Enabling Visual Recognition at Radio Frequency
2405.19516
0
0
Abstract
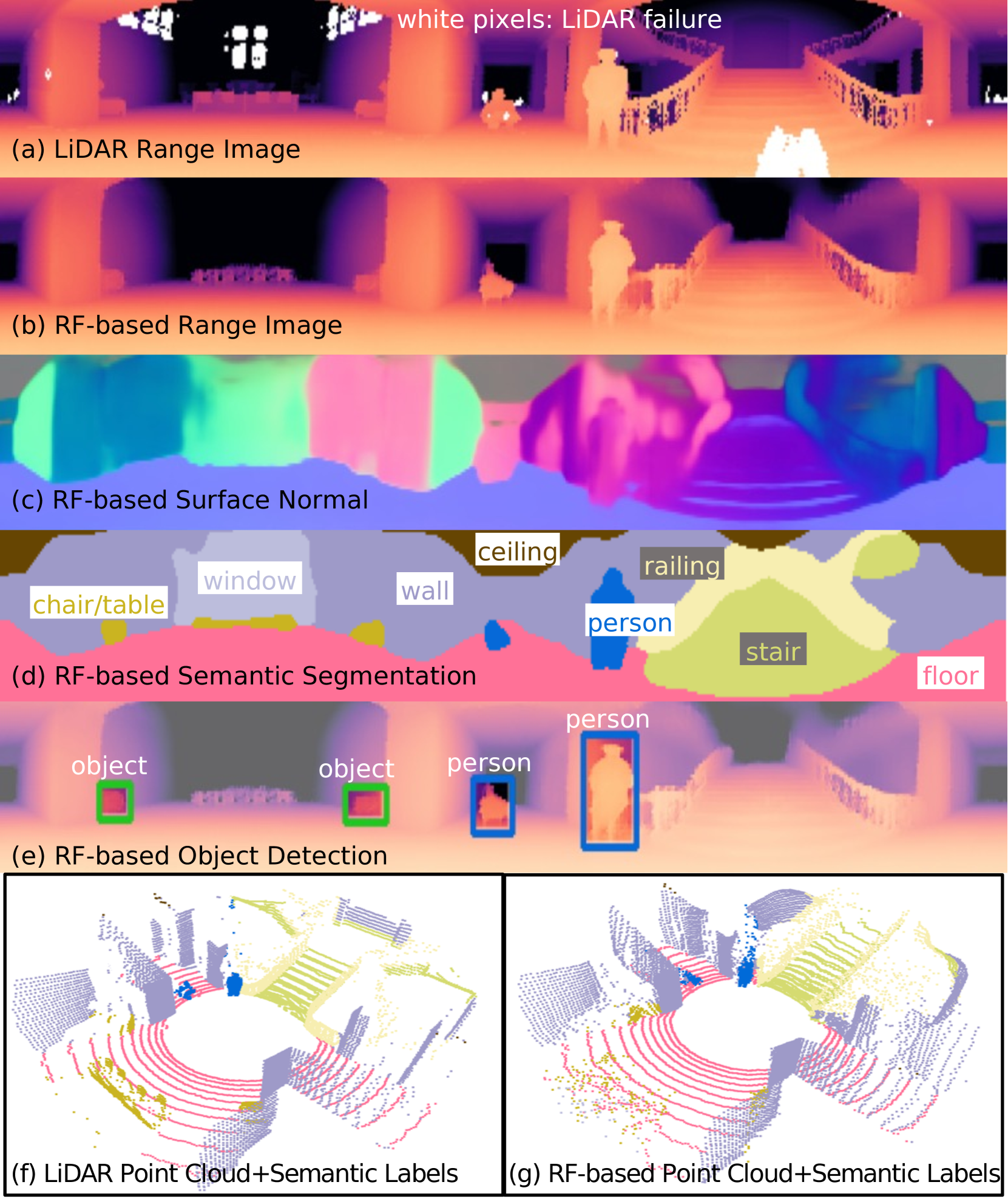
This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
Create account to get full access
Overview
- This paper introduces a novel approach to enabling visual recognition capabilities using radio frequency (RF) sensing technology, particularly millimeter-wave (mmWave) radar.
- The proposed system leverages the unique advantages of RF sensing, such as its ability to operate in diverse environments and its potential for 3D imaging, to complement traditional visual perception methods.
- The researchers develop a comprehensive framework that integrates egomotion estimation, 3D imaging, and robust perception to enable a wide range of visual recognition tasks using mmWave radar data.
Plain English Explanation
The paper describes a new way to use radio frequency (RF) technology, specifically millimeter-wave (mmWave) radar, to enable visual recognition capabilities. This is important because traditional visual perception methods, like camera-based systems, can be limited by environmental conditions like lighting or weather. The researchers have developed a system that can harness the unique advantages of RF sensing, such as its ability to operate in diverse environments and its potential for 3D imaging, to complement these traditional approaches.
At the core of this system is a comprehensive framework that integrates several key components. First, it can estimate the movement or "egomotion" of the sensor, which is crucial for understanding how the system is moving and perceiving the environment. Second, it can create detailed 3D images using the radar data, providing a more comprehensive view of the surroundings. Finally, the system utilizes robust perception algorithms to reliably recognize and identify objects, people, and other elements in the environment, even in challenging conditions.
By combining these capabilities, the researchers have created a powerful RF-based visual recognition system that can be used in a wide range of applications, from autonomous vehicles to robotic assistants. This technology has the potential to overcome the limitations of traditional vision systems and unlock new possibilities for how we interact with and perceive the world around us.
Technical Explanation
The paper presents a comprehensive framework for enabling visual recognition capabilities using radio frequency (RF) sensing, particularly millimeter-wave (mmWave) radar. The researchers develop a system that integrates three key components: egomotion estimation, 3D imaging, and robust perception.
Egomotion Estimation: The system first estimates the egomotion, or movement, of the sensor itself. This is crucial for understanding how the sensor is moving and perceiving the environment, which is necessary for accurately localizing and tracking objects.
3D Imaging: The framework then leverages the unique capabilities of mmWave radar to create detailed 3D images of the environment. By utilizing the high-resolution range and Doppler information provided by the radar, the system can construct a comprehensive 3D representation of the surroundings, which is essential for understanding the spatial relationships between objects.
Robust Perception: Finally, the system employs robust perception algorithms to reliably recognize and identify objects, people, and other elements in the environment. This component combines the 3D radar data with advanced machine learning techniques to enable visual recognition tasks, even in challenging conditions where traditional vision systems may struggle, such as low-light or adverse weather scenarios.
By integrating these three key components, the researchers have developed a comprehensive RF-based visual recognition framework that can complement traditional camera-based perception systems. The proposed approach harnesses the unique advantages of RF sensing, such as its ability to operate in diverse environments and its potential for 3D imaging, to enable a wide range of visual recognition tasks.
Critical Analysis
The paper presents a compelling and well-designed approach to leveraging RF sensing, particularly mmWave radar, for visual recognition tasks. The researchers have developed a comprehensive framework that addresses several key challenges in this domain, such as egomotion estimation, 3D imaging, and robust perception.
One particular strength of the proposed system is its ability to operate in diverse environmental conditions, where traditional vision-based systems may struggle. The use of mmWave radar technology allows the framework to perceive the environment accurately, even in low-light or adverse weather scenarios. This is a significant advantage, as it expands the potential applications of the technology, such as in autonomous vehicles or robotics.
However, the paper does acknowledge some limitations of the current approach. For example, the 3D imaging capabilities of the system are still limited in terms of resolution and accuracy compared to state-of-the-art camera-based 3D reconstruction methods. Additionally, the robust perception component may face challenges in scenarios with complex, cluttered environments or when dealing with small or occluded objects.
Further research and development are needed to address these limitations and fully unlock the potential of RF-based visual recognition systems. Potential areas for improvement include enhancing the 3D imaging algorithms, exploring multi-sensor fusion approaches that combine radar with other modalities (e.g., cameras, LiDAR), and advancing the robust perception techniques to handle more complex scenes and object types.
Despite these limitations, the research presented in this paper represents a significant step forward in the field of RF-based visual recognition. The comprehensive framework and the promising results demonstrate the viability of this approach and its potential to complement and enhance traditional vision-based perception systems in a wide range of applications.
Conclusion
This paper introduces a novel approach to enabling visual recognition capabilities using radio frequency (RF) sensing, particularly millimeter-wave (mmWave) radar. The researchers have developed a comprehensive framework that integrates egomotion estimation, 3D imaging, and robust perception to leverage the unique advantages of RF sensing and complement traditional vision-based perception methods.
The proposed system has the potential to overcome the limitations of camera-based systems, such as their sensitivity to environmental conditions, and unlock new possibilities for how we interact with and perceive the world around us. By combining the strengths of RF sensing with advanced machine learning techniques, the researchers have demonstrated a viable path forward for enabling robust and reliable visual recognition in diverse environments.
While there are still some challenges and limitations to be addressed, this research represents a significant step forward in the field of RF-based visual recognition. As the technology continues to evolve and the algorithms become more sophisticated, we can expect to see an increasing number of applications that harness the power of RF sensing for visual recognition tasks, from autonomous vehicles to robotic assistants and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
Talk2Radar: Bridging Natural Language with 4D mmWave Radar for 3D Referring Expression Comprehension
Runwei Guan, Ruixiao Zhang, Ningwei Ouyang, Jianan Liu, Ka Lok Man, Xiaohao Cai, Ming Xu, Jeremy Smith, Eng Gee Lim, Yutao Yue, Hui Xiong
0
0
Embodied perception is essential for intelligent vehicles and robots, enabling more natural interaction and task execution. However, these advancements currently embrace vision level, rarely focusing on using 3D modeling sensors, which limits the full understanding of surrounding objects with multi-granular characteristics. Recently, as a promising automotive sensor with affordable cost, 4D Millimeter-Wave radar provides denser point clouds than conventional radar and perceives both semantic and physical characteristics of objects, thus enhancing the reliability of perception system. To foster the development of natural language-driven context understanding in radar scenes for 3D grounding, we construct the first dataset, Talk2Radar, which bridges these two modalities for 3D Referring Expression Comprehension. Talk2Radar contains 8,682 referring prompt samples with 20,558 referred objects. Moreover, we propose a novel model, T-RadarNet for 3D REC upon point clouds, achieving state-of-the-art performances on Talk2Radar dataset compared with counterparts, where Deformable-FPN and Gated Graph Fusion are meticulously designed for efficient point cloud feature modeling and cross-modal fusion between radar and text features, respectively. Further, comprehensive experiments are conducted to give a deep insight into radar-based 3D REC. We release our project at https://github.com/GuanRunwei/Talk2Radar.
5/22/2024

Redefining Automotive Radar Imaging: A Domain-Informed 1D Deep Learning Approach for High-Resolution and Efficient Performance
Ruxin Zheng, Shunqiao Sun, Holger Caesar, Honglei Chen, Jian Li
0
0
Millimeter-wave (mmWave) radars are indispensable for perception tasks of autonomous vehicles, thanks to their resilience in challenging weather conditions. Yet, their deployment is often limited by insufficient spatial resolution for precise semantic scene interpretation. Classical super-resolution techniques adapted from optical imaging inadequately address the distinct characteristics of radar signal data. In response, our study redefines radar imaging super-resolution as a one-dimensional (1D) signal super-resolution spectra estimation problem by harnessing the radar signal processing domain knowledge, introducing innovative data normalization and a domain-informed signal-to-noise ratio (SNR)-guided loss function. Our tailored deep learning network for automotive radar imaging exhibits remarkable scalability, parameter efficiency and fast inference speed, alongside enhanced performance in terms of radar imaging quality and resolution. Extensive testing confirms that our SR-SPECNet sets a new benchmark in producing high-resolution radar range-azimuth images, outperforming existing methods across varied antenna configurations and dataset sizes. Source code and new radar dataset will be made publicly available online.
6/12/2024
🔮
RadarOcc: Robust 3D Occupancy Prediction with 4D Imaging Radar
Fangqiang Ding, Xiangyu Wen, Lawrence Zhu, Yiming Li, Chris Xiaoxuan Lu
0
0
3D occupancy-based perception pipeline has significantly advanced autonomous driving by capturing detailed scene descriptions and demonstrating strong generalizability across various object categories and shapes. Current methods predominantly rely on LiDAR or camera inputs for 3D occupancy prediction. These methods are susceptible to adverse weather conditions, limiting the all-weather deployment of self-driving cars. To improve perception robustness, we leverage the recent advances in automotive radars and introduce a novel approach that utilizes 4D imaging radar sensors for 3D occupancy prediction. Our method, RadarOcc, circumvents the limitations of sparse radar point clouds by directly processing the 4D radar tensor, thus preserving essential scene details. RadarOcc innovatively addresses the challenges associated with the voluminous and noisy 4D radar data by employing Doppler bins descriptors, sidelobe-aware spatial sparsification, and range-wise self-attention mechanisms. To minimize the interpolation errors associated with direct coordinate transformations, we also devise a spherical-based feature encoding followed by spherical-to-Cartesian feature aggregation. We benchmark various baseline methods based on distinct modalities on the public K-Radar dataset. The results demonstrate RadarOcc's state-of-the-art performance in radar-based 3D occupancy prediction and promising results even when compared with LiDAR- or camera-based methods. Additionally, we present qualitative evidence of the superior performance of 4D radar in adverse weather conditions and explore the impact of key pipeline components through ablation studies.
6/14/2024
🎲
Radarize: Enhancing Radar SLAM with Generalizable Doppler-Based Odometry
Emerson Sie, Xinyu Wu, Heyu Guo, Deepak Vasisht
0
0
Millimeter-wave (mmWave) radar is increasingly being considered as an alternative to optical sensors for robotic primitives like simultaneous localization and mapping (SLAM). While mmWave radar overcomes some limitations of optical sensors, such as occlusions, poor lighting conditions, and privacy concerns, it also faces unique challenges, such as missed obstacles due to specular reflections or fake objects due to multipath. To address these challenges, we propose Radarize, a self-contained SLAM pipeline that uses only a commodity single-chip mmWave radar. Our radar-native approach uses techniques such as Doppler shift-based odometry and multipath artifact suppression to improve performance. We evaluate our method on a large dataset of 146 trajectories spanning 4 buildings and mounted on 3 different platforms, totaling approximately 4.7 Km of travel distance. Our results show that our method outperforms state-of-the-art radar and radar-inertial approaches by approximately 5x in terms of odometry and 8x in terms of end-to-end SLAM, as measured by absolute trajectory error (ATE), without the need for additional sensors such as IMUs or wheel encoders.
4/30/2024