Integrating occlusion awareness in urban motion prediction for enhanced autonomous vehicle navigation
2406.19798
0
0

Abstract
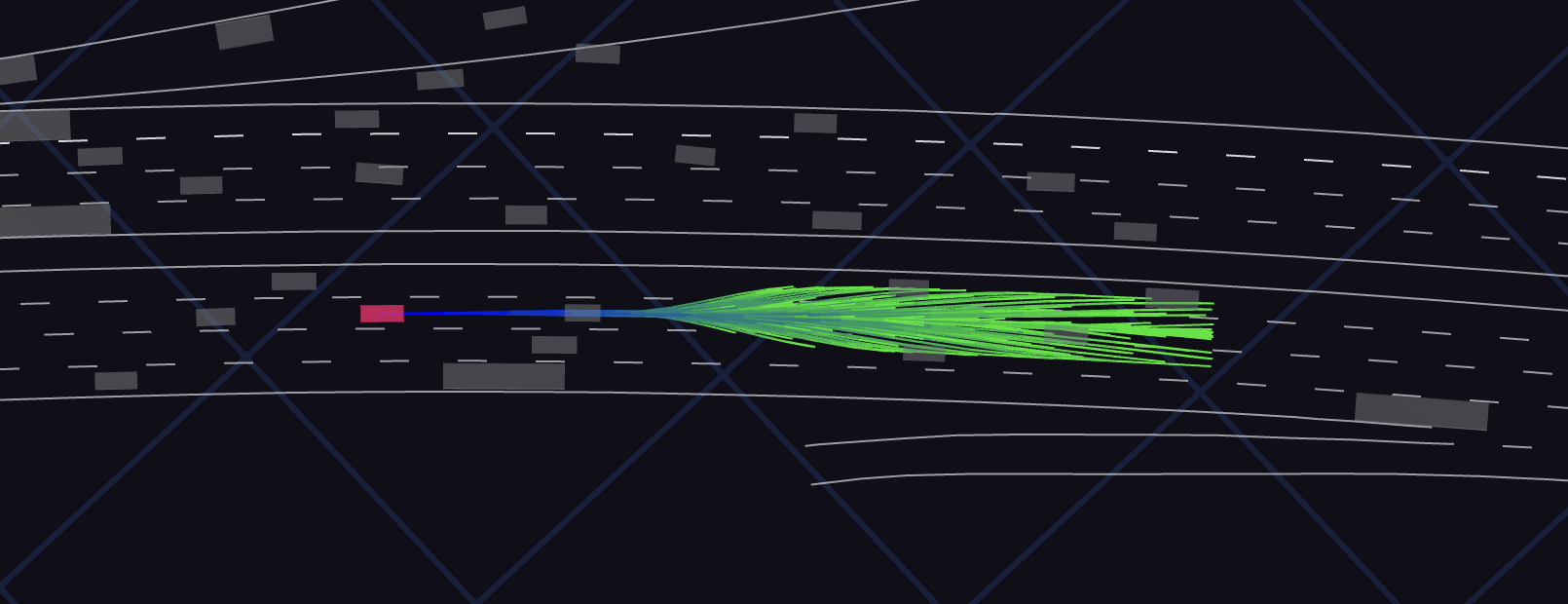
Motion prediction is a key factor towards the full deployment of autonomous vehicles. It is fundamental in order to ensure safety while navigating through highly interactive and complex scenarios. Lack of visibility due to an obstructed view or sensor range poses a great safety issue for autonomous vehicles. The inclusion of occlusion in interaction-aware approaches is not very well explored in the literature. In this work, the MultIAMP framework, which produces multimodal probabilistic outputs from the integration of a Dynamic Bayesian Network and Markov chains, is extended to tackle occlusions. The framework is evaluated with a state-of-the-art motion planner in two realistic use cases.
Create account to get full access
Overview
- This paper presents a novel approach to integrating occlusion awareness into urban motion prediction for enhanced autonomous vehicle navigation.
- The research is partially funded by MCIN/AEI/10.13039/501100011033 and by ERDF A way of making Europe with the project DISCERN (PID2021- 125850OB-I00).
Plain English Explanation
Self-driving cars rely on accurately predicting the future movements of other vehicles, pedestrians, and objects around them to navigate safely. However, occlusions - objects that block the view of the self-driving car's sensors - can make this prediction task challenging.
This paper introduces a new method that helps self-driving cars better account for occlusions when forecasting the future motions of other road users. By understanding where occlusions may occur and how they impact the visibility of other objects, the self-driving car can make more informed and reliable predictions about what other road users are likely to do next.
This improved occlusion awareness can enhance the overall navigation and decision-making capabilities of autonomous vehicles, leading to safer and more efficient self-driving technology. The research builds on previous work in areas like estimating visibility from alternate perspectives, interpretable neural motion planning, and knowledge-integrated motion forecasting.
Technical Explanation
The key innovation of this paper is a novel approach to integrating occlusion awareness into urban motion prediction models for autonomous vehicles. The researchers developed a deep learning architecture that takes into account both the current state of the environment (e.g. positions and velocities of other vehicles) as well as predicted occlusions to generate more accurate forecasts of future motions.
The model first uses a real-time motion planning system to estimate the visibility of other road users from the perspective of the autonomous vehicle. It then incorporates this occlusion information into a spatiotemporal occupancy grid prediction model to produce more reliable forecasts of where other objects are likely to be in the future.
The researchers evaluated their approach on real-world urban driving datasets and found that it outperformed baseline motion prediction models that did not account for occlusions. The occlusion-aware model was able to better anticipate the future movements of occluded objects, leading to safer and more efficient navigation decisions for the autonomous vehicle.
Critical Analysis
The paper presents a compelling approach to enhancing autonomous vehicle navigation through improved motion prediction that considers occlusions. The experimental results demonstrate the benefits of this technique, suggesting it could be a valuable contribution to the field of self-driving car technology.
However, the paper does not address some potential limitations and avenues for future research. For example, the accuracy of the occlusion estimation component relies on the quality and coverage of the sensor data available to the autonomous vehicle. In challenging urban environments with many occluding objects, there may still be blind spots that the system struggles to account for.
Additionally, the paper focuses on motion prediction for other vehicles, but does not explore how this approach could be extended to pedestrians, cyclists, and other road users with more complex and less predictable behaviors. Integrating a wider range of road user types into the occlusion-aware motion prediction model could further improve the safety and robustness of autonomous navigation.
Overall, this research represents an important step forward in making self-driving cars more aware of their surroundings and better able to anticipate the future actions of other road users, even when they are temporarily occluded from view. By continuing to build on this work, researchers can help make autonomous vehicles safer and more capable in complex urban environments.
Conclusion
This paper presents a novel approach to integrating occlusion awareness into urban motion prediction models for autonomous vehicles. By better understanding where occlusions may occur and how they impact the visibility of other road users, the proposed deep learning architecture can generate more accurate forecasts of future motions.
The experimental results demonstrate the benefits of this occlusion-aware motion prediction technique, which could lead to enhanced navigation capabilities and safer decision-making for self-driving cars. While the paper highlights some potential limitations, the research represents an important advancement in the field of autonomous vehicle technology that could have significant real-world implications.
As the development of self-driving cars continues, integrating occlusion awareness into motion prediction models will be crucial for navigating complex urban environments and ensuring the safety of all road users. This work lays the foundation for further research and innovation in this critical area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Estimating Visibility from Alternate Perspectives for Motion Planning with Occlusions
Barry Gilhuly (University of Waterloo), Armin Sadeghi (University of Waterloo), Stephen L. Smith (University of Waterloo)
0
0
Visibility is a crucial aspect of planning and control of autonomous vehicles (AV), particularly when navigating environments with occlusions. However, when an AV follows a trajectory with multiple occlusions, existing methods evaluate each occlusion individually, calculate a visibility cost for each, and rely on the planner to minimize the overall cost. This can result in conflicting priorities for the planner, as individual occlusion costs may appear to be in opposition. We solve this problem by creating an alternate perspective cost map that allows for an aggregate view of the occlusions in the environment. The value of each cell on the cost map is a measure of the amount of visual information that the vehicle can gain about the environment by visiting that location. Our proposed method identifies observation locations and occlusion targets drawn from both map data and sensor data. We show how to estimate an alternate perspective for each observation location and then combine all estimates into a single alternate perspective cost map for motion planning.
4/12/2024
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Sourav Biswas, Sergio Casas, Quinlan Sykora, Ben Agro, Abbas Sadat, Raquel Urtasun
0
0
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
4/3/2024
🤿
KI-PMF: Knowledge Integrated Plausible Motion Forecasting
Abhishek Vivekanandan, Ahmed Abouelazm, Philip Schorner, J. Marius Zollner
0
0
Accurately forecasting the motion of traffic actors is crucial for the deployment of autonomous vehicles at a large scale. Current trajectory forecasting approaches primarily concentrate on optimizing a loss function with a specific metric, which can result in predictions that do not adhere to physical laws or violate external constraints. Our objective is to incorporate explicit knowledge priors that allow a network to forecast future trajectories in compliance with both the kinematic constraints of a vehicle and the geometry of the driving environment. To achieve this, we introduce a non-parametric pruning layer and attention layers to integrate the defined knowledge priors. Our proposed method is designed to ensure reachability guarantees for traffic actors in both complex and dynamic situations. By conditioning the network to follow physical laws, we can obtain accurate and safe predictions, essential for maintaining autonomous vehicles' safety and efficiency in real-world settings.In summary, this paper presents concepts that prevent off-road predictions for safe and reliable motion forecasting by incorporating knowledge priors into the training process.
5/21/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024