EgoGen: An Egocentric Synthetic Data Generator
2401.08739
0
1
Abstract
Understanding the world in first-person view is fundamental in Augmented Reality (AR). This immersive perspective brings dramatic visual changes and unique challenges compared to third-person views. Synthetic data has empowered third-person-view vision models, but its application to embodied egocentric perception tasks remains largely unexplored. A critical challenge lies in simulating natural human movements and behaviors that effectively steer the embodied cameras to capture a faithful egocentric representation of the 3D world. To address this challenge, we introduce EgoGen, a new synthetic data generator that can produce accurate and rich ground-truth training data for egocentric perception tasks. At the heart of EgoGen is a novel human motion synthesis model that directly leverages egocentric visual inputs of a virtual human to sense the 3D environment. Combined with collision-avoiding motion primitives and a two-stage reinforcement learning approach, our motion synthesis model offers a closed-loop solution where the embodied perception and movement of the virtual human are seamlessly coupled. Compared to previous works, our model eliminates the need for a pre-defined global path, and is directly applicable to dynamic environments. Combined with our easy-to-use and scalable data generation pipeline, we demonstrate EgoGen's efficacy in three tasks: mapping and localization for head-mounted cameras, egocentric camera tracking, and human mesh recovery from egocentric views. EgoGen will be fully open-sourced, offering a practical solution for creating realistic egocentric training data and aiming to serve as a useful tool for egocentric computer vision research. Refer to our project page: https://ego-gen.github.io/.
Create account to get full access
Overview
• The paper "EgoGen: An Egocentric Synthetic Data Generator" introduces a system for generating realistic, egocentric (first-person) motion data that can be used to train computer vision and robotics models.
• The key idea is to leverage sensor data from wearable devices like cameras and inertial measurement units (IMUs) to drive the synthesis of plausible human motion, creating a large-scale dataset of egocentric videos and corresponding 3D poses.
• This synthetic data can help address the challenges of collecting and annotating real-world egocentric datasets, which can be time-consuming and expensive.
Plain English Explanation
The paper presents a system called EgoGen that can generate realistic, first-person motion data. This is useful for training computer vision and robotics models that need to understand how people move and interact with the world from a first-person perspective.
Typically, collecting and annotating large-scale datasets of real-world, egocentric video can be very challenging. EgoGen addresses this by using sensor data from wearable devices like cameras and motion sensors to drive the synthesis of plausible human movements. This allows the system to create a large, diverse dataset of egocentric videos and corresponding 3D pose information without the need for manual data collection and labeling.
The key insight is that the sensor data from these wearable devices, such as the camera view and inertial measurements, can provide valuable cues for generating realistic human motion. EgoGen leverages these cues to produce synthetic videos that mimic the appearance and dynamics of real-world, first-person experiences.
This synthetic data can then be used to train computer vision and robotics models, helping them better understand the complexities of egocentric perception and interaction. By providing a scalable way to generate high-quality egocentric data, EgoGen has the potential to advance research in areas like autonomous driving, object detection, and scene understanding from a first-person perspective.
Technical Explanation
The key components of the EgoGen system are:
-
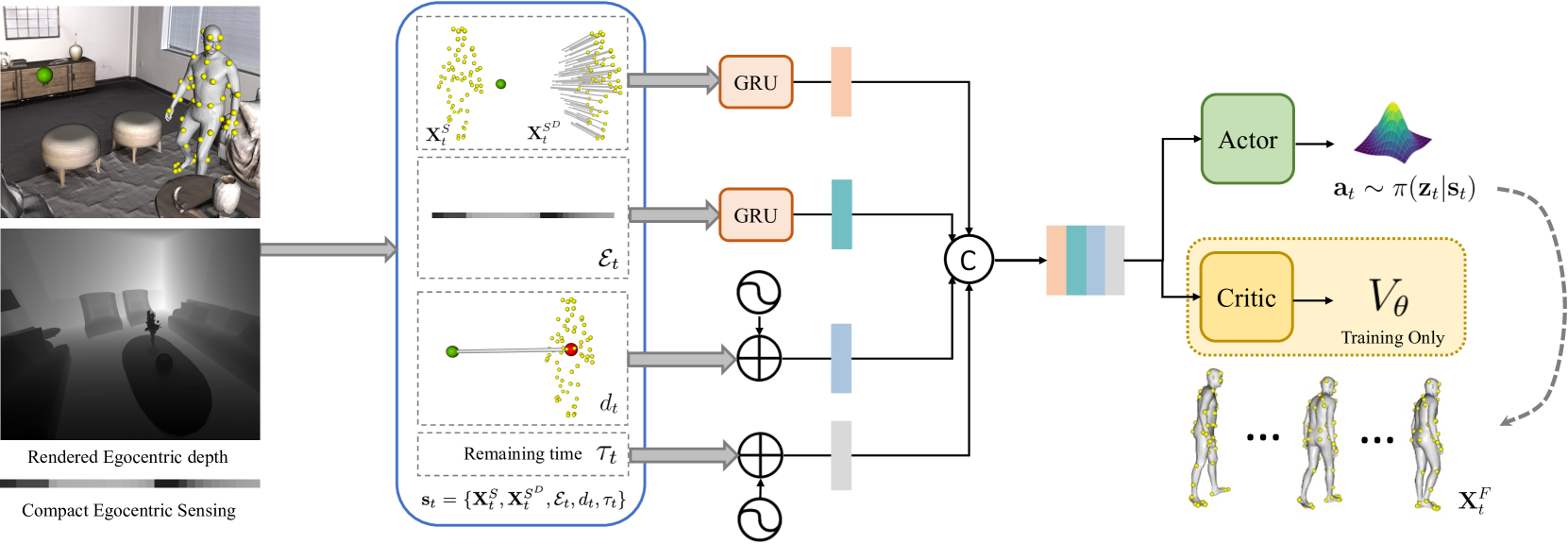
Ego-Sensing Driven Motion Synthesis: EgoGen uses sensor data from wearable devices, such as camera views and inertial measurements, to drive the synthesis of realistic human motion. This is achieved by learning a mapping between the sensor data and 3D pose parameters, which are then used to generate plausible motion sequences.
-
Egocentric Video Synthesis: The generated 3D pose sequences are combined with a realistic egocentric camera model to produce synthetic egocentric videos that mimic the appearance and dynamics of real-world first-person footage.
-
Diverse Data Generation: EgoGen incorporates techniques to generate a diverse set of motion sequences and camera views, resulting in a large-scale dataset of synthetic egocentric videos and corresponding 3D pose annotations.
The authors evaluate the quality and realism of the generated data through both quantitative and qualitative assessments. They demonstrate that the synthetic data produced by EgoGen can be effectively used to train computer vision and robotics models, outperforming models trained on real-world datasets in certain tasks.
Critical Analysis
The EgoGen system addresses an important challenge in the field of computer vision and robotics: the scarcity of large-scale, high-quality egocentric datasets. By leveraging sensor data from wearable devices, the authors have developed a scalable approach to generate synthetic data that can be used to train models for tasks like autonomous navigation and scene understanding from a first-person perspective.
However, the paper does not provide a comprehensive evaluation of the limitations and potential issues with the generated data. While the authors demonstrate the effectiveness of the synthetic data for training computer vision models, it would be valuable to understand the specific scenarios or tasks where the generated data may not be a suitable substitute for real-world data.
Additionally, the paper could have explored the potential biases or artifacts introduced by the EgoGen system, and how these may impact the performance and generalization of the trained models. Addressing these aspects would help researchers and practitioners better understand the strengths and weaknesses of the proposed approach.
Conclusion
The "EgoGen: An Egocentric Synthetic Data Generator" paper introduces a novel system for generating realistic, first-person motion data that can be used to train computer vision and robotics models. By leveraging sensor data from wearable devices, the authors have developed a scalable approach to overcome the challenges of collecting and annotating real-world egocentric datasets.
The generated synthetic data has shown promise in improving the performance of models trained on tasks like object detection and scene understanding from a first-person perspective. This work has the potential to significantly advance research in areas such as autonomous driving, augmented reality, and human-robot interaction, where understanding egocentric perception and interaction is crucial.
While the paper demonstrates the effectiveness of the EgoGen system, further exploration of its limitations and potential biases would help strengthen the overall contribution and provide a more comprehensive understanding of the strengths and weaknesses of the proposed approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
3D Human Pose Perception from Egocentric Stereo Videos
Hiroyasu Akada, Jian Wang, Vladislav Golyanik, Christian Theobalt
0
0
While head-mounted devices are becoming more compact, they provide egocentric views with significant self-occlusions of the device user. Hence, existing methods often fail to accurately estimate complex 3D poses from egocentric views. In this work, we propose a new transformer-based framework to improve egocentric stereo 3D human pose estimation, which leverages the scene information and temporal context of egocentric stereo videos. Specifically, we utilize 1) depth features from our 3D scene reconstruction module with uniformly sampled windows of egocentric stereo frames, and 2) human joint queries enhanced by temporal features of the video inputs. Our method is able to accurately estimate human poses even in challenging scenarios, such as crouching and sitting. Furthermore, we introduce two new benchmark datasets, i.e., UnrealEgo2 and UnrealEgo-RW (RealWorld). The proposed datasets offer a much larger number of egocentric stereo views with a wider variety of human motions than the existing datasets, allowing comprehensive evaluation of existing and upcoming methods. Our extensive experiments show that the proposed approach significantly outperforms previous methods. We will release UnrealEgo2, UnrealEgo-RW, and trained models on our project page.
5/16/2024
3D Human Reconstruction in the Wild with Synthetic Data Using Generative Models
Yongtao Ge, Wenjia Wang, Yongfan Chen, Hao Chen, Chunhua Shen
0
0
In this work, we show that synthetic data created by generative models is complementary to computer graphics (CG) rendered data for achieving remarkable generalization performance on diverse real-world scenes for 3D human pose and shape estimation (HPS). Specifically, we propose an effective approach based on recent diffusion models, termed HumanWild, which can effortlessly generate human images and corresponding 3D mesh annotations. We first collect a large-scale human-centric dataset with comprehensive annotations, e.g., text captions and surface normal images. Then, we train a customized ControlNet model upon this dataset to generate diverse human images and initial ground-truth labels. At the core of this step is that we can easily obtain numerous surface normal images from a 3D human parametric model, e.g., SMPL-X, by rendering the 3D mesh onto the image plane. As there exists inevitable noise in the initial labels, we then apply an off-the-shelf foundation segmentation model, i.e., SAM, to filter negative data samples. Our data generation pipeline is flexible and customizable to facilitate different real-world tasks, e.g., ego-centric scenes and perspective-distortion scenes. The generated dataset comprises 0.79M images with corresponding 3D annotations, covering versatile viewpoints, scenes, and human identities. We train various HPS regressors on top of the generated data and evaluate them on a wide range of benchmarks (3DPW, RICH, EgoBody, AGORA, SSP-3D) to verify the effectiveness of the generated data. By exclusively employing generative models, we generate large-scale in-the-wild human images and high-quality annotations, eliminating the need for real-world data collection.
4/12/2024
On the Application of Egocentric Computer Vision to Industrial Scenarios
Vivek Chavan, Oliver Heimann, Jorg Kruger
0
0
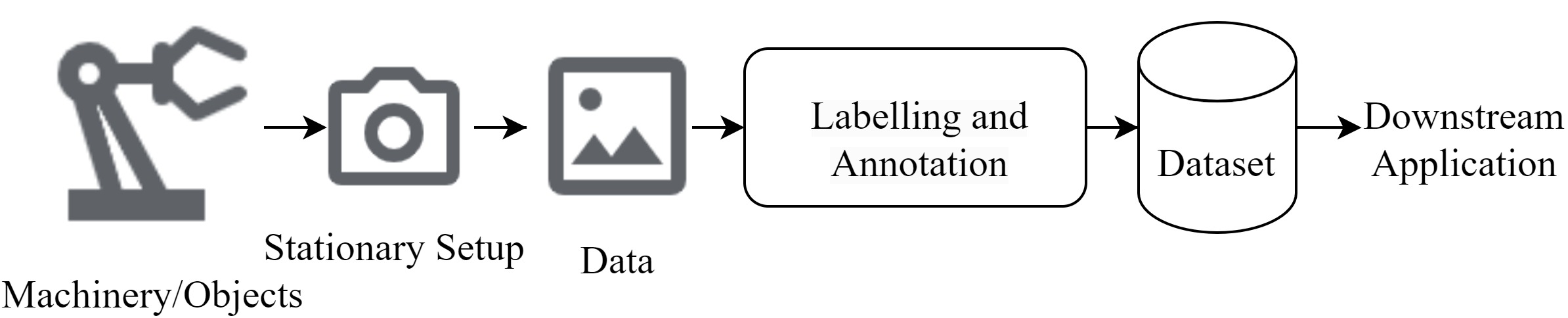
Egocentric vision aims to capture and analyse the world from the first-person perspective. We explore the possibilities for egocentric wearable devices to improve and enhance industrial use cases w.r.t. data collection, annotation, labelling and downstream applications. This would contribute to easier data collection and allow users to provide additional context. We envision that this approach could serve as a supplement to the traditional industrial Machine Vision workflow. Code, Dataset and related resources will be available at: https://github.com/Vivek9Chavan/EgoVis24
6/13/2024

EgoPet: Egomotion and Interaction Data from an Animal's Perspective
Amir Bar, Arya Bakhtiar, Danny Tran, Antonio Loquercio, Jathushan Rajasegaran, Yann LeCun, Amir Globerson, Trevor Darrell
0
0
Animals perceive the world to plan their actions and interact with other agents to accomplish complex tasks, demonstrating capabilities that are still unmatched by AI systems. To advance our understanding and reduce the gap between the capabilities of animals and AI systems, we introduce a dataset of pet egomotion imagery with diverse examples of simultaneous egomotion and multi-agent interaction. Current video datasets separately contain egomotion and interaction examples, but rarely both at the same time. In addition, EgoPet offers a radically distinct perspective from existing egocentric datasets of humans or vehicles. We define two in-domain benchmark tasks that capture animal behavior, and a third benchmark to assess the utility of EgoPet as a pretraining resource to robotic quadruped locomotion, showing that models trained from EgoPet outperform those trained from prior datasets.
4/16/2024