Multi-Vehicle Trajectory Planning at V2I-enabled Intersections based on Correlated Equilibrium

0
Sign in to get full access
Overview
- This paper proposes a method for multi-vehicle trajectory planning at intersections enabled with vehicle-to-infrastructure (V2I) communication.
- The approach is based on the concept of correlated equilibrium, which is a game-theoretic solution to coordination problems.
- The goal is to enable autonomous vehicles to navigate through intersections safely and efficiently by coordinating their movements.
Plain English Explanation
The paper focuses on a problem faced by autonomous vehicles at intersections. When multiple self-driving cars approach an intersection, they need to coordinate their movements to avoid collisions and get through the intersection as efficiently as possible. The authors present a solution based on the concept of correlated equilibrium.
Imagine a group of people trying to get through a doorway at the same time. If they all just push forward, there will be chaos and someone might get hurt. But if they take turns and coordinate their movements, they can all get through safely and quickly. The correlated equilibrium approach works in a similar way for autonomous vehicles at an intersection.
The key idea is that the vehicles communicate with the intersection's infrastructure (V2I) to share information about their intended trajectories. This allows the system to plan the vehicles' movements in a coordinated way, so that they can safely and efficiently navigate the intersection without colliding. By using this game-theoretic approach, the authors aim to enable autonomous vehicles to handle complex intersection scenarios more reliably than traditional methods.
Technical Explanation
The paper presents a multi-vehicle trajectory planning algorithm for V2I-enabled intersections. The approach is based on the concept of correlated equilibrium, a game-theoretic solution to coordination problems.
The algorithm works as follows:
- Vehicles communicate their intended trajectories to the intersection's V2I infrastructure.
- The infrastructure uses this information to formulate a correlated equilibrium problem, which aims to find a mutually beneficial set of trajectories for all vehicles.
- The correlated equilibrium problem is solved using an optimization approach, resulting in a coordinated plan for the vehicles' movements.
- The planned trajectories are then communicated back to the vehicles, which execute them to navigate the intersection.
This approach allows the vehicles to coordinate their actions in a decentralized manner, without the need for a centralized controller. The authors demonstrate the effectiveness of their method through simulations, showing that it can improve intersection throughput and safety compared to uncoordinated baseline methods.
Critical Analysis
The paper presents a novel and promising approach to autonomous vehicle navigation at intersections. The use of correlated equilibrium to coordinate the vehicles' movements is a clever application of game theory to a practical problem.
However, the paper does not address some potential limitations of the approach. For example, the reliance on V2I communication may be problematic in areas with poor infrastructure or connectivity. Additionally, the optimization-based solution may struggle to scale to large-scale intersections with many vehicles.
Further research is needed to explore the robustness of the correlated equilibrium approach in the face of sensor errors, communication failures, or unexpected vehicle behavior. Parallel optimization techniques may also be worth investigating to improve the scalability of the algorithm.
Conclusion
This paper presents a novel method for multi-vehicle trajectory planning at V2I-enabled intersections, based on the concept of correlated equilibrium. By coordinating the vehicles' movements through communication with the intersection infrastructure, the approach aims to improve the safety and efficiency of autonomous vehicle navigation at complex intersections.
While the paper demonstrates the potential of this technique, further research is needed to address potential limitations and enhance the robustness and scalability of the approach. Nevertheless, the ideas presented in this work represent an important step towards the development of more advanced and reliable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Vehicle Trajectory Planning at V2I-enabled Intersections based on Correlated Equilibrium
Wenyuan Wang, Peng Yi, Yiguang Hong
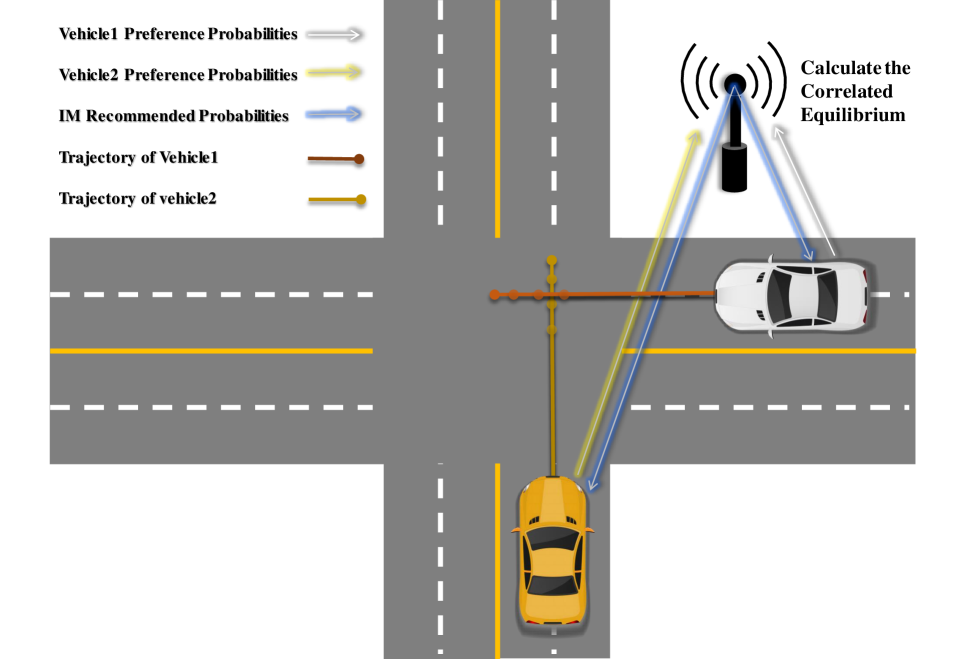
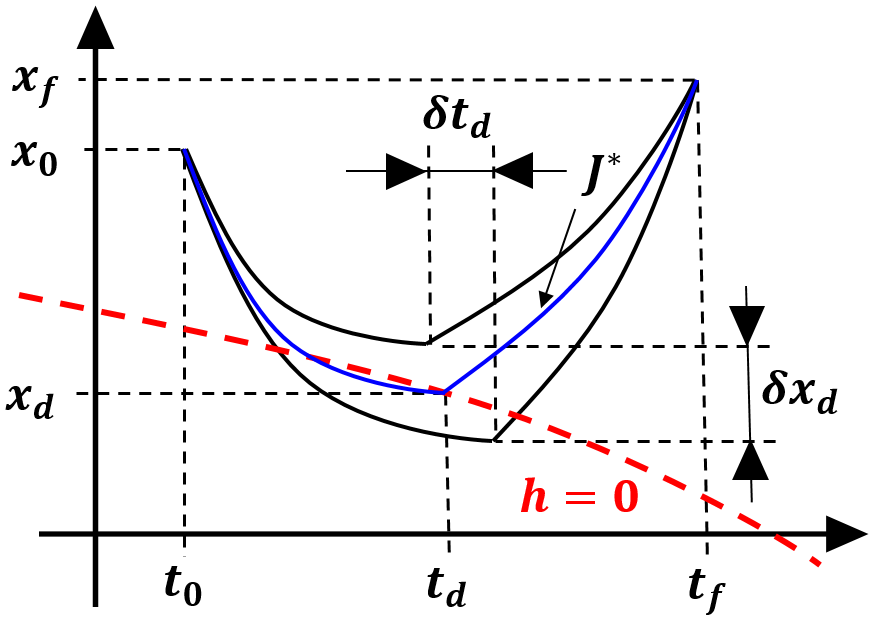
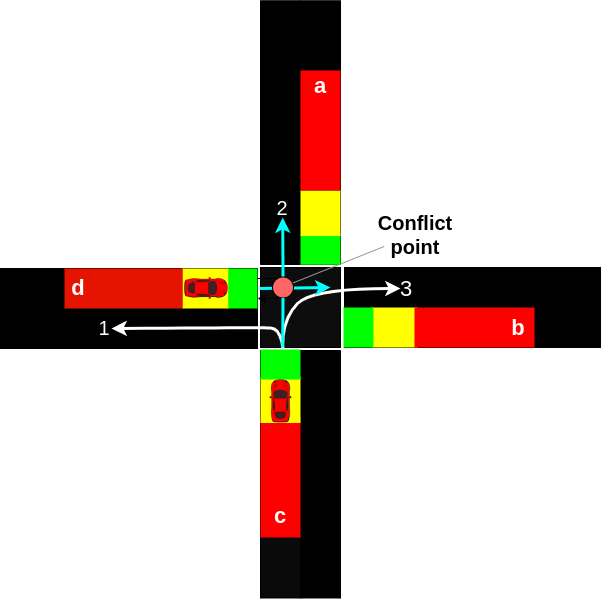
Generating trajectories that ensure both vehicle safety and improve traffic efficiency remains a challenging task at intersections. Many existing works utilize Nash equilibrium (NE) for the trajectory planning at intersections. However, NE-based planning can hardly guarantee that all vehicles are in the same equilibrium, leading to a risk of collision. In this work, we propose a framework for trajectory planning based on Correlated Equilibrium (CE) when V2I communication is also enabled. The recommendation with CE allows all vehicles to reach a safe and consensual equilibrium and meanwhile keeps the rationality as NE-based methods that no vehicle has the incentive to deviate. The Intersection Manager (IM) first collects the trajectory library and the personal preference probabilities over the library from each vehicle in a low-resolution spatial-temporal grid map. Then, the IM optimizes the recommendation probability distribution for each vehicle's trajectory by minimizing overall collision probability under the CE constraint. Finally, each vehicle samples a trajectory of the low-resolution map to construct a safety corridor and derive a smooth trajectory with a local refinement optimization. We conduct comparative experiments at a crossroad intersection involving two and four vehicles, validating the effectiveness of our method in balancing vehicle safety and traffic efficiency.
Read more6/11/2024
0
Interaction-Aware Vehicle Motion Planning with Collision Avoidance Constraints in Highway Traffic
Dongryul Kim, Hyeonjeong Kim, Kyoungseok Han
This paper proposes collision-free optimal trajectory planning for autonomous vehicles in highway traffic, where vehicles need to deal with the interaction among each other. To address this issue, a novel optimal control framework is suggested, which couples the trajectory of surrounding vehicles with collision avoidance constraints. Additionally, we describe a trajectory optimization technique under state constraints, utilizing a planner based on Pontryagin's Minimum Principle, capable of numerically solving collision avoidance scenarios with surrounding vehicles. Simulation results demonstrate the effectiveness of the proposed approach regarding interaction-based motion planning for different scenarios.
Read more4/3/2024
➖
0
Edge-Assisted ML-Aided Uncertainty-Aware Vehicle Collision Avoidance at Urban Intersections
Dinesh Cyril Selvaraj, Christian Vitale, Tania Panayiotou, Panayiotis Kolios, Carla Fabiana Chiasserini, Georgios Ellinas
Intersection crossing represents one of the most dangerous sections of the road infrastructure and Connected Vehicles (CVs) can serve as a revolutionary solution to the problem. In this work, we present a novel framework that detects preemptively collisions at urban crossroads, exploiting the Multi-access Edge Computing (MEC) platform of 5G networks. At the MEC, an Intersection Manager (IM) collects information from both vehicles and the road infrastructure to create a holistic view of the area of interest. Based on the historical data collected, the IM leverages the capabilities of an encoder-decoder recurrent neural network to predict, with high accuracy, the future vehicles' trajectories. As, however, accuracy is not a sufficient measure of how much we can trust a model, trajectory predictions are additionally associated with a measure of uncertainty towards confident collision forecasting and avoidance. Hence, contrary to any other approach in the state of the art, an uncertainty-aware collision prediction framework is developed that is shown to detect well in advance (and with high reliability) if two vehicles are on a collision course. Subsequently, collision detection triggers a number of alarms that signal the colliding vehicles to brake. Under real-world settings, thanks to the preemptive capabilities of the proposed approach, all the simulated imminent dangers are averted.
Read more4/24/2024
0
A low-cost Framework for Decentralized Autonomous Intersection Management
Rugved Katole, Arpita Sinha
This paper addresses the traffic management problem for autonomous vehicles at intersections without traffic signals. In the current system, a road junction has no traffic signals when the traffic volume is low to medium. Installing infrastructure at each unsignalled crossing to coordinate autonomous cars can be formidable. We propose a novel low-cost solution strategy where the vehicles use a harmony matrix to find the best possible combination of the cars to cross the intersection without any crashes. The harmony matrix defines the connection between different vehicle maneuvers and is queried online for intersection management. We maximize the throughput of the intersection by solving a maximal clique problem formulated based on the vehicles present at the intersection. The proposed algorithm relies on the intent perceived by the autonomous vehicles. We compare our work with a communication-based strategy that uses V2I communication protocols, and through extensive simulation, we showed that our algorithm is comparable when the traffic volume is less than 500 PCUs/hr/lane.
Read more4/1/2024