EgoNav: Egocentric Scene-aware Human Trajectory Prediction

0
Sign in to get full access
Overview
- This paper presents a method for predicting human trajectories in egocentric scenes, taking into account the surrounding environment.
- The approach uses a diffusion model to generate future trajectory predictions conditioned on the current scene and human pose.
- Key contributions include a novel scene-aware trajectory prediction model and comprehensive evaluations on multiple datasets.
Plain English Explanation
The paper describes a way to predict where a person might move next, based on what's happening around them. Instead of just looking at the person's current position and movement, the model also considers the details of the scene - the layout of the room, the locations of objects, and so on.
By understanding the context of the situation, the model can make more accurate predictions about the person's future path. It uses a technique called a "diffusion model" to generate multiple possible trajectories, rather than just a single prediction. This allows the model to capture the uncertainty and variability in human movement.
The key innovation is incorporating the surrounding scene information into the trajectory prediction. This helps the model understand things like whether the person is navigating around obstacles, following a specific path, or responding to events happening in the environment. Overall, this scene-aware approach leads to more realistic and reliable predictions of where a person is likely to move next.
Technical Explanation
The paper introduces a novel egocentric scene-aware human trajectory prediction model that leverages a diffusion model to generate future trajectory predictions conditioned on the current scene and human pose.
The key components of the approach include:
- A scene encoder that extracts relevant features from the egocentric camera view
- A pose encoder that encodes the current human body pose
- A diffusion model that takes the encoded scene and pose as input and predicts a distribution over future trajectories
By modeling the trajectory prediction in this scene-aware, probabilistic manner, the approach is able to capture the uncertainty and multimodality inherent in human motion. The authors evaluate the model on several benchmark datasets and demonstrate improved performance over previous methods.
Critical Analysis
The paper presents a compelling approach to incorporating rich scene context into the task of human trajectory prediction. The use of a diffusion model is a particularly interesting choice, as it can capture the diversity of possible future trajectories rather than just a single point estimate.
However, the paper does not deeply explore the limitations of this approach. For example, it's unclear how the model would perform in highly dynamic or crowded scenes where the future trajectory may depend on interactions with other agents. Additionally, the paper does not address potential privacy or ethical concerns around the use of egocentric vision and human trajectory prediction in real-world applications.
Further research could investigate ways to make the scene understanding more robust, perhaps by incorporating additional modalities beyond just the camera view. Exploring ways to provide users with greater transparency and control over the trajectory prediction process would also be valuable.
Conclusion
This paper makes an important contribution to the field of human trajectory prediction by demonstrating the value of incorporating detailed scene understanding. The proposed model's ability to generate diverse, plausible future trajectories has significant potential applications in areas like robot navigation, autonomous vehicles, and human-computer interaction.
While the paper has some limitations, it represents an exciting step forward in bridging the gap between perception of the environment and prediction of human behavior. As the field continues to advance, we can expect to see increasingly sophisticated models that can anticipate and adapt to the complexities of human movement in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
EgoNav: Egocentric Scene-aware Human Trajectory Prediction
Weizhuo Wang, C. Karen Liu, Monroe Kennedy III
Wearable collaborative robots stand to assist human wearers who need fall prevention assistance or wear exoskeletons. Such a robot needs to be able to constantly adapt to the surrounding scene based on egocentric vision, and predict the ego motion of the wearer. In this work, we leveraged body-mounted cameras and sensors to anticipate the trajectory of human wearers through complex surroundings. To facilitate research in ego-motion prediction, we have collected a comprehensive walking scene navigation dataset centered on the user's perspective. We then present a method to predict human motion conditioning on the surrounding static scene. Our method leverages a diffusion model to produce a distribution of potential future trajectories, taking into account the user's observation of the environment. To that end, we introduce a compact representation to encode the user's visual memory of the surroundings, as well as an efficient sample-generating technique to speed up real-time inference of a diffusion model. We ablate our model and compare it to baselines, and results show that our model outperforms existing methods on key metrics of collision avoidance and trajectory mode coverage.
Read more8/9/2024
🏷️
0
3D Human Pose Perception from Egocentric Stereo Videos
Hiroyasu Akada, Jian Wang, Vladislav Golyanik, Christian Theobalt
While head-mounted devices are becoming more compact, they provide egocentric views with significant self-occlusions of the device user. Hence, existing methods often fail to accurately estimate complex 3D poses from egocentric views. In this work, we propose a new transformer-based framework to improve egocentric stereo 3D human pose estimation, which leverages the scene information and temporal context of egocentric stereo videos. Specifically, we utilize 1) depth features from our 3D scene reconstruction module with uniformly sampled windows of egocentric stereo frames, and 2) human joint queries enhanced by temporal features of the video inputs. Our method is able to accurately estimate human poses even in challenging scenarios, such as crouching and sitting. Furthermore, we introduce two new benchmark datasets, i.e., UnrealEgo2 and UnrealEgo-RW (RealWorld). The proposed datasets offer a much larger number of egocentric stereo views with a wider variety of human motions than the existing datasets, allowing comprehensive evaluation of existing and upcoming methods. Our extensive experiments show that the proposed approach significantly outperforms previous methods. We will release UnrealEgo2, UnrealEgo-RW, and trained models on our project page.
Read more5/16/2024
0
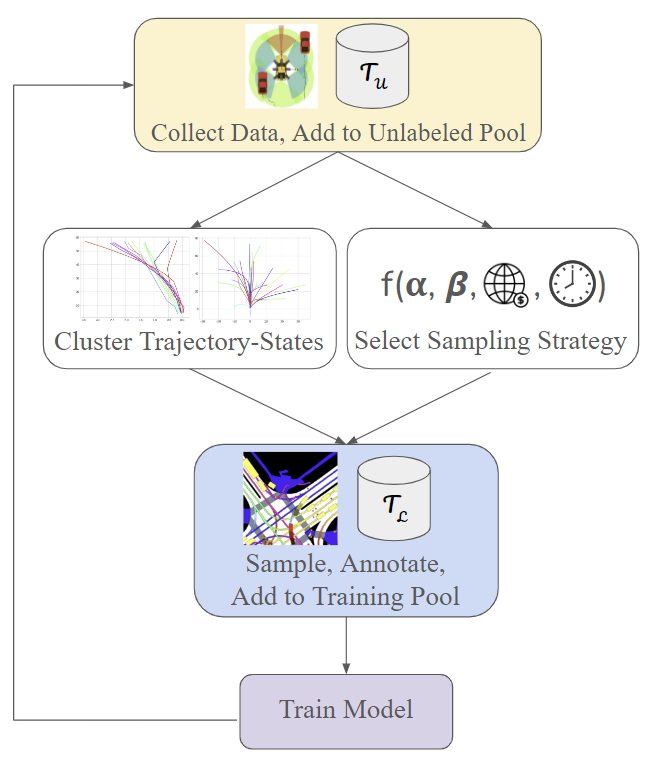
Perception Without Vision for Trajectory Prediction: Ego Vehicle Dynamics as Scene Representation for Efficient Active Learning in Autonomous Driving
Ross Greer, Mohan Trivedi
This study investigates the use of trajectory and dynamic state information for efficient data curation in autonomous driving machine learning tasks. We propose methods for clustering trajectory-states and sampling strategies in an active learning framework, aiming to reduce annotation and data costs while maintaining model performance. Our approach leverages trajectory information to guide data selection, promoting diversity in the training data. We demonstrate the effectiveness of our methods on the trajectory prediction task using the nuScenes dataset, showing consistent performance gains over random sampling across different data pool sizes, and even reaching sub-baseline displacement errors at just 50% of the data cost. Our results suggest that sampling typical data initially helps overcome the ''cold start problem,'' while introducing novelty becomes more beneficial as the training pool size increases. By integrating trajectory-state-informed active learning, we demonstrate that more efficient and robust autonomous driving systems are possible and practical using low-cost data curation strategies.
Read more5/21/2024

0
Motor Focus: Ego-Motion Prediction with All-Pixel Matching
Hao Wang, Jiayou Qin, Xiwen Chen, Ashish Bastola, John Suchanek, Zihao Gong, Abolfazl Razi
Motion analysis plays a critical role in various applications, from virtual reality and augmented reality to assistive visual navigation. Traditional self-driving technologies, while advanced, typically do not translate directly to pedestrian applications due to their reliance on extensive sensor arrays and non-feasible computational frameworks. This highlights a significant gap in applying these solutions to human users since human navigation introduces unique challenges, including the unpredictable nature of human movement, limited processing capabilities of portable devices, and the need for directional responsiveness due to the limited perception range of humans. In this project, we introduce an image-only method that applies motion analysis using optical flow with ego-motion compensation to predict Motor Focus-where and how humans or machines focus their movement intentions. Meanwhile, this paper addresses the camera shaking issue in handheld and body-mounted devices which can severely degrade performance and accuracy, by applying a Gaussian aggregation to stabilize the predicted motor focus area and enhance the prediction accuracy of movement direction. This also provides a robust, real-time solution that adapts to the user's immediate environment. Furthermore, in the experiments part, we show the qualitative analysis of motor focus estimation between the conventional dense optical flow-based method and the proposed method. In quantitative tests, we show the performance of the proposed method on a collected small dataset that is specialized for motor focus estimation tasks.
Read more4/29/2024