Driving-Video Dehazing with Non-Aligned Regularization for Safety Assistance

0
Sign in to get full access
Overview
- This paper presents a novel method for dehazing driving videos to improve safety assistance systems.
- The proposed approach uses a non-aligned regularization technique to effectively remove haze and improve visibility in driving videos.
- The authors demonstrate the effectiveness of their method through extensive experiments and comparisons with state-of-the-art video dehazing techniques.
Plain English Explanation
Driving in poor weather conditions, such as fog or haze, can be a significant challenge for both human drivers and autonomous vehicles. Haze can reduce visibility and make it difficult to see the road, obstacles, and other vehicles, which can increase the risk of accidents. To address this problem, the researchers in this paper have developed a new technique to remove haze from driving videos.
Their method uses a non-aligned regularization approach, which means that the algorithm doesn't require the input and output frames to be perfectly aligned. This is important because driving videos often have slight misalignments between frames due to camera movement or vehicle motion. The non-aligned regularization allows the algorithm to effectively remove haze without being overly sensitive to these small misalignments.
By improving the visibility in driving videos, the researchers hope to enhance the performance of safety assistance systems, such as night-time image de-raining and video deinterlacing, which are crucial for autonomous driving and driver assistance technologies. The physics-guided parametric augmentation used in their method also helps to preserve important details and features in the dehazed images, further improving the safety and reliability of these systems.
Technical Explanation
The key technical aspects of the proposed method are:
-
Non-Aligned Regularization: The researchers have developed a novel non-aligned regularization technique that allows their dehazing algorithm to effectively remove haze without being sensitive to small misalignments between input and output frames. This is important for handling the slight camera and vehicle movements that are common in driving videos.
-
Multi-Scale Feature Fusion: The method uses a multi-scale feature fusion approach to capture information at different levels of detail, from coarse to fine. This helps to preserve important details and features in the dehazed images, which is crucial for safety-critical applications.
-
Physics-Guided Parametric Augmentation: The researchers have incorporated a physics-guided parametric augmentation module into their architecture. This module leverages physical principles to generate realistic haze patterns, which are used to train the dehazing model more effectively.
The authors have conducted extensive experiments to evaluate the performance of their method, comparing it to state-of-the-art video dehazing techniques. The results demonstrate the effectiveness of their approach in improving visibility and preserving important details in driving videos, making it a promising solution for enhancing the safety and reliability of autonomous driving and driver assistance systems.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated method for dehazing driving videos. The use of non-aligned regularization and physics-guided parametric augmentation are novel and promising approaches that address important challenges in this domain.
However, the paper does not discuss the potential limitations of their method, such as its performance in extreme weather conditions or its ability to handle complex lighting scenarios. Additionally, the authors do not explore the computational complexity and real-time performance of their algorithm, which are crucial factors for practical deployment in safety-critical applications.
Further research could investigate the robustness of the method to different types of haze and weather conditions, as well as its integration with other safety assistance technologies, such as object detection and tracking. Exploring the trade-offs between dehazing performance and computational efficiency would also be a valuable avenue for future work.
Conclusion
This paper presents a novel video dehazing method with non-aligned regularization for enhancing the safety of driving assistance systems. The proposed approach effectively removes haze from driving videos while preserving important details, making it a promising solution for improving the visibility and reliability of autonomous driving and driver assistance technologies. The authors have demonstrated the effectiveness of their method through comprehensive experiments, but further research is needed to address potential limitations and explore the real-world deployment of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Driving-Video Dehazing with Non-Aligned Regularization for Safety Assistance
Junkai Fan, Jiangwei Weng, Kun Wang, Yijun Yang, Jianjun Qian, Jun Li, Jian Yang
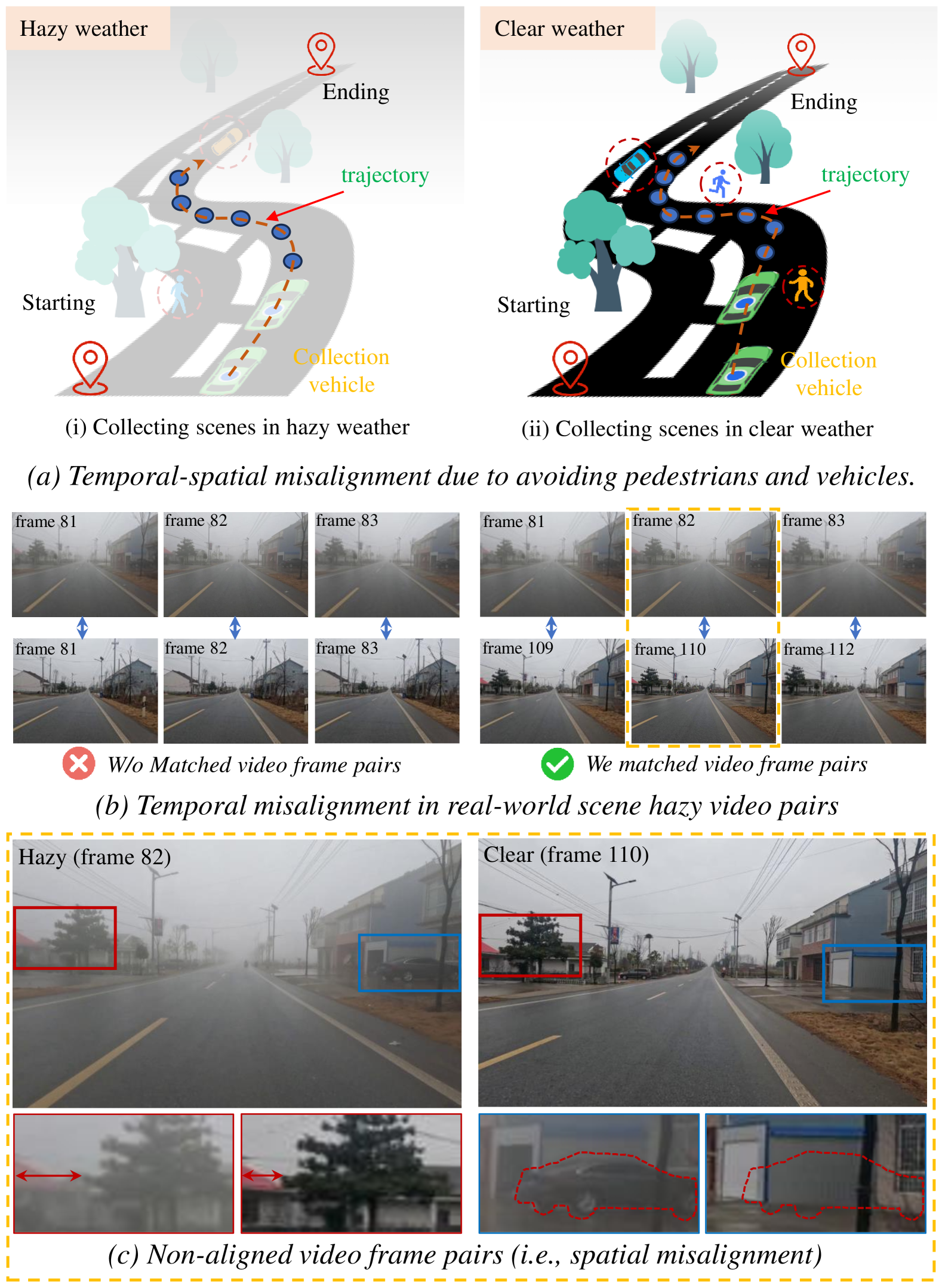
Real driving-video dehazing poses a significant challenge due to the inherent difficulty in acquiring precisely aligned hazy/clear video pairs for effective model training, especially in dynamic driving scenarios with unpredictable weather conditions. In this paper, we propose a pioneering approach that addresses this challenge through a nonaligned regularization strategy. Our core concept involves identifying clear frames that closely match hazy frames, serving as references to supervise a video dehazing network. Our approach comprises two key components: reference matching and video dehazing. Firstly, we introduce a non-aligned reference frame matching module, leveraging an adaptive sliding window to match high-quality reference frames from clear videos. Video dehazing incorporates flow-guided cosine attention sampler and deformable cosine attention fusion modules to enhance spatial multiframe alignment and fuse their improved information. To validate our approach, we collect a GoProHazy dataset captured effortlessly with GoPro cameras in diverse rural and urban road environments. Extensive experiments demonstrate the superiority of the proposed method over current state-of-the-art methods in the challenging task of real driving-video dehazing. Project page.
Read more5/17/2024
🖼️
0
Real-world Image Dehazing with Coherence-based Label Generator and Cooperative Unfolding Network
Chengyu Fang, Chunming He, Fengyang Xiao, Yulun Zhang, Longxiang Tang, Yuelin Zhang, Kai Li, Xiu Li
Real-world Image Dehazing (RID) aims to alleviate haze-induced degradation in real-world settings. This task remains challenging due to the complexities in accurately modeling real haze distributions and the scarcity of paired real-world data. To address these challenges, we first introduce a cooperative unfolding network that jointly models atmospheric scattering and image scenes, effectively integrating physical knowledge into deep networks to restore haze-contaminated details. Additionally, we propose the first RID-oriented iterative mean-teacher framework, termed the Coherence-based Label Generator, to generate high-quality pseudo labels for network training. Specifically, we provide an optimal label pool to store the best pseudo-labels during network training, leveraging both global and local coherence to select high-quality candidates and assign weights to prioritize haze-free regions. We verify the effectiveness of our method, with experiments demonstrating that it achieves state-of-the-art performance on RID tasks. Code will be available at url{https://github.com/cnyvfang/CORUN-Colabator}.
Read more8/23/2024

0
CrossDehaze: Scaling Up Image Dehazing with Cross-Data Vision Alignment and Augmentation
Yukai Shi, Zhipeng Weng, Yupei Lin, Cidan Shi, Xiaojun Yang, Liang Lin
In recent years, as computer vision tasks have increasingly relied on high-quality image inputs, the task of image dehazing has received significant attention. Previously, many methods based on priors and deep learning have been proposed to address the task of image dehazing. Ignoring the domain gap between different data, former de-hazing methods usually adopt multiple datasets for explicit training, which often makes the methods themselves be violated. To address this problem, we propose a novel method of internal and external data augmentation to improve the existing dehazing methodology. By using cross-data external augmentor. The dataset inherits samples from different domains that are firmly aligned, making the model learn more robust and generalizable features. By using the internal data augmentation method, the model can fully exploit local information within the images, thereby obtaining more image details. To demonstrate the effectiveness of our proposed method, we conduct training on both the Natural Image Dataset (NID) and the Remote Sensing Image Dataset (RSID). Experimental results show that our method clearly resolves the domain gap in different dehazing datasets and presents a new pipeline for joint training in the dehazing task. Our approach significantly outperforms other advanced methods in dehazing and produces dehazed images that are closest to real haze-free images. The code will be available at: https://github.com/wengzp1/ScaleUpDehazing
Read more7/23/2024

0
DehazeDCT: Towards Effective Non-Homogeneous Dehazing via Deformable Convolutional Transformer
Wei Dong, Han Zhou, Ruiyi Wang, Xiaohong Liu, Guangtao Zhai, Jun Chen
Image dehazing, a pivotal task in low-level vision, aims to restore the visibility and detail from hazy images. Many deep learning methods with powerful representation learning capability demonstrate advanced performance on non-homogeneous dehazing, however, these methods usually struggle with processing high-resolution images (e.g., $4000 times 6000$) due to their heavy computational demands. To address these challenges, we introduce an innovative non-homogeneous Dehazing method via Deformable Convolutional Transformer-like architecture (DehazeDCT). Specifically, we first design a transformer-like network based on deformable convolution v4, which offers long-range dependency and adaptive spatial aggregation capabilities and demonstrates faster convergence and forward speed. Furthermore, we leverage a lightweight Retinex-inspired transformer to achieve color correction and structure refinement. Extensive experiment results and highly competitive performance of our method in NTIRE 2024 Dense and Non-Homogeneous Dehazing Challenge, ranking second among all 16 submissions, demonstrate the superior capability of our proposed method. The code is available: https://github.com/movingforward100/Dehazing_R.
Read more7/9/2024