RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
2407.01303
0
0
Abstract
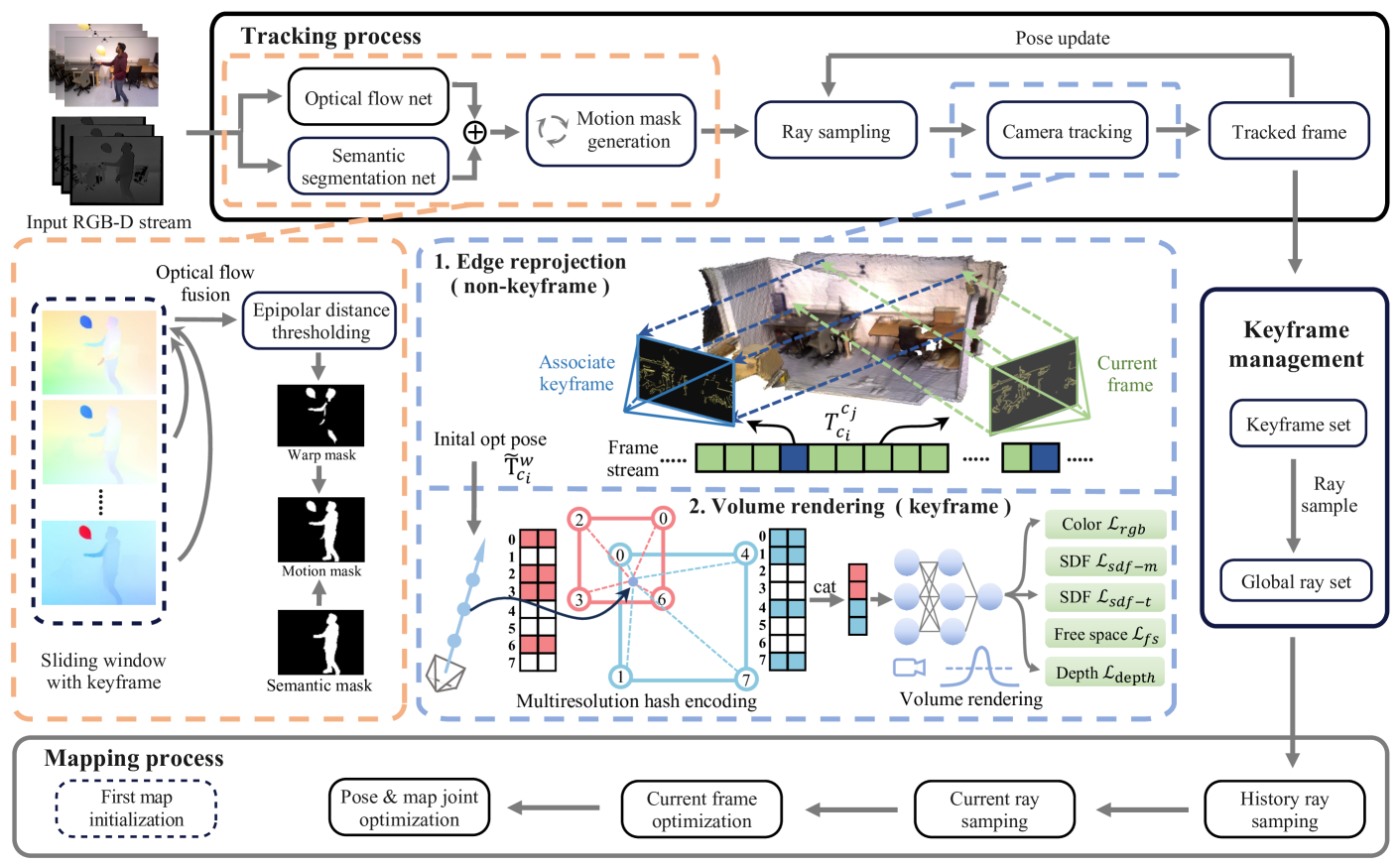
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Create account to get full access
Overview
- This paper presents RoDyn-SLAM, a robust dynamic dense RGB-D SLAM (Simultaneous Localization and Mapping) system that uses neural radiance fields to handle dynamic environments.
- RoDyn-SLAM can accurately estimate camera poses and reconstruct both static and dynamic scenes in real-time.
- The system leverages neural radiance fields to model the scene's appearance and dynamics, allowing it to handle complex dynamic environments.
Plain English Explanation
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields is a new way to do 3D mapping and camera tracking that works well even when there are moving objects in the scene. Traditional SLAM systems can struggle with dynamic environments, but this new approach uses a technique called "neural radiance fields" to model both the static and moving parts of the scene.
The key idea is to represent the scene using a neural network that can learn the appearance and behavior of the environment, including any moving objects. This allows the system to accurately estimate the camera's position and orientation (pose) and reconstruct a detailed 3D map of the scene, even when there are people, animals, or other things moving around.
Compared to previous methods, RoDyn-SLAM is more "robust" or reliable at handling dynamic scenes. It can work in real-time, updating the map and camera pose as the scene changes. This could be useful for applications like augmented reality, robotics, or 3D scanning where you want to capture an environment accurately even when it's not completely static.
Technical Explanation
RoDyn-SLAM is a Simultaneous Localization and Mapping (SLAM) system that uses neural radiance fields to model both static and dynamic elements of a scene. The key innovation is the use of a neural radiance field to represent the environment, which allows the system to handle complex dynamic scenes in real-time.
The system takes in RGB-D (color and depth) video data from a camera and simultaneously estimates the camera's 6-DoF (degree of freedom) pose and reconstructs a detailed 3D map of the environment. Unlike traditional SLAM approaches that struggle with dynamic elements, RoDyn-SLAM can accurately model both static and moving objects using the neural radiance field.
The neural radiance field is a learned representation that encodes the appearance and behavior of the scene. It allows the system to reason about occlusions, shadows, and other complex visual phenomena that occur in dynamic environments. By integrating this neural radiance field into the SLAM pipeline, RoDyn-SLAM can robustly track camera pose and build high-quality 3D maps even in the presence of moving objects.
The authors evaluate RoDyn-SLAM on several dynamic RGB-D datasets and demonstrate its superior performance compared to state-of-the-art SLAM and NeRF methods. The system is able to achieve real-time performance while producing detailed, consistent 3D reconstructions of dynamic scenes.
Critical Analysis
The paper presents a promising approach for handling dynamic environments in SLAM systems, but there are a few potential limitations and areas for further research:
-
Computational Complexity: The use of a neural radiance field adds significant computational overhead compared to traditional SLAM methods. While the authors demonstrate real-time performance, the system may struggle to scale to larger or more complex scenes.
-
Dependence on Depth Data: RoDyn-SLAM relies on having access to reliable depth information, which may not always be available, especially in outdoor or challenging environments. Exploring ways to adapt the system to work with monocular or sparse depth data could broaden its applicability.
-
Generalization to Unseen Dynamics: The paper focuses on evaluating RoDyn-SLAM on pre-recorded datasets with known dynamic elements. It would be valuable to understand how well the system generalizes to previously unseen types of dynamic motion or unanticipated scene changes.
-
Sensitivity to Initialization: As with many neural network-based approaches, the performance of RoDyn-SLAM may be sensitive to the initialization of the neural radiance field. Investigating more robust initialization strategies could improve the system's reliability.
Overall, RoDyn-SLAM represents an important step forward in dynamic SLAM, but further research is needed to address these potential limitations and expand the system's capabilities for real-world applications.
Conclusion
RoDyn-SLAM presents a novel approach to Simultaneous Localization and Mapping that can handle dynamic environments by leveraging neural radiance fields. This allows the system to accurately estimate camera poses and reconstruct detailed 3D maps of scenes with moving objects, which is a significant advancement over traditional SLAM methods.
The use of neural radiance fields to model both static and dynamic scene elements is a key innovation that enables RoDyn-SLAM to be more robust and reliable in real-world conditions. While the system has some computational and dependence on depth data limitations, the authors have demonstrated its strong performance on dynamic RGB-D datasets.
Overall, RoDyn-SLAM represents an important step forward in the field of SLAM, with the potential to enable a wide range of applications, from augmented reality and robotics to 3D scanning and reconstruction, where accurate tracking and mapping of dynamic environments is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

NID-SLAM: Neural Implicit Representation-based RGB-D SLAM in dynamic environments
Ziheng Xu, Jianwei Niu, Qingfeng Li, Tao Ren, Chen Chen
0
0
Neural implicit representations have been explored to enhance visual SLAM algorithms, especially in providing high-fidelity dense map. Existing methods operate robustly in static scenes but struggle with the disruption caused by moving objects. In this paper we present NID-SLAM, which significantly improves the performance of neural SLAM in dynamic environments. We propose a new approach to enhance inaccurate regions in semantic masks, particularly in marginal areas. Utilizing the geometric information present in depth images, this method enables accurate removal of dynamic objects, thereby reducing the probability of camera drift. Additionally, we introduce a keyframe selection strategy for dynamic scenes, which enhances camera tracking robustness against large-scale objects and improves the efficiency of mapping. Experiments on publicly available RGB-D datasets demonstrate that our method outperforms competitive neural SLAM approaches in tracking accuracy and mapping quality in dynamic environments.
5/17/2024

EC-SLAM: Real-time Dense Neural RGB-D SLAM System with Effectively Constrained Global Bundle Adjustment
Guanghao Li, Qi Chen, YuXiang Yan, Jian Pu
0
0
We introduce EC-SLAM, a real-time dense RGB-D simultaneous localization and mapping (SLAM) system utilizing Neural Radiance Fields (NeRF). Although recent NeRF-based SLAM systems have demonstrated encouraging outcomes, they have yet to completely leverage NeRF's capability to constrain pose optimization. By employing an effectively constrained global bundle adjustment (BA) strategy, our system makes use of NeRF's implicit loop closure correction capability. This improves the tracking accuracy by reinforcing the constraints on the keyframes that are most pertinent to the optimized current frame. In addition, by implementing a feature-based and uniform sampling strategy that minimizes the number of ineffective constraint points for pose optimization, we mitigate the effects of random sampling in NeRF. EC-SLAM utilizes sparse parametric encodings and the truncated signed distance field (TSDF) to represent the map in order to facilitate efficient fusion, resulting in reduced model parameters and accelerated convergence velocity. A comprehensive evaluation conducted on the Replica, ScanNet, and TUM datasets showcases cutting-edge performance, including enhanced reconstruction accuracy resulting from precise pose estimation, 21 Hz run time, and tracking precision improvements of up to 50%. The source code is available at https://github.com/Lightingooo/EC-SLAM.
4/23/2024
❗
GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM
Ganlin Zhang, Erik Sandstrom, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald
0
0
Recent advancements in RGB-only dense Simultaneous Localization and Mapping (SLAM) have predominantly utilized grid-based neural implicit encodings and/or struggle to efficiently realize global map and pose consistency. To this end, we propose an efficient RGB-only dense SLAM system using a flexible neural point cloud scene representation that adapts to keyframe poses and depth updates, without needing costly backpropagation. Another critical challenge of RGB-only SLAM is the lack of geometric priors. To alleviate this issue, with the aid of a monocular depth estimator, we introduce a novel DSPO layer for bundle adjustment which optimizes the pose and depth of keyframes along with the scale of the monocular depth. Finally, our system benefits from loop closure and online global bundle adjustment and performs either better or competitive to existing dense neural RGB SLAM methods in tracking, mapping and rendering accuracy on the Replica, TUM-RGBD and ScanNet datasets. The source code is available at https://github.com/zhangganlin/GlOIRE-SLAM
5/28/2024

Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
Huajian Huang, Longwei Li, Hui Cheng, Sai-Kit Yeung
0
0
The integration of neural rendering and the SLAM system recently showed promising results in joint localization and photorealistic view reconstruction. However, existing methods, fully relying on implicit representations, are so resource-hungry that they cannot run on portable devices, which deviates from the original intention of SLAM. In this paper, we present Photo-SLAM, a novel SLAM framework with a hyper primitives map. Specifically, we simultaneously exploit explicit geometric features for localization and learn implicit photometric features to represent the texture information of the observed environment. In addition to actively densifying hyper primitives based on geometric features, we further introduce a Gaussian-Pyramid-based training method to progressively learn multi-level features, enhancing photorealistic mapping performance. The extensive experiments with monocular, stereo, and RGB-D datasets prove that our proposed system Photo-SLAM significantly outperforms current state-of-the-art SLAM systems for online photorealistic mapping, e.g., PSNR is 30% higher and rendering speed is hundreds of times faster in the Replica dataset. Moreover, the Photo-SLAM can run at real-time speed using an embedded platform such as Jetson AGX Orin, showing the potential of robotics applications.
4/9/2024