Embedded Graph Convolutional Networks for Real-Time Event Data Processing on SoC FPGAs

0
Sign in to get full access
Overview
- This paper presents a novel approach to real-time event data processing using embedded Graph Convolutional Networks (GCNs) on System-on-Chip (SoC) Field-Programmable Gate Arrays (FPGAs).
- The researchers focus on developing efficient and low-latency GCN architectures for event-based vision tasks, such as object classification, on resource-constrained embedded devices.
- The proposed solution aims to address the challenges of processing high-dimensional, asynchronous event data from sensors like event cameras in real-time.
Plain English Explanation
The paper describes a new way to process data from special cameras called "event cameras" in real-time, using a type of artificial intelligence called Graph Convolutional Networks (GCNs). Event cameras are different from traditional cameras because they only record changes in the scene, rather than capturing full frames. This produces a stream of "events" that need to be processed quickly and efficiently.
The researchers have developed a system that can run GCNs, a powerful type of AI model, directly on embedded devices like FPGAs. This allows the event data processing to happen right on the camera itself, without needing to send the data to a more powerful computer. The key advantages are that it can process the data very quickly (in real-time) and it uses less power, which is important for battery-powered devices.
The team's approach aims to make it easier to use event cameras for practical applications like robotics, augmented reality, and autonomous vehicles, where fast, efficient processing of visual information is critical. By bringing the AI processing closer to the sensor, they hope to unlock new possibilities for event-based vision systems.
Technical Explanation
The paper presents an embedded GCN architecture for processing event data from cameras on resource-constrained SoC FPGA platforms. The researchers address the challenges of low-latency, event-driven processing by co-designing the GCN model and hardware implementation.
The proposed solution includes several key innovations:
- Compact GCN Design: The GCN model is carefully optimized to reduce the number of parameters and computation, making it suitable for embedded devices.
- Event-Driven Processing: The architecture leverages the sparse, asynchronous nature of event data to enable efficient online processing without the need for batching.
- Hardware Acceleration: The GCN is implemented in hardware on the FPGA to achieve high throughput and low latency.
The researchers evaluate their approach on an event-based object classification task using the N-MNIST dataset. The results demonstrate the ability to achieve real-time performance on embedded devices while maintaining high accuracy.
Critical Analysis
The paper presents a compelling approach to addressing the challenges of processing event-based vision data on resource-constrained embedded devices. The co-design of the GCN model and hardware acceleration is a key strength, as it allows the system to fully leverage the characteristics of the event data.
However, the paper does not discuss the potential limitations of the proposed approach. For example, the performance and power efficiency of the system may depend on the specific event camera and FPGA hardware used, and the generalization of the GCN model to other event-based vision tasks remains to be explored.
Additionally, the paper could have provided more details on the trade-offs and design choices made during the optimization of the GCN model and hardware implementation. This would give readers a better understanding of the design process and the factors considered in balancing performance, accuracy, and resource utilization.
Conclusion
This paper introduces an innovative approach to real-time event data processing using embedded Graph Convolutional Networks on SoC FPGAs. By co-designing the GCN model and hardware acceleration, the researchers have demonstrated the ability to achieve high-performance, low-latency event-based vision processing on resource-constrained embedded devices.
The proposed solution has the potential to unlock new applications and use cases for event-based vision systems, such as in robotics, augmented reality, and autonomous vehicles, where fast and efficient processing of visual information is critical. The work represents an important step forward in the field of embedded machine learning for event-driven sensing and perception.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Embedded Graph Convolutional Networks for Real-Time Event Data Processing on SoC FPGAs
Kamil Jeziorek, Piotr Wzorek, Krzysztof Blachut, Andrea Pinna, Tomasz Kryjak
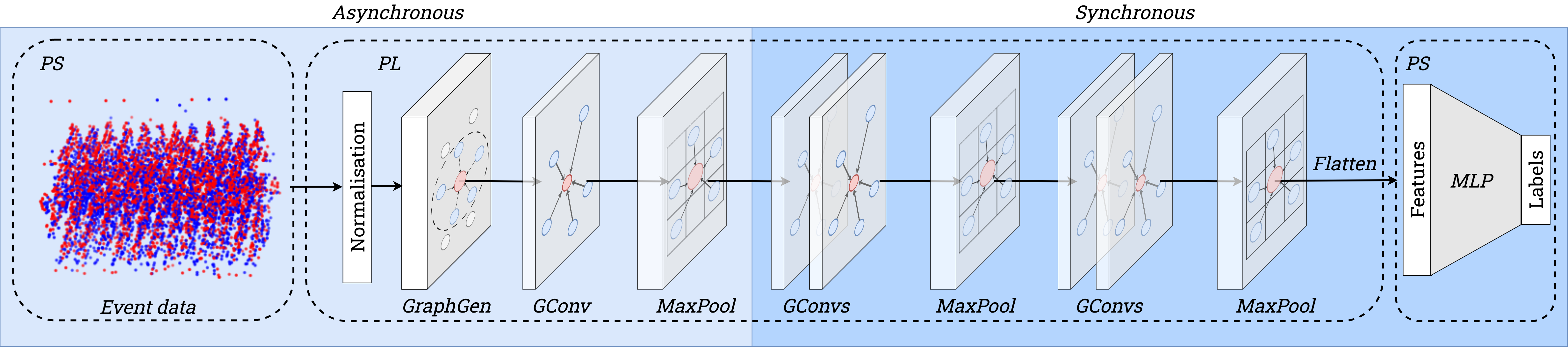
The utilisation of event cameras represents an important and swiftly evolving trend aimed at addressing the constraints of traditional video systems. Particularly within the automotive domain, these cameras find significant relevance for their integration into embedded real-time systems due to lower latency and energy consumption. One effective approach to ensure the necessary throughput and latency for event processing systems is through the utilisation of graph convolutional networks (GCNs). In this study, we introduce a series of hardware-aware optimisations tailored for PointNet++, a GCN architecture designed for point cloud processing. The proposed techniques result in more than a 100-fold reduction in model size compared to Asynchronous Event-based GNN (AEGNN), one of the most recent works in the field, with a relatively small decrease in accuracy (2.3% for N-Caltech101 classification, 1.7% for N-Cars classification), thus following the TinyML trend. Based on software research, we designed a custom EFGCN (Event-Based FPGA-accelerated Graph Convolutional Network) and we implemented it on ZCU104 SoC FPGA platform, achieving a throughput of 13.3 million events per second (MEPS) and real-time partially asynchronous processing with a latency of 4.47 ms. We also address the scalability of the proposed hardware model to improve the obtained accuracy score. To the best of our knowledge, this study marks the first endeavour in accelerating PointNet++ networks on SoC FPGAs, as well as the first hardware architecture exploration of graph convolutional networks implementation for real-time continuous event data processing. We publish both software and hardware source code in an open repository: https://github.com/vision-agh/*** (will be published upon acceptance).
Read more6/12/2024
🧠
0
EvGNN: An Event-driven Graph Neural Network Accelerator for Edge Vision
Yufeng Yang, Adrian Kneip, Charlotte Frenkel
Edge vision systems combining sensing and embedded processing promise low-latency, decentralized, and energy-efficient solutions that forgo reliance on the cloud. As opposed to conventional frame-based vision sensors, event-based cameras deliver a microsecond-scale temporal resolution with sparse information encoding, thereby outlining new opportunities for edge vision systems. However, mainstream algorithms for frame-based vision, which mostly rely on convolutional neural networks (CNNs), can hardly exploit the advantages of event-based vision as they are typically optimized for dense matrix-vector multiplications. While event-driven graph neural networks (GNNs) have recently emerged as a promising solution for sparse event-based vision, their irregular structure is a challenge that currently hinders the design of efficient hardware accelerators. In this paper, we propose EvGNN, the first event-driven GNN accelerator for low-footprint, ultra-low-latency, and high-accuracy edge vision with event-based cameras. It relies on three central ideas: (i) directed dynamic graphs exploiting single-hop nodes with edge-free storage, (ii) event queues for the efficient identification of local neighbors within a spatiotemporally decoupled search range, and (iii) a novel layer-parallel processing scheme enabling the low-latency execution of multi-layer GNNs. We deployed EvGNN on a Xilinx KV260 Ultrascale+ MPSoC platform and benchmarked it on the N-CARS dataset for car recognition, demonstrating a classification accuracy of 87.8% and an average latency per event of 16$mu$s, thereby enabling real-time, microsecond-resolution event-based vision at the edge.
Read more5/1/2024

0
Co-designing a Sub-millisecond Latency Event-based Eye Tracking System with Submanifold Sparse CNN
Baoheng Zhang, Yizhao Gao, Jingyuan Li, Hayden Kwok-Hay So
Eye-tracking technology is integral to numerous consumer electronics applications, particularly in the realm of virtual and augmented reality (VR/AR). These applications demand solutions that excel in three crucial aspects: low-latency, low-power consumption, and precision. Yet, achieving optimal performance across all these fronts presents a formidable challenge, necessitating a balance between sophisticated algorithms and efficient backend hardware implementations. In this study, we tackle this challenge through a synergistic software/hardware co-design of the system with an event camera. Leveraging the inherent sparsity of event-based input data, we integrate a novel sparse FPGA dataflow accelerator customized for submanifold sparse convolution neural networks (SCNN). The SCNN implemented on the accelerator can efficiently extract the embedding feature vector from each representation of event slices by only processing the non-zero activations. Subsequently, these vectors undergo further processing by a gated recurrent unit (GRU) and a fully connected layer on the host CPU to generate the eye centers. Deployment and evaluation of our system reveal outstanding performance metrics. On the Event-based Eye-Tracking-AIS2024 dataset, our system achieves 81% p5 accuracy, 99.5% p10 accuracy, and 3.71 Mean Euclidean Distance with 0.7 ms latency while only consuming 2.29 mJ per inference. Notably, our solution opens up opportunities for future eye-tracking systems. Code is available at https://github.com/CASR-HKU/ESDA/tree/eye_tracking.
Read more4/23/2024

0
Event-based vision on FPGAs -- a survey
Tomasz Kryjak
In recent years there has been a growing interest in event cameras, i.e. vision sensors that record changes in illumination independently for each pixel. This type of operation ensures that acquisition is possible in very adverse lighting conditions, both in low light and high dynamic range, and reduces average power consumption. In addition, the independent operation of each pixel results in low latency, which is desirable for robotic solutions. Nowadays, Field Programmable Gate Arrays (FPGAs), along with general-purpose processors (GPPs/CPUs) and programmable graphics processing units (GPUs), are popular architectures for implementing and accelerating computing tasks. In particular, their usefulness in the embedded vision domain has been repeatedly demonstrated over the past 30 years, where they have enabled fast data processing (even in real-time) and energy efficiency. Hence, the combination of event cameras and reconfigurable devices seems to be a good solution, especially in the context of energy-efficient real-time embedded systems. This paper gives an overview of the most important works, where FPGAs have been used in different contexts to process event data. It covers applications in the following areas: filtering, stereovision, optical flow, acceleration of AI-based algorithms (including spiking neural networks) for object classification, detection and tracking, and applications in robotics and inspection systems. Current trends and challenges for such systems are also discussed.
Read more7/12/2024