipulation and perception.
While the paper could benefit from a more comprehensive discussion of the system's limitations and potential areas for future research, the overall contribution represents a significant milestone in the pursuit of more capable and autonomous robotic systems that can seamlessly integrate with the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
MoDem-V2: Visuo-Motor World Models for Real-World Robot Manipulation
Patrick Lancaster, Nicklas Hansen, Aravind Rajeswaran, Vikash Kumar
Robotic systems that aspire to operate in uninstrumented real-world environments must perceive the world directly via onboard sensing. Vision-based learning systems aim to eliminate the need for environment instrumentation by building an implicit understanding of the world based on raw pixels, but navigating the contact-rich high-dimensional search space from solely sparse visual reward signals significantly exacerbates the challenge of exploration. The applicability of such systems is thus typically restricted to simulated or heavily engineered environments since agent exploration in the real-world without the guidance of explicit state estimation and dense rewards can lead to unsafe behavior and safety faults that are catastrophic. In this study, we isolate the root causes behind these limitations to develop a system, called MoDem-V2, capable of learning contact-rich manipulation directly in the uninstrumented real world. Building on the latest algorithmic advancements in model-based reinforcement learning (MBRL), demo-bootstrapping, and effective exploration, MoDem-V2 can acquire contact-rich dexterous manipulation skills directly in the real world. We identify key ingredients for leveraging demonstrations in model learning while respecting real-world safety considerations -- exploration centering, agency handover, and actor-critic ensembles. We empirically demonstrate the contribution of these ingredients in four complex visuo-motor manipulation problems in both simulation and the real world. To the best of our knowledge, our work presents the first successful system for demonstration-augmented visual MBRL trained directly in the real world. Visit https://sites.google.com/view/modem-v2 for videos and more details.
Read more5/14/2024

0
Manipulate-Anything: Automating Real-World Robots using Vision-Language Models
Jiafei Duan, Wentao Yuan, Wilbert Pumacay, Yi Ru Wang, Kiana Ehsani, Dieter Fox, Ranjay Krishna
Large-scale endeavors like and widespread community efforts such as Open-X-Embodiment have contributed to growing the scale of robot demonstration data. However, there is still an opportunity to improve the quality, quantity, and diversity of robot demonstration data. Although vision-language models have been shown to automatically generate demonstration data, their utility has been limited to environments with privileged state information, they require hand-designed skills, and are limited to interactions with few object instances. We propose Manipulate-Anything, a scalable automated generation method for real-world robotic manipulation. Unlike prior work, our method can operate in real-world environments without any privileged state information, hand-designed skills, and can manipulate any static object. We evaluate our method using two setups. First, Manipulate-Anything successfully generates trajectories for all 7 real-world and 14 simulation tasks, significantly outperforming existing methods like VoxPoser. Second, Manipulate-Anything's demonstrations can train more robust behavior cloning policies than training with human demonstrations, or from data generated by VoxPoser, Scaling-up, and Code-As-Policies. We believe Manipulate-Anything can be a scalable method for both generating data for robotics and solving novel tasks in a zero-shot setting. Project page: https://robot-ma.github.io/.
Read more8/30/2024
0
DeMoBot: Deformable Mobile Manipulation with Vision-based Sub-goal Retrieval
Yuying Zhang, Wenyan Yang, Joni Pajarinen
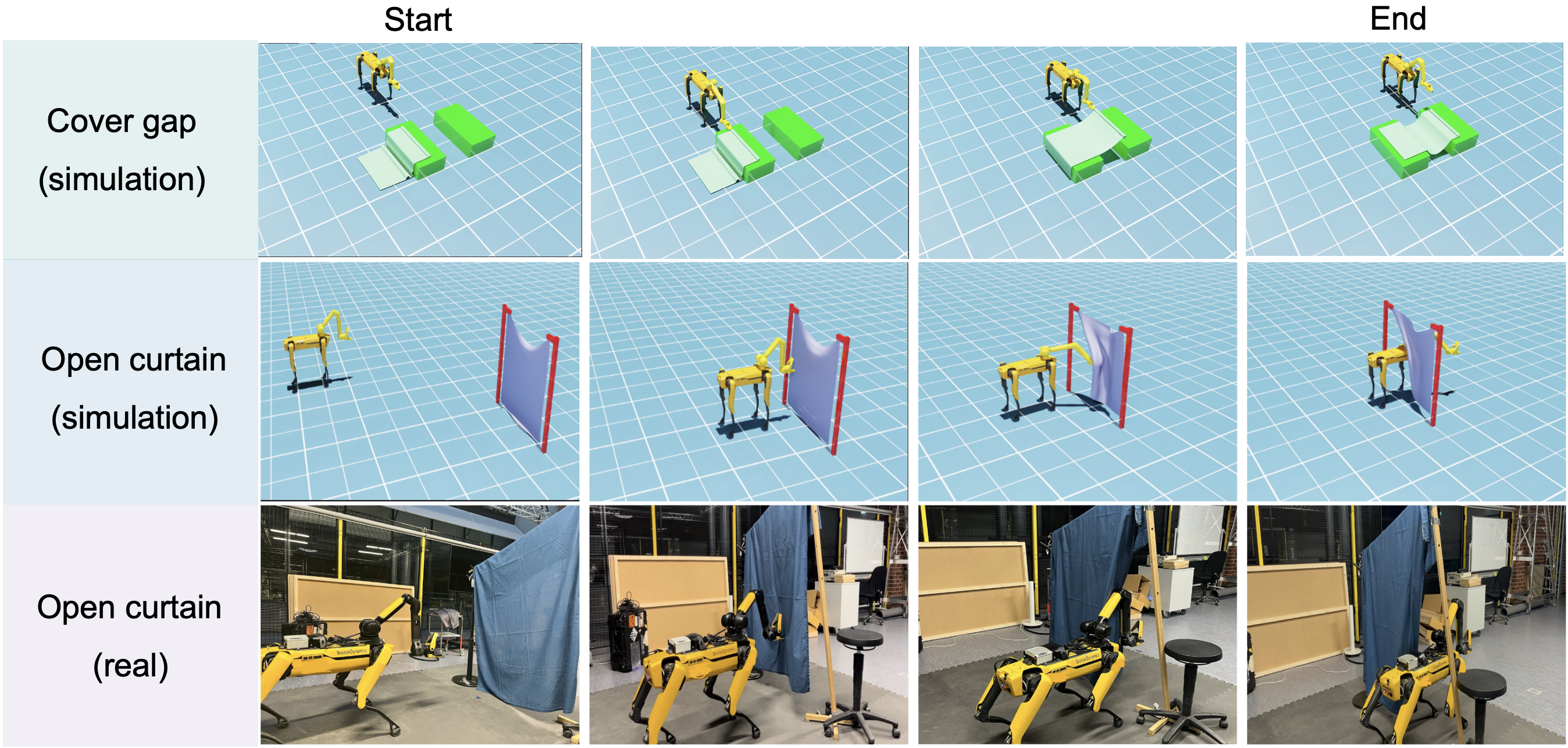
Imitation learning (IL) algorithms typically distill experience into parametric behavior policies to mimic expert demonstrations. Despite their effectiveness, previous methods often struggle with data efficiency and accurately aligning the current state with expert demonstrations, especially in deformable mobile manipulation tasks characterized by partial observations and dynamic object deformations. In this paper, we introduce textbf{DeMoBot}, a novel IL approach that directly retrieves observations from demonstrations to guide robots in textbf{De}formable textbf{Mo}bile manipulation tasks. DeMoBot utilizes vision foundation models to identify relevant expert data based on visual similarity and matches the current trajectory with demonstrated trajectories using trajectory similarity and forward reachability constraints to select suitable sub-goals. Once a goal is determined, a motion generation policy will guide the robot to the next state until the task is completed. We evaluated DeMoBot using a Spot robot in several simulated and real-world settings, demonstrating its effectiveness and generalizability. With only 20 demonstrations, DeMoBot significantly outperforms the baselines, reaching a 50% success rate in curtain opening and 85% in gap covering in simulation.
Read more8/29/2024
0
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
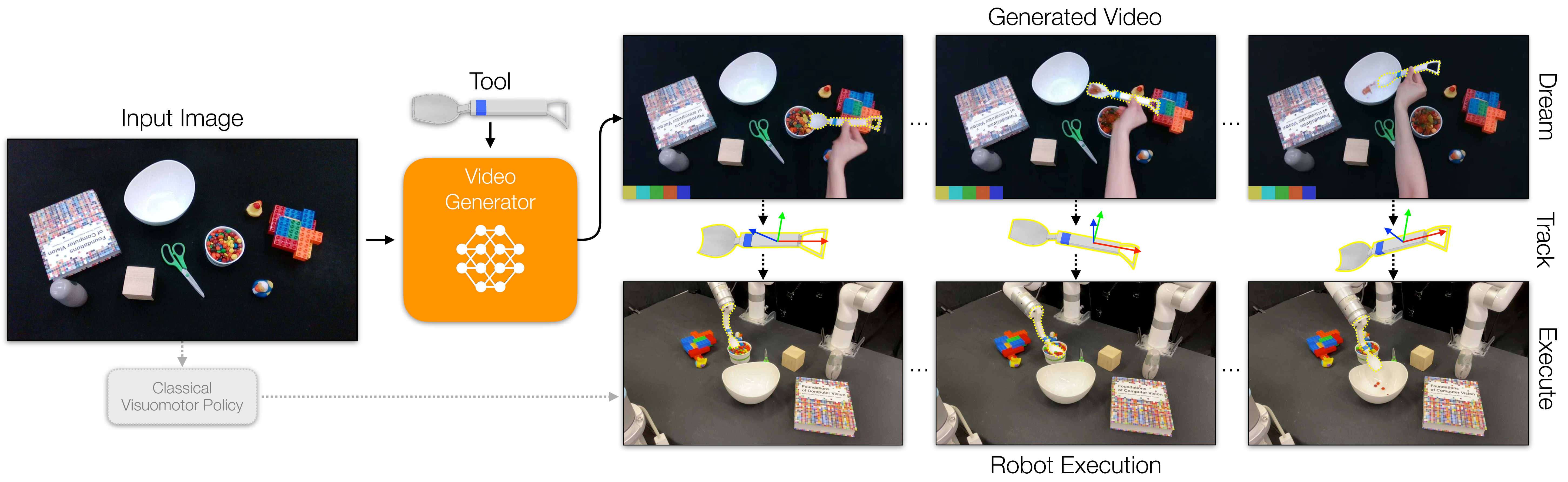
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Read more6/26/2024