Edge-Assisted ML-Aided Uncertainty-Aware Vehicle Collision Avoidance at Urban Intersections
2404.14523
0
0
➖
Abstract
Intersection crossing represents one of the most dangerous sections of the road infrastructure and Connected Vehicles (CVs) can serve as a revolutionary solution to the problem. In this work, we present a novel framework that detects preemptively collisions at urban crossroads, exploiting the Multi-access Edge Computing (MEC) platform of 5G networks. At the MEC, an Intersection Manager (IM) collects information from both vehicles and the road infrastructure to create a holistic view of the area of interest. Based on the historical data collected, the IM leverages the capabilities of an encoder-decoder recurrent neural network to predict, with high accuracy, the future vehicles' trajectories. As, however, accuracy is not a sufficient measure of how much we can trust a model, trajectory predictions are additionally associated with a measure of uncertainty towards confident collision forecasting and avoidance. Hence, contrary to any other approach in the state of the art, an uncertainty-aware collision prediction framework is developed that is shown to detect well in advance (and with high reliability) if two vehicles are on a collision course. Subsequently, collision detection triggers a number of alarms that signal the colliding vehicles to brake. Under real-world settings, thanks to the preemptive capabilities of the proposed approach, all the simulated imminent dangers are averted.
Create account to get full access
Overview
- Intersection crossings are among the most dangerous sections of road infrastructure
- Connected Vehicles (CVs) can be a revolutionary solution to this problem
- This work presents a novel framework that detects potential collisions at urban crossroads, using the Multi-access Edge Computing (MEC) platform of 5G networks
Plain English Explanation
Intersections, where roads cross, can be very dangerous places for drivers, pedestrians, and other road users. However, connected vehicles that can communicate with each other and with the road infrastructure could help solve this problem.
In this research, the authors developed a new system that can predict if vehicles are on a collision course at intersections, before an accident happens. The system uses the computing power available at the edge of 5G networks, in what's called a Multi-access Edge Computing (MEC) platform.
An "Intersection Manager" collects information from vehicles and the road infrastructure to get a complete picture of what's happening at the intersection. It then uses a type of artificial intelligence called a recurrent neural network to predict where the vehicles will go in the near future. Importantly, the system also provides a measure of how confident it is in these predictions.
By anticipating collisions before they occur, the system can trigger alerts to warn the drivers to brake and avoid the accident. In simulated tests, this preemptive approach was able to successfully prevent all the potential collisions.
Technical Explanation
The proposed framework uses the Multi-access Edge Computing (MEC) platform of 5G networks to create an "Intersection Manager" (IM) that can detect potential collisions at urban crossroads.
The IM collects real-time data from both the vehicles and the road infrastructure to build a comprehensive understanding of the intersection area. It then leverages an encoder-decoder recurrent neural network to predict the future trajectories of the vehicles with high accuracy, based on the historical data collected.
Crucially, the framework also provides a measure of uncertainty associated with these trajectory predictions. This allows the system to make confident collision forecasts and initiate appropriate avoidance actions.
When the system detects an imminent collision, it triggers a series of alarms to signal the colliding vehicles to brake. Through this preemptive approach, the simulations showed that all the potential accidents were successfully averted under real-world conditions.
Critical Analysis
The paper presents a promising approach to improving intersection safety using connected vehicle technology and edge computing. By incorporating uncertainty measures into the collision prediction model, the framework appears to address an important limitation of previous work in this area, which often relied solely on prediction accuracy.
However, the research was conducted in simulation, and it remains to be seen how well the system would perform in real-world, dynamic traffic scenarios. Additional testing and validation would be needed to assess the robustness and scalability of the proposed solution.
Furthermore, the paper does not discuss potential privacy or security concerns related to the centralized collection and processing of vehicle data by the Intersection Manager. These are important considerations that should be addressed, especially as connected vehicle technologies become more widespread.
Overall, this research represents a promising step towards enhancing intersection safety using advanced AI and communication technologies. Further development and careful consideration of the practical challenges and ethical implications will be crucial to realizing the full potential of this approach.
Conclusion
This work presents a novel framework that uses the edge computing capabilities of 5G networks to detect and prevent collisions at urban intersections. By collecting data from both vehicles and the road infrastructure, the system can accurately predict vehicle trajectories and, crucially, provide a measure of uncertainty in these predictions.
This uncertainty-aware approach allows the framework to initiate preemptive collision avoidance actions, successfully preventing all potential accidents in the simulated tests. While further real-world validation is needed, this research demonstrates the significant potential of connected vehicle technologies and edge computing to enhance road safety and save lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
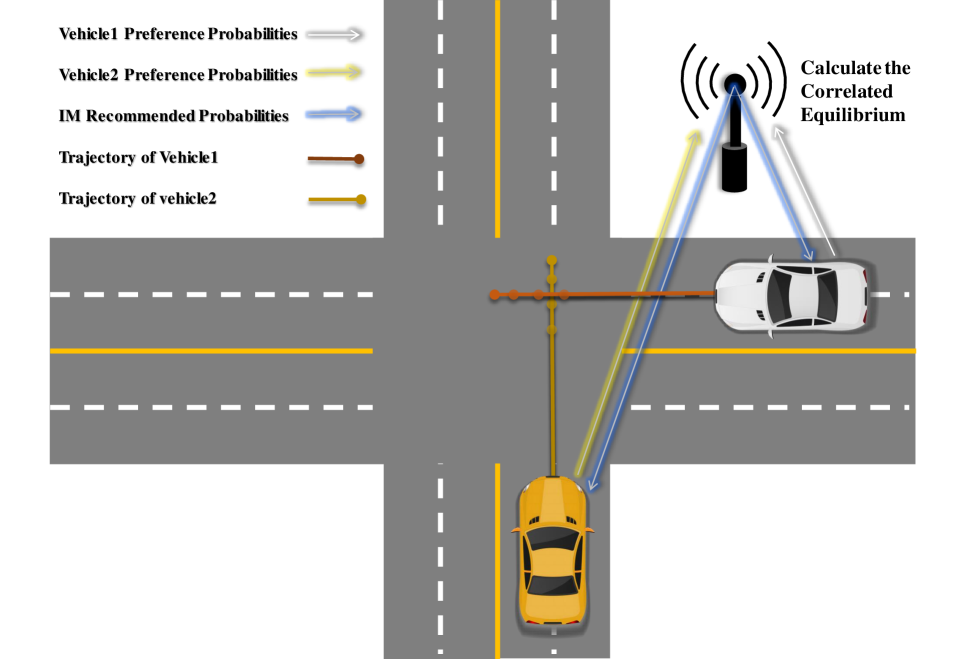
Multi-Vehicle Trajectory Planning at V2I-enabled Intersections based on Correlated Equilibrium
Wenyuan Wang, Peng Yi, Yiguang Hong
0
0
Generating trajectories that ensure both vehicle safety and improve traffic efficiency remains a challenging task at intersections. Many existing works utilize Nash equilibrium (NE) for the trajectory planning at intersections. However, NE-based planning can hardly guarantee that all vehicles are in the same equilibrium, leading to a risk of collision. In this work, we propose a framework for trajectory planning based on Correlated Equilibrium (CE) when V2I communication is also enabled. The recommendation with CE allows all vehicles to reach a safe and consensual equilibrium and meanwhile keeps the rationality as NE-based methods that no vehicle has the incentive to deviate. The Intersection Manager (IM) first collects the trajectory library and the personal preference probabilities over the library from each vehicle in a low-resolution spatial-temporal grid map. Then, the IM optimizes the recommendation probability distribution for each vehicle's trajectory by minimizing overall collision probability under the CE constraint. Finally, each vehicle samples a trajectory of the low-resolution map to construct a safety corridor and derive a smooth trajectory with a local refinement optimization. We conduct comparative experiments at a crossroad intersection involving two and four vehicles, validating the effectiveness of our method in balancing vehicle safety and traffic efficiency.
6/11/2024
🧠
Cognitive Internet of Vulnerable Road Users in Traffic: Predictive Neural Modulations of Road Crossing Intention
Xiaoshan Zhou, Carol C. Menassa, Vineet R. Kamat
0
0
Vulnerable Road Users (VRUs) present a significant challenge for road safety due to the frequent unpredictability of their behaviors. In typical Intelligent Transportation Systems, vision-based approaches supported by networked cameras are often used to anticipate VRUs motion intentions and trajectories. However, several limitations posed by occlusions and distractions set a boundary for the efficacy of such methods. To address these challenges, this study introduces a framework that leverages data collected using wearable neurophysiological sensors on VRUs to integrate them seamlessly into the Vehicle-to-Everything communication framework. This integration empowers VRUs to autonomously broadcast their intended movements to other road agents, especially autonomous vehicles, thereby bridging a critical gap in current vehicular communication systems. To validate this concept, we conducted an experiment involving 12 participants, from whom EEG signals were collected as they engaged in road-crossing decisions within simulated environments. Employing Hidden Markov Models, we identified four cognitive stages intrinsic to a pedestrian's decision-making process. Our statistical analysis further revealed significant variations in EEG activities across these stages, shedding light on the neural correlates and cognitive dynamics underpinning pedestrian road-crossing behavior. We then developed a predictive cognitive model using dynamic time warping and K-nearest neighbors algorithms, optimized through a data-driven sliding window approach. This model demonstrated high predictive accuracy, evidenced by an Area Under the Curve of 0.91, indicating its capability to anticipate pedestrian road-crossing actions approximately 1 second in advance of any pedestrian movement. This research paves the way for a novel VRU-Vehicle interaction paradigm and signifies a shift towards a forward-thinking ecosystem.
5/24/2024

New!Integrating occlusion awareness in urban motion prediction for enhanced autonomous vehicle navigation
Vinicius Trentin, Juan Medina-Lee, Antonio Artu~nedo, Jorge Villagra
0
0
Motion prediction is a key factor towards the full deployment of autonomous vehicles. It is fundamental in order to ensure safety while navigating through highly interactive and complex scenarios. Lack of visibility due to an obstructed view or sensor range poses a great safety issue for autonomous vehicles. The inclusion of occlusion in interaction-aware approaches is not very well explored in the literature. In this work, the MultIAMP framework, which produces multimodal probabilistic outputs from the integration of a Dynamic Bayesian Network and Markov chains, is extended to tackle occlusions. The framework is evaluated with a state-of-the-art motion planner in two realistic use cases.
7/1/2024

Unified End-to-End V2X Cooperative Autonomous Driving
Zhiwei Li, Bozhen Zhang, Lei Yang, Tianyu Shen, Nuo Xu, Ruosen Hao, Weiting Li, Tao Yan, Huaping Liu
0
0
V2X cooperation, through the integration of sensor data from both vehicles and infrastructure, is considered a pivotal approach to advancing autonomous driving technology. Current research primarily focuses on enhancing perception accuracy, often overlooking the systematic improvement of accident prediction accuracy through end-to-end learning, leading to insufficient attention to the safety issues of autonomous driving. To address this challenge, this paper introduces the UniE2EV2X framework, a V2X-integrated end-to-end autonomous driving system that consolidates key driving modules within a unified network. The framework employs a deformable attention-based data fusion strategy, effectively facilitating cooperation between vehicles and infrastructure. The main advantages include: 1) significantly enhancing agents' perception and motion prediction capabilities, thereby improving the accuracy of accident predictions; 2) ensuring high reliability in the data fusion process; 3) superior end-to-end perception compared to modular approaches. Furthermore, We implement the UniE2EV2X framework on the challenging DeepAccident, a simulation dataset designed for V2X cooperative driving.
5/8/2024