Searching Realistic-Looking Adversarial Objects For Autonomous Driving Systems

0

Sign in to get full access
Overview
- This research paper explores the potential for everyday objects to possess both realistic and adversarial characteristics, which could be used to fool autonomous driving systems.
- The researchers hypothesize that many real-world objects can be designed or modified to have subtle features that cause autonomous vehicles to misclassify or misinterpret them, potentially leading to safety issues.
- The paper aims to develop techniques for searching for and generating these "realistic-looking adversarial objects" to better understand the vulnerabilities of autonomous driving systems.
Plain English Explanation
Self-driving cars use advanced computer vision and machine learning algorithms to detect and classify objects in their environment, such as other vehicles, pedestrians, and infrastructure. However, these systems can be vulnerable to adversarial attacks, where intentionally designed or modified objects can confuse the algorithms and cause the car to make incorrect decisions.
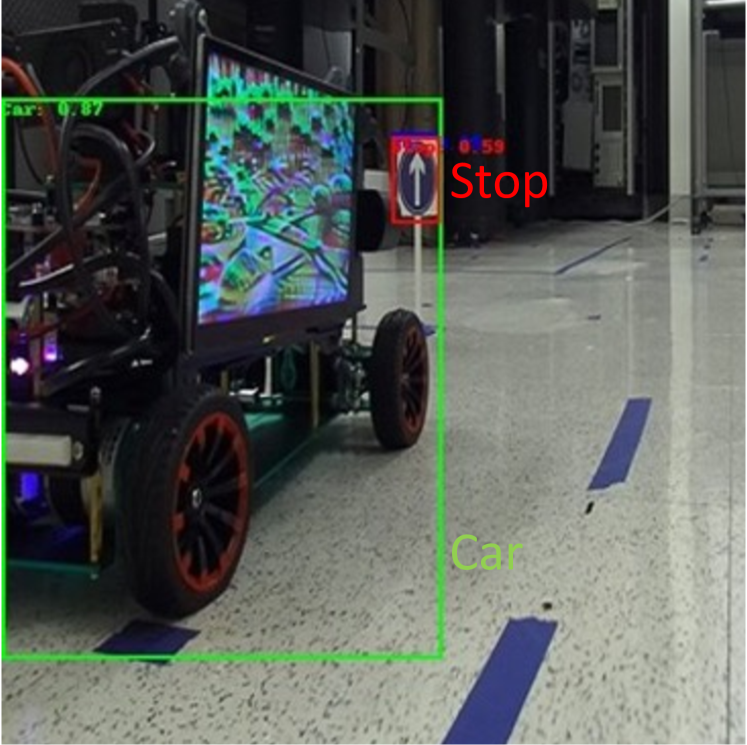
The researchers in this paper propose that many everyday objects, such as signs, trash cans, or even pebbles, could be designed or altered to have subtle features that make them appear realistic to a human, but cause an autonomous vehicle to misidentify or misinterpret them. For example, a stop sign could be modified in a way that makes it look normal to a person, but the self-driving car's vision system might see it as a different type of sign, potentially leading the car to fail to stop as expected.
The goal of this research is to develop techniques to systematically search for and generate these "realistic-looking adversarial objects" to better understand the vulnerabilities of autonomous driving systems. By identifying such objects, the researchers hope to help improve the robustness and safety of self-driving car technology.
Technical Explanation
The key hypothesis of this paper is that many real-world objects can possess both realistic and adversarial characteristics, which could be used to fool autonomous driving systems. The researchers propose a framework for searching for and generating these "realistic-looking adversarial objects" that leverage the inherent limitations and biases of self-driving car perception models.
The paper outlines a multi-stage process for identifying and creating these adversarial objects. First, the researchers collect a dataset of realistic-looking everyday objects, such as infrared adversarial car stickers or adversarial AI art. They then develop optimization techniques to systematically modify the objects in a way that preserves their realistic appearance to humans but introduces subtle perturbations that cause autonomous vehicle perception models to misclassify them.
The paper presents several case studies demonstrating the effectiveness of their approach, including examples of modified stop signs, speed limit signs, and other objects that are able to evade detection or cause misclassification by state-of-the-art self-driving car systems. The researchers also discuss the implications of their findings for the development of more robust and secure autonomous driving technologies.
Critical Analysis
While the research presented in this paper is thought-provoking and highlights important vulnerabilities in current autonomous driving systems, there are some potential limitations and areas for further exploration.
One key concern is the extent to which the generated "realistic-looking adversarial objects" would actually be feasible and practical to deploy in real-world driving scenarios. The researchers acknowledge that their examples may not withstand rigorous real-world testing and that significant engineering challenges would need to be overcome to create adversarial objects that could reliably fool self-driving cars in complex, dynamic environments.
Additionally, the paper focuses primarily on the vulnerabilities of computer vision systems, but autonomous vehicles also rely on a range of other sensors and technologies, such as LIDAR and radar, which may be less susceptible to the types of adversarial attacks described. Further research is needed to evaluate the broader robustness of autonomous driving systems and explore mitigation strategies that go beyond just vision-based perception.
Nevertheless, this research serves as an important reminder of the need for continued vigilance and innovation in the development of safe and secure autonomous driving technologies. By proactively identifying and addressing vulnerabilities, the field can work towards more robust and resilient self-driving systems that can better withstand real-world challenges and threats.
Conclusion
This research paper presents a novel approach for searching for and generating "realistic-looking adversarial objects" that could potentially be used to fool autonomous driving systems. The key hypothesis is that many everyday objects can be designed or modified to have subtle features that preserve their realistic appearance to humans but cause self-driving car perception models to misclassify or misinterpret them.
While the specific examples provided in the paper may not be directly translatable to real-world driving scenarios, the overall approach highlights important vulnerabilities in current autonomous vehicle technologies. As the field of self-driving cars continues to evolve, this research underscores the need for ongoing vigilance, comprehensive testing, and the development of more robust and secure perception systems that can withstand a wide range of potential threats and adversarial attacks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Searching Realistic-Looking Adversarial Objects For Autonomous Driving Systems
Shengxiang Sun, Shenzhe Zhu
Numerous studies on adversarial attacks targeting self-driving policies fail to incorporate realistic-looking adversarial objects, limiting real-world applicability. Building upon prior research that facilitated the transition of adversarial objects from simulations to practical applications, this paper discusses a modified gradient-based texture optimization method to discover realistic-looking adversarial objects. While retaining the core architecture and techniques of the prior research, the proposed addition involves an entity termed the 'Judge'. This agent assesses the texture of a rendered object, assigning a probability score reflecting its realism. This score is integrated into the loss function to encourage the NeRF object renderer to concurrently learn realistic and adversarial textures. The paper analyzes four strategies for developing a robust 'Judge': 1) Leveraging cutting-edge vision-language models. 2) Fine-tuning open-sourced vision-language models. 3) Pretraining neurosymbolic systems. 4) Utilizing traditional image processing techniques. Our findings indicate that strategies 1) and 4) yield less reliable outcomes, pointing towards strategies 2) or 3) as more promising directions for future research.
Read more5/21/2024
🔎
0
Adv3D: Generating 3D Adversarial Examples for 3D Object Detection in Driving Scenarios with NeRF
Leheng Li, Qing Lian, Ying-Cong Chen
Deep neural networks (DNNs) have been proven extremely susceptible to adversarial examples, which raises special safety-critical concerns for DNN-based autonomous driving stacks (i.e., 3D object detection). Although there are extensive works on image-level attacks, most are restricted to 2D pixel spaces, and such attacks are not always physically realistic in our 3D world. Here we present Adv3D, the first exploration of modeling adversarial examples as Neural Radiance Fields (NeRFs). Advances in NeRF provide photorealistic appearances and 3D accurate generation, yielding a more realistic and realizable adversarial example. We train our adversarial NeRF by minimizing the surrounding objects' confidence predicted by 3D detectors on the training set. Then we evaluate Adv3D on the unseen validation set and show that it can cause a large performance reduction when rendering NeRF in any sampled pose. To generate physically realizable adversarial examples, we propose primitive-aware sampling and semantic-guided regularization that enable 3D patch attacks with camouflage adversarial texture. Experimental results demonstrate that the trained adversarial NeRF generalizes well to different poses, scenes, and 3D detectors. Finally, we provide a defense method to our attacks that involves adversarial training through data augmentation. Project page: https://len-li.github.io/adv3d-web
Read more8/7/2024
0
Dynamic Adversarial Attacks on Autonomous Driving Systems
Amirhosein Chahe, Chenan Wang, Abhishek Jeyapratap, Kaidi Xu, Lifeng Zhou
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Read more5/16/2024

0
Towards Physically-Realizable Adversarial Attacks in Embodied Vision Navigation
Meng Chen, Jiawei Tu, Chao Qi, Yonghao Dang, Feng Zhou, Wei Wei, Jianqin Yin
The deployment of embodied navigation agents in safety-critical environments raises concerns about their vulnerability to adversarial attacks on deep neural networks. However, current attack methods often lack practicality due to challenges in transitioning from the digital to the physical world, while existing physical attacks for object detection fail to achieve both multi-view effectiveness and naturalness. To address this, we propose a practical attack method for embodied navigation by attaching adversarial patches with learnable textures and opacity to objects. Specifically, to ensure effectiveness across varying viewpoints, we employ a multi-view optimization strategy based on object-aware sampling, which uses feedback from the navigation model to optimize the patch's texture. To make the patch inconspicuous to human observers, we introduce a two-stage opacity optimization mechanism, where opacity is refined after texture optimization. Experimental results show our adversarial patches reduce navigation success rates by about 40%, outperforming previous methods in practicality, effectiveness, and naturalness. Code is available at: [https://github.com/chen37058/Physical-Attacks-in-Embodied-Navigation].
Read more9/20/2024