Dynamic Adversarial Attacks on Autonomous Driving Systems
2312.06701
0
0
Abstract
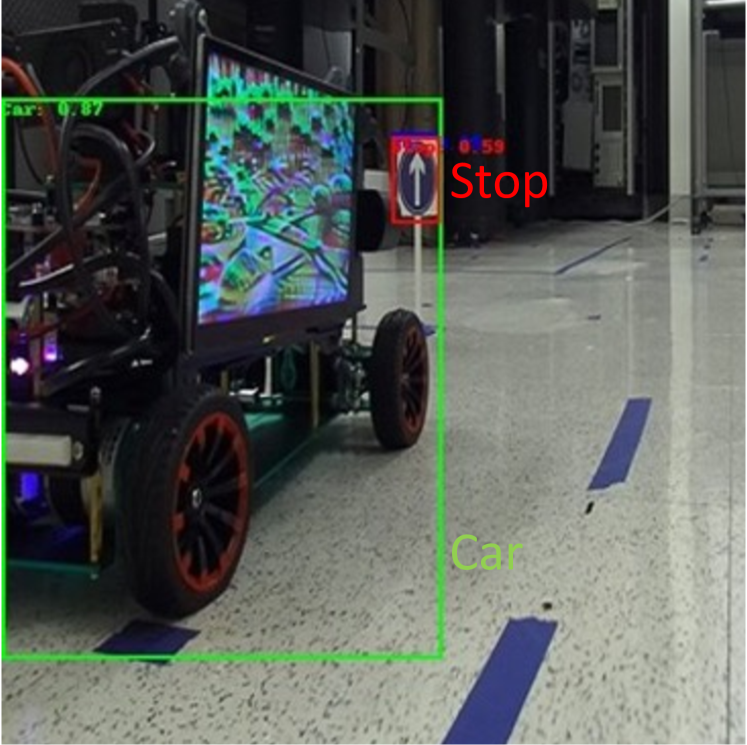
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Create account to get full access
Overview
- This paper presents a study on dynamic adversarial attacks on autonomous driving systems.
- The researchers developed a method to generate adversarial perturbations that can fool self-driving car perception models in real-time.
- The proposed approach aims to overcome limitations of previous static adversarial attacks by accounting for the dynamic nature of autonomous driving scenarios.
Plain English Explanation
Self-driving cars use advanced perception models to make sense of their surroundings and navigate safely. However, these models can be vulnerable to adversarial attacks - subtle changes to the environment that cause the car to misinterpret its surroundings. Previous research has shown that static adversarial attacks, where the attacker makes fixed changes to the environment, can fool self-driving car systems.
This paper takes the next step by developing a method for dynamic adversarial attacks - attacks that change over time to match the car's movement and perception. The key insight is that autonomous driving is a dynamic process, so attacks need to adapt accordingly to remain effective.
The researchers demonstrate how their approach can be used to trick self-driving car perception models in real-time, for example by causing the car to misidentify road signs or other critical objects. This is a significant advancement over previous static attacks, as it more realistically captures the challenges of securing autonomous vehicles in the real world.
Technical Explanation
The researchers formulate the dynamic adversarial attack problem as a constrained optimization task. The goal is to find small perturbations to the environment that can be applied over time to maximize the error in the self-driving car's perception.
They model the autonomous vehicle as a Partially Observable Markov Decision Process (POMDP), where the car's observations (camera, lidar, etc.) and actions (steering, acceleration) evolve over a sequence of time steps. The attacker's objective is to generate a series of perturbations that, when applied to the environment, will cause the car's perception model to make incorrect predictions about its surroundings.
The researchers develop a differentiable surrogate model of the self-driving car's perception system, which allows them to efficiently optimize the adversarial perturbations using gradient-based techniques. They validate their approach through extensive experiments on photorealistic autonomous driving simulators, demonstrating its effectiveness at fooling state-of-the-art perception models.
Critical Analysis
The paper makes an important contribution by considering the dynamic nature of autonomous driving, which is a crucial aspect for developing robust security measures. However, the proposed attack method has some limitations:
-
The approach assumes the attacker has full knowledge of the self-driving car's perception model, which may not always be the case in practice. Further research is needed to explore black-box attack scenarios.
-
The experiments are conducted in simulation, and it remains to be seen how well the dynamic adversarial attacks would translate to the physical world, where there are additional real-world constraints and uncertainties.
-
The paper does not discuss potential countermeasures or defense strategies against the proposed attacks. Exploring techniques to detect and mitigate dynamic adversarial threats is an important next step.
Overall, this work highlights the need for holistic security considerations in the design and deployment of autonomous driving systems, going beyond static adversarial attacks to address the dynamic nature of real-world driving scenarios.
Conclusion
This paper presents a novel approach for generating dynamic adversarial attacks on autonomous driving systems. By accounting for the evolving nature of autonomous vehicle perception and the environment, the researchers demonstrate how their method can fool state-of-the-art self-driving car models in real-time.
The findings underscore the importance of developing comprehensive security measures for autonomous vehicles, which must go beyond defending against static adversarial threats. As autonomous driving technology continues to advance, further research is needed to explore the full spectrum of dynamic attack scenarios and devise effective countermeasures to ensure the safety and reliability of self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
ControlLoc: Physical-World Hijacking Attack on Visual Perception in Autonomous Driving
Chen Ma, Ningfei Wang, Zhengyu Zhao, Qian Wang, Qi Alfred Chen, Chao Shen
0
0
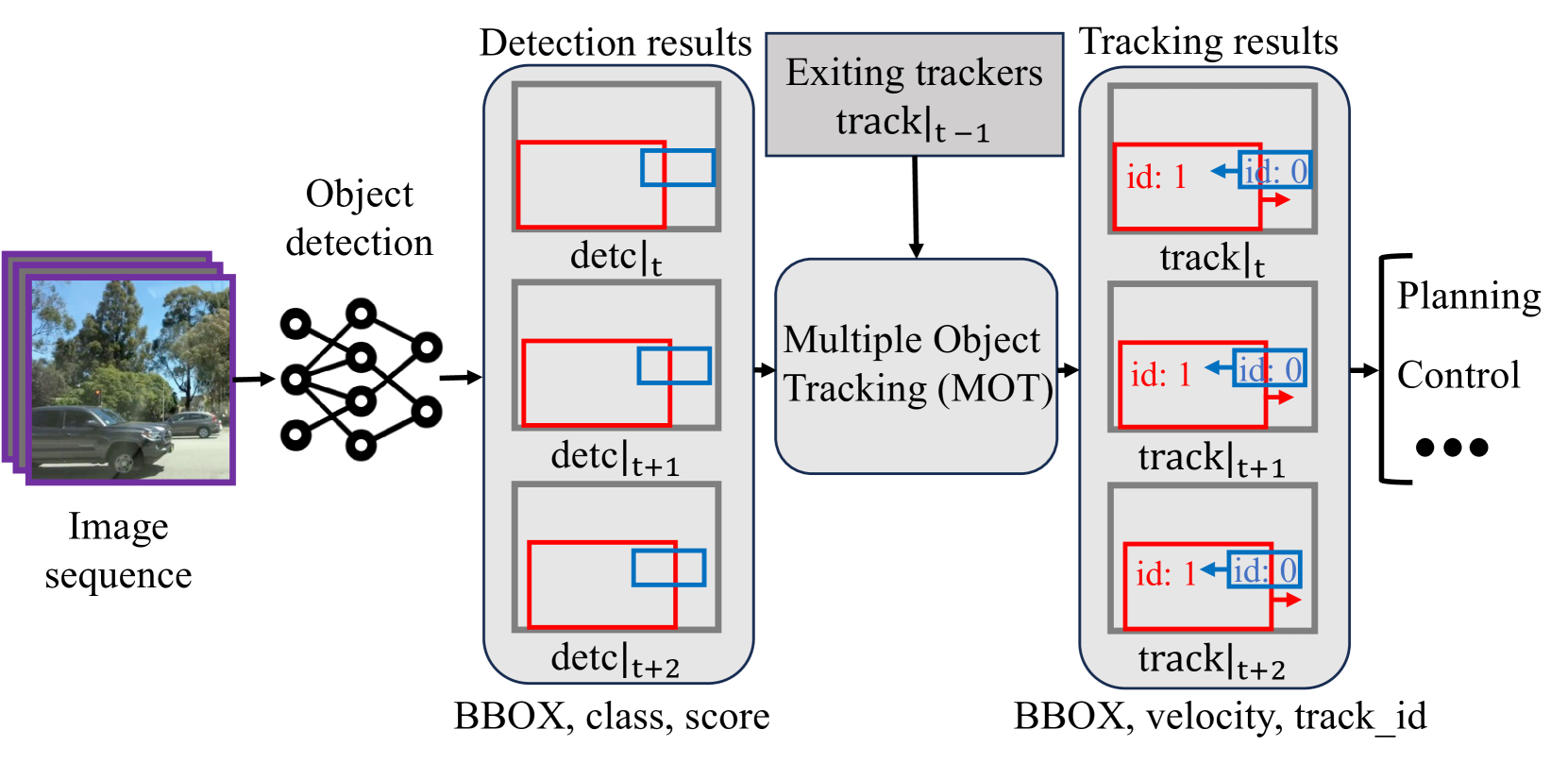
Recent research in adversarial machine learning has focused on visual perception in Autonomous Driving (AD) and has shown that printed adversarial patches can attack object detectors. However, it is important to note that AD visual perception encompasses more than just object detection; it also includes Multiple Object Tracking (MOT). MOT enhances the robustness by compensating for object detection errors and requiring consistent object detection results across multiple frames before influencing tracking results and driving decisions. Thus, MOT makes attacks on object detection alone less effective. To attack such robust AD visual perception, a digital hijacking attack has been proposed to cause dangerous driving scenarios. However, this attack has limited effectiveness. In this paper, we introduce a novel physical-world adversarial patch attack, ControlLoc, designed to exploit hijacking vulnerabilities in entire AD visual perception. ControlLoc utilizes a two-stage process: initially identifying the optimal location for the adversarial patch, and subsequently generating the patch that can modify the perceived location and shape of objects with the optimal location. Extensive evaluations demonstrate the superior performance of ControlLoc, achieving an impressive average attack success rate of around 98.1% across various AD visual perceptions and datasets, which is four times greater effectiveness than the existing hijacking attack. The effectiveness of ControlLoc is further validated in physical-world conditions, including real vehicle tests under different conditions such as outdoor light conditions with an average attack success rate of 77.5%. AD system-level impact assessments are also included, such as vehicle collision, using industry-grade AD systems and production-grade AD simulators with an average vehicle collision rate and unnecessary emergency stop rate of 81.3%.
6/11/2024

Searching Realistic-Looking Adversarial Objects For Autonomous Driving Systems
Shengxiang Sun, Shenzhe Zhu
0
0
Numerous studies on adversarial attacks targeting self-driving policies fail to incorporate realistic-looking adversarial objects, limiting real-world applicability. Building upon prior research that facilitated the transition of adversarial objects from simulations to practical applications, this paper discusses a modified gradient-based texture optimization method to discover realistic-looking adversarial objects. While retaining the core architecture and techniques of the prior research, the proposed addition involves an entity termed the 'Judge'. This agent assesses the texture of a rendered object, assigning a probability score reflecting its realism. This score is integrated into the loss function to encourage the NeRF object renderer to concurrently learn realistic and adversarial textures. The paper analyzes four strategies for developing a robust 'Judge': 1) Leveraging cutting-edge vision-language models. 2) Fine-tuning open-sourced vision-language models. 3) Pretraining neurosymbolic systems. 4) Utilizing traditional image processing techniques. Our findings indicate that strategies 1) and 4) yield less reliable outcomes, pointing towards strategies 2) or 3) as more promising directions for future research.
5/21/2024

Model Agnostic Defense against Adversarial Patch Attacks on Object Detection in Unmanned Aerial Vehicles
Saurabh Pathak, Samridha Shrestha, Abdelrahman AlMahmoud
0
0
Object detection forms a key component in Unmanned Aerial Vehicles (UAVs) for completing high-level tasks that depend on the awareness of objects on the ground from an aerial perspective. In that scenario, adversarial patch attacks on an onboard object detector can severely impair the performance of upstream tasks. This paper proposes a novel model-agnostic defense mechanism against the threat of adversarial patch attacks in the context of UAV-based object detection. We formulate adversarial patch defense as an occlusion removal task. The proposed defense method can neutralize adversarial patches located on objects of interest, without exposure to adversarial patches during training. Our lightweight single-stage defense approach allows us to maintain a model-agnostic nature, that once deployed does not require to be updated in response to changes in the object detection pipeline. The evaluations in digital and physical domains show the feasibility of our method for deployment in UAV object detection pipelines, by significantly decreasing the Attack Success Ratio without incurring significant processing costs. As a result, the proposed defense solution can improve the reliability of object detection for UAVs.
5/30/2024
🔎
Towards Robust Physical-world Backdoor Attacks on Lane Detection
Xinwei Zhang, Aishan Liu, Tianyuan Zhang, Siyuan Liang, Xianglong Liu
0
0
Deep learning-based lane detection (LD) plays a critical role in autonomous driving systems, such as adaptive cruise control. However, it is vulnerable to backdoor attacks. Existing backdoor attack methods on LD exhibit limited effectiveness in dynamic real-world scenarios, primarily because they fail to consider dynamic scene factors, including changes in driving perspectives (e.g., viewpoint transformations) and environmental conditions (e.g., weather or lighting changes). To tackle this issue, this paper introduces BadLANE, a dynamic scene adaptation backdoor attack for LD designed to withstand changes in real-world dynamic scene factors. To address the challenges posed by changing driving perspectives, we propose an amorphous trigger pattern composed of shapeless pixels. This trigger design allows the backdoor to be activated by various forms or shapes of mud spots or pollution on the road or lens, enabling adaptation to changes in vehicle observation viewpoints during driving. To mitigate the effects of environmental changes, we design a meta-learning framework to train meta-generators tailored to different environmental conditions. These generators produce meta-triggers that incorporate diverse environmental information, such as weather or lighting conditions, as the initialization of the trigger patterns for backdoor implantation, thus enabling adaptation to dynamic environments. Extensive experiments on various commonly used LD models in both digital and physical domains validate the effectiveness of our attacks, outperforming other baselines significantly (+25.15% on average in Attack Success Rate). Our codes will be available upon paper publication.
6/5/2024