Dynamic LiDAR Re-simulation using Compositional Neural Fields

0

Sign in to get full access
Overview
- This paper introduces a novel approach for dynamic LiDAR re-simulation using compositional neural fields.
- It builds on recent advancements in neural radiance fields (NeRFs) to enable realistic re-simulation of LiDAR data, capturing both static and dynamic scene elements.
- The key innovations include a compositional scene representation and a rendering pipeline that can handle both static and dynamic components.
Plain English Explanation
The researchers have developed a new way to realistically recreate LiDAR sensor data. LiDAR is a technology that uses lasers to map out 3D environments, and it's commonly used in autonomous vehicles and robotics. However, collecting real-world LiDAR data can be expensive and time-consuming.
This paper presents a solution that uses machine learning to synthesize realistic LiDAR data. It builds on a technique called neural radiance fields (NeRFs), which can create 3D models from 2D images. The researchers extended NeRFs to handle both static and dynamic scene elements, allowing them to re-simulate the full 3D LiDAR point cloud, including moving objects.
The key idea is to break down the scene into smaller, composable elements that can be independently represented and rendered. This enables the model to capture complex real-world environments with both stationary and moving components. The researchers demonstrated their approach on several real-world LiDAR datasets, showing that it can generate highly realistic LiDAR scans.
Technical Explanation
The paper proposes a method for dynamic LiDAR re-simulation using a compositional neural field representation. It builds on the success of neural radiance fields (NeRFs) for static 3D scene reconstruction from 2D images.
The core technical contributions include:
-
Compositional Neural Fields: The scene is represented as a composition of multiple neural fields, each capturing a specific static or dynamic component (e.g., background, moving vehicles, pedestrians). This allows the model to handle complex real-world environments with both stationary and moving elements.
-
Dynamic Rendering Pipeline: The authors develop a rendering pipeline that can handle the compositional neural field representation, enabling realistic re-simulation of LiDAR scans with both static and dynamic scene elements.
-
Evaluation on Real-world Datasets: The method is evaluated on several real-world LiDAR datasets, demonstrating its ability to generate highly realistic LiDAR point clouds that capture the static and dynamic aspects of the original scenes.
The paper builds on related work in neural implicit representations, such as Neural Implicit Representation for Building Digital Twins of the Unknown, and advances in visual state space models for remote sensing, like RS3MAMBA: Visual State Space Model for Remote Sensing. It also relates to research on radar ghost objects, as described in Radar Ghost Dataset for Evaluation of Ghost Objects in Automotive.
Critical Analysis
The paper presents a promising approach for dynamic LiDAR re-simulation, but there are a few potential limitations and areas for further research:
-
Scalability: The compositional neural field representation may face challenges when scaling to extremely complex, large-scale environments with a vast number of dynamic elements. Further research is needed to understand the practical limits of this approach.
-
Generalization: While the method is evaluated on real-world datasets, its ability to generalize to unseen environments or handle rare or unusual scene elements is not fully explored. Investigating the model's robustness and adaptability would be valuable.
-
Computational Efficiency: The rendering pipeline required for the compositional neural fields may be computationally intensive, especially for real-time applications. Exploring ways to optimize the inference and rendering process could enhance the practical applicability of this approach.
-
Integration with Other Modalities: The paper focuses solely on LiDAR data, but integrating this technique with other sensor modalities, such as cameras or radar, could lead to more comprehensive and accurate digital twins of real-world environments. Exploring multimodal extensions would be an interesting direction for future research.
Overall, the paper presents an innovative approach to dynamic LiDAR re-simulation that could have significant implications for various applications, such as autonomous vehicles, robotics, and digital twin development. Further research and refinement of the proposed techniques could lead to even more robust and versatile solutions for realistic scene reconstruction and simulation.
Conclusion
This paper introduces a novel method for dynamic LiDAR re-simulation using a compositional neural field representation. By breaking down the scene into modular components, the approach can realistically capture both static and dynamic elements, enabling the generation of highly realistic LiDAR point clouds.
The key technical contributions, including the compositional neural fields and the dynamic rendering pipeline, demonstrate the potential of this approach to address the challenges of obtaining real-world LiDAR data for various applications, such as autonomous driving, robotics, and digital twin development. While the paper highlights some areas for further research, such as scalability and computational efficiency, the overall approach represents an exciting advancement in the field of 3D scene understanding and simulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Dynamic LiDAR Re-simulation using Compositional Neural Fields
Hanfeng Wu, Xingxing Zuo, Stefan Leutenegger, Or Litany, Konrad Schindler, Shengyu Huang
We introduce DyNFL, a novel neural field-based approach for high-fidelity re-simulation of LiDAR scans in dynamic driving scenes. DyNFL processes LiDAR measurements from dynamic environments, accompanied by bounding boxes of moving objects, to construct an editable neural field. This field, comprising separately reconstructed static background and dynamic objects, allows users to modify viewpoints, adjust object positions, and seamlessly add or remove objects in the re-simulated scene. A key innovation of our method is the neural field composition technique, which effectively integrates reconstructed neural assets from various scenes through a ray drop test, accounting for occlusions and transparent surfaces. Our evaluation with both synthetic and real-world environments demonstrates that DyNFL substantially improves dynamic scene LiDAR simulation, offering a combination of physical fidelity and flexible editing capabilities.
Read more4/4/2024

0
LiDAR4D: Dynamic Neural Fields for Novel Space-time View LiDAR Synthesis
Zehan Zheng, Fan Lu, Weiyi Xue, Guang Chen, Changjun Jiang
Although neural radiance fields (NeRFs) have achieved triumphs in image novel view synthesis (NVS), LiDAR NVS remains largely unexplored. Previous LiDAR NVS methods employ a simple shift from image NVS methods while ignoring the dynamic nature and the large-scale reconstruction problem of LiDAR point clouds. In light of this, we propose LiDAR4D, a differentiable LiDAR-only framework for novel space-time LiDAR view synthesis. In consideration of the sparsity and large-scale characteristics, we design a 4D hybrid representation combined with multi-planar and grid features to achieve effective reconstruction in a coarse-to-fine manner. Furthermore, we introduce geometric constraints derived from point clouds to improve temporal consistency. For the realistic synthesis of LiDAR point clouds, we incorporate the global optimization of ray-drop probability to preserve cross-region patterns. Extensive experiments on KITTI-360 and NuScenes datasets demonstrate the superiority of our method in accomplishing geometry-aware and time-consistent dynamic reconstruction. Codes are available at https://github.com/ispc-lab/LiDAR4D.
Read more4/4/2024
🧠
0
3D LiDAR Mapping in Dynamic Environments Using a 4D Implicit Neural Representation
Xingguang Zhong, Yue Pan, Cyrill Stachniss, Jens Behley
Building accurate maps is a key building block to enable reliable localization, planning, and navigation of autonomous vehicles. We propose a novel approach for building accurate maps of dynamic environments utilizing a sequence of LiDAR scans. To this end, we propose encoding the 4D scene into a novel spatio-temporal implicit neural map representation by fitting a time-dependent truncated signed distance function to each point. Using our representation, we extract the static map by filtering the dynamic parts. Our neural representation is based on sparse feature grids, a globally shared decoder, and time-dependent basis functions, which we jointly optimize in an unsupervised fashion. To learn this representation from a sequence of LiDAR scans, we design a simple yet efficient loss function to supervise the map optimization in a piecewise way. We evaluate our approach on various scenes containing moving objects in terms of the reconstruction quality of static maps and the segmentation of dynamic point clouds. The experimental results demonstrate that our method is capable of removing the dynamic part of the input point clouds while reconstructing accurate and complete 3D maps, outperforming several state-of-the-art methods. Codes are available at: https://github.com/PRBonn/4dNDF
Read more5/7/2024
0
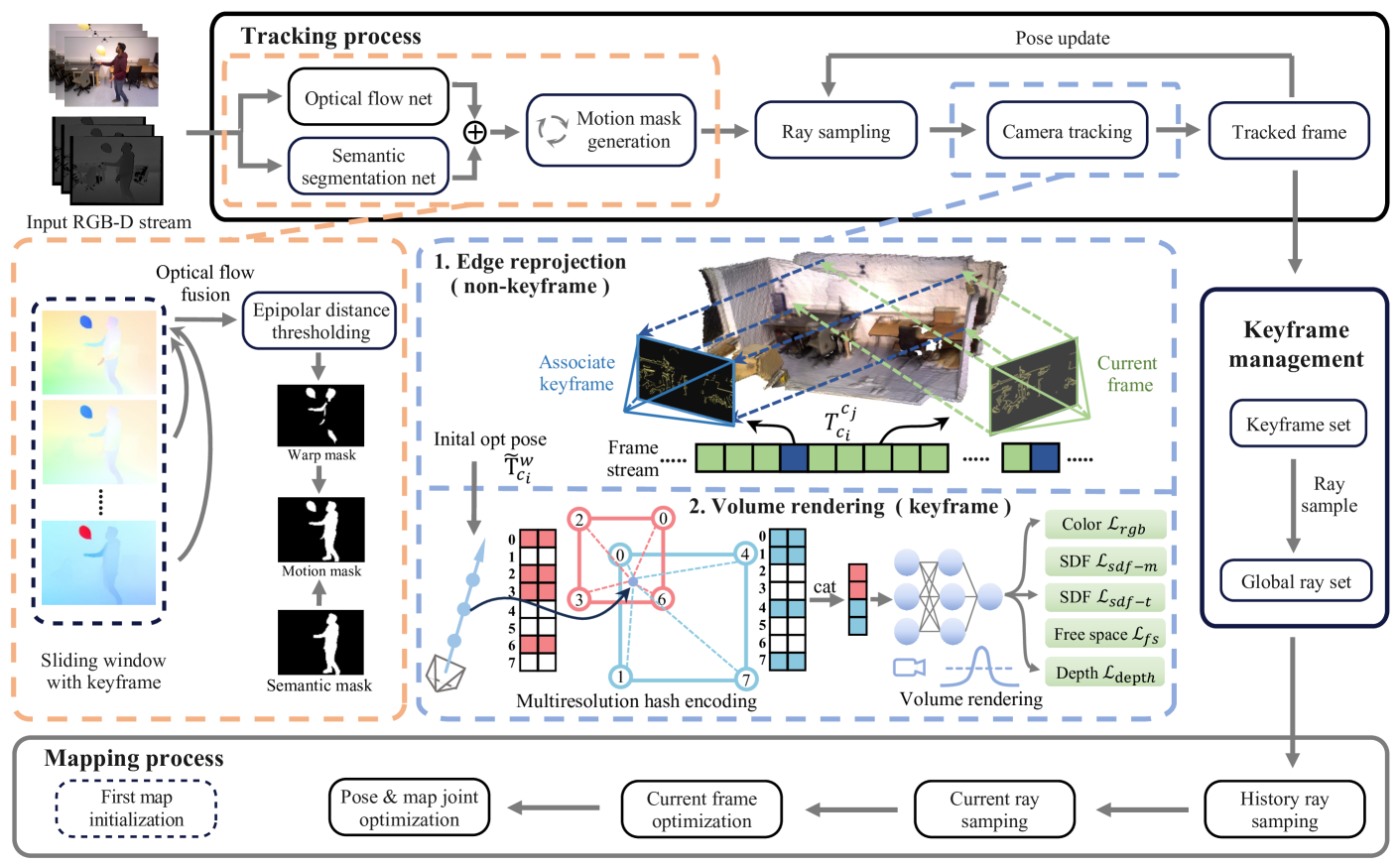
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Read more7/2/2024