DynaPix SLAM: A Pixel-Based Dynamic Visual SLAM Approach

0
💬
Sign in to get full access
Overview
- Visual SLAM (Simultaneous Localization and Mapping) methods can accurately track a camera's position and build a map of the environment in static scenes.
- However, these methods struggle in dynamic environments where moving objects affect the core SLAM modules.
- Existing dynamic SLAM approaches use semantic information, geometric constraints, or optical flow to handle moving objects, but they have limitations like imprecise estimations and reliance on deep learning models.
- To address these issues, the researchers introduce DynaPix, a novel semantic-free dynamic SLAM system that estimates per-pixel motion probabilities and improves the pose optimization process.
Plain English Explanation
The paper presents a new Visual SLAM system called DynaPix that can effectively handle dynamic scenes, where objects are moving around. Existing Visual SLAM methods work well in static environments, but struggle when there are moving objects because these objects can confuse the core SLAM algorithms.
To solve this problem, some researchers have tried using semantic information, geometric constraints, or optical flow to identify and exclude the moving objects. However, these approaches have their own limitations, such as relying on deep learning models that may not be accurate enough.
The DynaPix system takes a different approach. It estimates the probability that each pixel in the camera's view is part of a moving object, without using any semantic information. It does this by analyzing the camera's image data and optical flow (the movement of pixels between frames). DynaPix then uses these per-pixel motion probabilities to improve the core SLAM algorithms, like the ones that track the camera's position and build the map of the environment.
The researchers show that DynaPix significantly outperforms other dynamic SLAM approaches in terms of accuracy and the length of time the system can track the camera's location, even in complex dynamic scenes.
Technical Explanation
The key innovation in DynaPix is its approach to handling moving objects in the scene. Instead of relying on semantic information or predefined object classes, DynaPix estimates the probability that each individual pixel in the camera's view is part of a moving object.
To do this, DynaPix uses a static background differencing method on the image data to detect motion, and it also computes optical flow between the camera frames. It then combines these two sources of information to calculate a per-pixel motion probability.
DynaPix fully integrates these motion probabilities into the map point selection and the weighted bundle adjustment process of the ORB-SLAM2 algorithm. This allows DynaPix to effectively track the camera's position and build a map of the environment, even in the presence of moving objects.
The researchers evaluated DynaPix using the GRADE and TUM RGB-D datasets, which contain both static and dynamic scenes. They found that DynaPix significantly outperformed other dynamic SLAM approaches in terms of trajectory error and tracking time, demonstrating its effectiveness in handling complex dynamic environments.
Critical Analysis
The DynaPix approach addresses important limitations of existing dynamic SLAM methods. By avoiding the use of semantic information and predefined object classes, DynaPix is more robust to unexpected or unknown moving objects in the scene.
However, the paper does not discuss the computational complexity of the per-pixel motion probability estimation. This could be a potential concern, especially for real-time applications that require efficient processing.
Additionally, the paper only evaluates DynaPix on RGB-D datasets, which provide depth information. It would be interesting to see how the system performs with monocular cameras, which are more common in many real-world applications.
Finally, the paper does not explore the potential for DynaPix to be integrated with other advanced SLAM techniques, such as learned feature representations or neural implicit mapping. Combining DynaPix with these emerging SLAM approaches could further improve its performance and robustness.
Conclusion
The DynaPix system represents a significant advance in dynamic Visual SLAM by introducing a novel, semantic-free approach to handling moving objects in the scene. By estimating per-pixel motion probabilities and integrating them into the SLAM algorithms, DynaPix can effectively track a camera's position and build a map, even in complex dynamic environments.
The researchers have demonstrated the effectiveness of DynaPix through thorough evaluations, and the open-sourcing of the code and datasets provides a valuable resource for the research community. As SLAM systems become increasingly important in a wide range of applications, innovations like DynaPix will be crucial for enabling reliable and robust performance in real-world, dynamic settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
DynaPix SLAM: A Pixel-Based Dynamic Visual SLAM Approach
Chenghao Xu, Elia Bonetto, Aamir Ahmad
Visual Simultaneous Localization and Mapping (V-SLAM) methods achieve remarkable performance in static environments, but face challenges in dynamic scenes where moving objects severely affect their core modules. To avoid this, dynamic V-SLAM approaches often leverage semantic information, geometric constraints, or optical flow. However, these methods are limited by imprecise estimations and their reliance on the accuracy of deep-learning models. Moreover, predefined thresholds for static/dynamic classification, the a-priori selection of dynamic object classes, and the inability to recognize unknown or unexpected moving objects, often degrade their performance. To address these limitations, we introduce DynaPix, a novel semantic-free V-SLAM system based on per-pixel motion probability estimation and an improved pose optimization process. The per-pixel motion probability is estimated using a static background differencing method on image data and optical flows computed on splatted frames. With DynaPix, we fully integrate these probabilities into map point selection and apply them through weighted bundle adjustment within the tracking and optimization modules of ORB-SLAM2. We thoroughly evaluate our method using the GRADE and TUM RGB-D datasets, showing significantly lower trajectory errors and longer tracking times in both static and dynamic sequences. The source code, datasets, and results are available at https://dynapix.is.tue.mpg.de/.
Read more8/21/2024
🖼️
0
Panoptic-SLAM: Visual SLAM in Dynamic Environments using Panoptic Segmentation
Gabriel Fischer Abati, Jo~ao Carlos Virgolino Soares, Vivian Suzano Medeiros, Marco Antonio Meggiolaro, Claudio Semini
The majority of visual SLAM systems are not robust in dynamic scenarios. The ones that deal with dynamic objects in the scenes usually rely on deep-learning-based methods to detect and filter these objects. However, these methods cannot deal with unknown moving objects. This work presents Panoptic-SLAM, an open-source visual SLAM system robust to dynamic environments, even in the presence of unknown objects. It uses panoptic segmentation to filter dynamic objects from the scene during the state estimation process. Panoptic-SLAM is based on ORB-SLAM3, a state-of-the-art SLAM system for static environments. The implementation was tested using real-world datasets and compared with several state-of-the-art systems from the literature, including DynaSLAM, DS-SLAM, SaD-SLAM, PVO and FusingPanoptic. For example, Panoptic-SLAM is on average four times more accurate than PVO, the most recent panoptic-based approach for visual SLAM. Also, experiments were performed using a quadruped robot with an RGB-D camera to test the applicability of our method in real-world scenarios. The tests were validated by a ground-truth created with a motion capture system.
Read more5/6/2024

0
Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
Huajian Huang, Longwei Li, Hui Cheng, Sai-Kit Yeung
The integration of neural rendering and the SLAM system recently showed promising results in joint localization and photorealistic view reconstruction. However, existing methods, fully relying on implicit representations, are so resource-hungry that they cannot run on portable devices, which deviates from the original intention of SLAM. In this paper, we present Photo-SLAM, a novel SLAM framework with a hyper primitives map. Specifically, we simultaneously exploit explicit geometric features for localization and learn implicit photometric features to represent the texture information of the observed environment. In addition to actively densifying hyper primitives based on geometric features, we further introduce a Gaussian-Pyramid-based training method to progressively learn multi-level features, enhancing photorealistic mapping performance. The extensive experiments with monocular, stereo, and RGB-D datasets prove that our proposed system Photo-SLAM significantly outperforms current state-of-the-art SLAM systems for online photorealistic mapping, e.g., PSNR is 30% higher and rendering speed is hundreds of times faster in the Replica dataset. Moreover, the Photo-SLAM can run at real-time speed using an embedded platform such as Jetson AGX Orin, showing the potential of robotics applications.
Read more4/9/2024
0
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
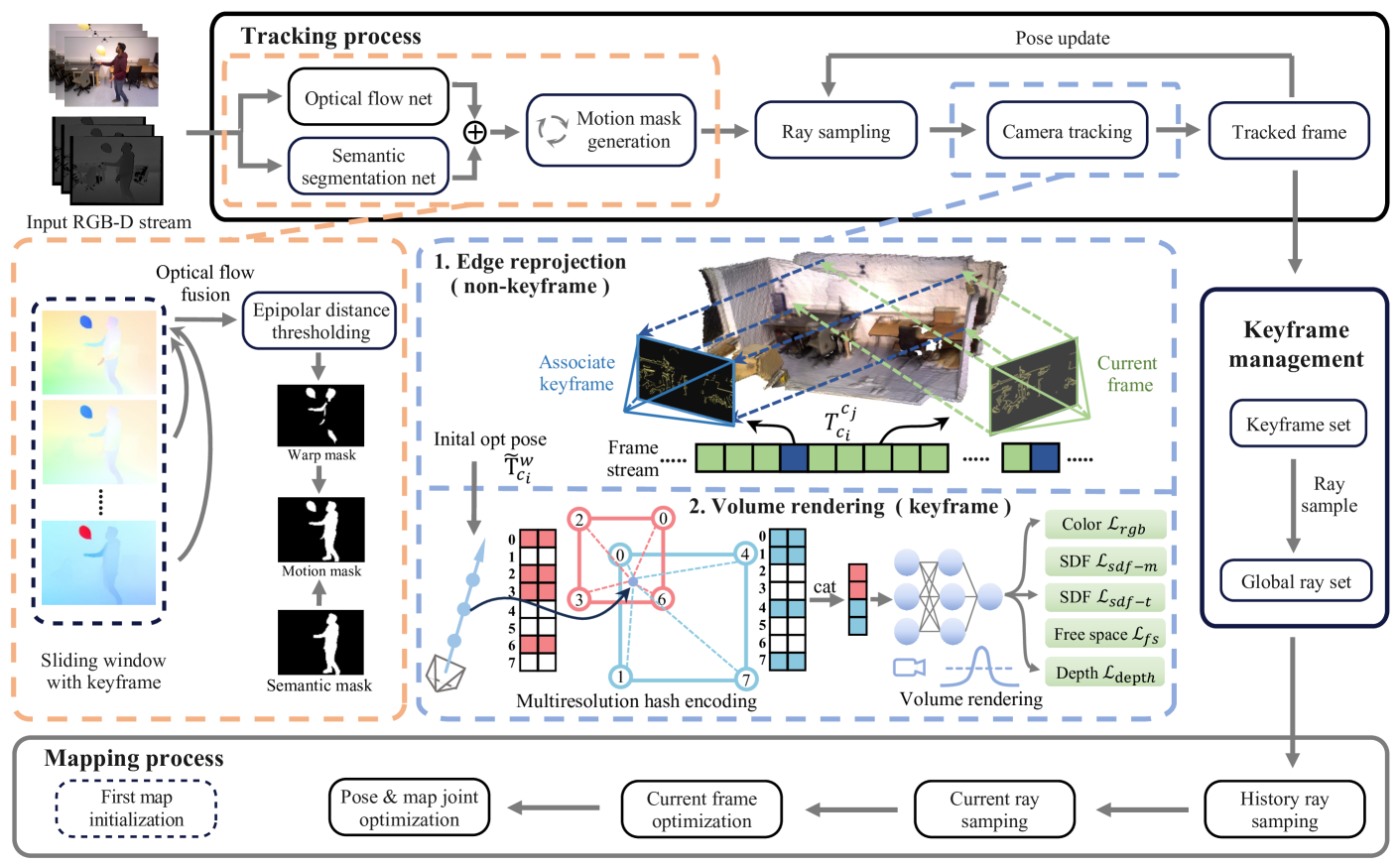
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Read more7/2/2024