Talk2Radar: Bridging Natural Language with 4D mmWave Radar for 3D Referring Expression Comprehension
2405.12821
0
0
🌿
Abstract
Embodied perception is essential for intelligent vehicles and robots, enabling more natural interaction and task execution. However, these advancements currently embrace vision level, rarely focusing on using 3D modeling sensors, which limits the full understanding of surrounding objects with multi-granular characteristics. Recently, as a promising automotive sensor with affordable cost, 4D Millimeter-Wave radar provides denser point clouds than conventional radar and perceives both semantic and physical characteristics of objects, thus enhancing the reliability of perception system. To foster the development of natural language-driven context understanding in radar scenes for 3D grounding, we construct the first dataset, Talk2Radar, which bridges these two modalities for 3D Referring Expression Comprehension. Talk2Radar contains 8,682 referring prompt samples with 20,558 referred objects. Moreover, we propose a novel model, T-RadarNet for 3D REC upon point clouds, achieving state-of-the-art performances on Talk2Radar dataset compared with counterparts, where Deformable-FPN and Gated Graph Fusion are meticulously designed for efficient point cloud feature modeling and cross-modal fusion between radar and text features, respectively. Further, comprehensive experiments are conducted to give a deep insight into radar-based 3D REC. We release our project at https://github.com/GuanRunwei/Talk2Radar.
Create account to get full access
Overview
- This paper focuses on improving the perception capabilities of intelligent vehicles and robots through the use of 4D Millimeter-Wave radar technology.
- Traditional perception systems often rely solely on vision-based sensors, which can have limitations in understanding the full characteristics of surrounding objects.
- The authors propose a novel dataset called "Talk2Radar" that bridges the gap between natural language and 3D radar point clouds, enabling more natural interaction and task execution.
- They also introduce a model called "T-RadarNet" that achieves state-of-the-art performance on the Talk2Radar dataset for 3D Referring Expression Comprehension (3D REC).
Plain English Explanation
The paper discusses the importance of embodied perception for intelligent vehicles and robots, which means understanding the physical world around them in a more natural and intuitive way. Current perception systems often rely heavily on vision-level sensors, which can have limitations in fully understanding the characteristics of surrounding objects.
To address this, the authors explore the use of 4D Millimeter-Wave radar, a promising automotive sensor that can provide denser point clouds and perceive both semantic and physical characteristics of objects. This can enhance the reliability of the perception system.
To foster the development of natural language-driven context understanding in radar scenes, the authors construct the first dataset called "Talk2Radar," which bridges the gap between natural language and 3D radar point clouds. This dataset can be used to train models to better understand how people describe objects in a 3D radar scene.
The authors also propose a novel model called "T-RadarNet" that can perform 3D Referring Expression Comprehension (3D REC) on the Talk2Radar dataset, outperforming other approaches. This model uses Deformable-FPN and Gated Graph Fusion to efficiently model point cloud features and fuse radar and text features, respectively.
Technical Explanation
The paper presents a comprehensive approach to enhancing the perception capabilities of intelligent vehicles and robots through the use of 4D Millimeter-Wave radar technology.
The researchers first construct the "Talk2Radar" dataset, which contains 8,682 referring prompt samples with 20,558 referred objects. This dataset bridges the gap between natural language and 3D radar point clouds, enabling the development of models that can understand how people describe objects in a 3D radar scene.
The authors then propose a novel model called "T-RadarNet" for 3D Referring Expression Comprehension (3D REC) upon point clouds. This model achieves state-of-the-art performance on the Talk2Radar dataset compared to other approaches.
T-RadarNet incorporates several key components:
- Deformable-FPN: A feature pyramid network that can efficiently model point cloud features.
- Gated Graph Fusion: A module that enables effective cross-modal fusion between radar and text features.
The paper also includes comprehensive experiments and analyses to provide deeper insights into radar-based 3D REC. The authors release the Talk2Radar dataset and the T-RadarNet model to the research community.
Critical Analysis
The paper presents a valuable contribution to the field of embodied perception for intelligent vehicles and robots. The use of 4D Millimeter-Wave radar technology as a complementary sensor to traditional vision-based systems is a promising approach to enhance the understanding of the surrounding environment.
One potential limitation of the research is the scope of the Talk2Radar dataset, which focuses solely on 3D Referring Expression Comprehension. While this is an important task, the authors could consider expanding the dataset to include a wider range of perception-related tasks, such as object detection, segmentation, and scene understanding.
Additionally, the paper does not provide a detailed discussion of the potential limitations or failure cases of the T-RadarNet model. Further analysis of the model's performance in challenging or edge cases could help identify areas for improvement and guide future research.
The authors could also consider exploring the integration of the T-RadarNet model with other perception and control modules to demonstrate its real-world applicability in intelligent vehicle or robot systems. Transcrib3D, a related work on 3D referring expression resolution, could provide additional insights and opportunities for collaboration.
Overall, the paper presents a promising step forward in the development of more natural and reliable perception systems for intelligent vehicles and robots, with the potential to have a significant impact on the field.
Conclusion
This paper highlights the importance of embodied perception for intelligent vehicles and robots, and introduces a novel approach to enhance perception capabilities through the use of 4D Millimeter-Wave radar technology.
The authors construct the "Talk2Radar" dataset, which bridges the gap between natural language and 3D radar point clouds, and propose the "T-RadarNet" model for 3D Referring Expression Comprehension (3D REC). This model achieves state-of-the-art performance on the Talk2Radar dataset, demonstrating the potential of radar-based perception systems.
The research presented in this paper has important implications for the development of more natural and reliable interaction between intelligent systems and their environments, ultimately leading to more effective task execution and improved user experiences. The authors' efforts to make the dataset and model publicly available further contribute to the advancement of this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Enhanced Radar Perception via Multi-Task Learning: Towards Refined Data for Sensor Fusion Applications
Huawei Sun, Hao Feng, Gianfranco Mauro, Julius Ott, Georg Stettinger, Lorenzo Servadei, Robert Wille
0
0
Radar and camera fusion yields robustness in perception tasks by leveraging the strength of both sensors. The typical extracted radar point cloud is 2D without height information due to insufficient antennas along the elevation axis, which challenges the network performance. This work introduces a learning-based approach to infer the height of radar points associated with 3D objects. A novel robust regression loss is introduced to address the sparse target challenge. In addition, a multi-task training strategy is employed, emphasizing important features. The average radar absolute height error decreases from 1.69 to 0.25 meters compared to the state-of-the-art height extension method. The estimated target height values are used to preprocess and enrich radar data for downstream perception tasks. Integrating this refined radar information further enhances the performance of existing radar camera fusion models for object detection and depth estimation tasks.
4/10/2024
Enabling Visual Recognition at Radio Frequency
Haowen Lai, Gaoxiang Luo, Yifei Liu, Mingmin Zhao
0
0
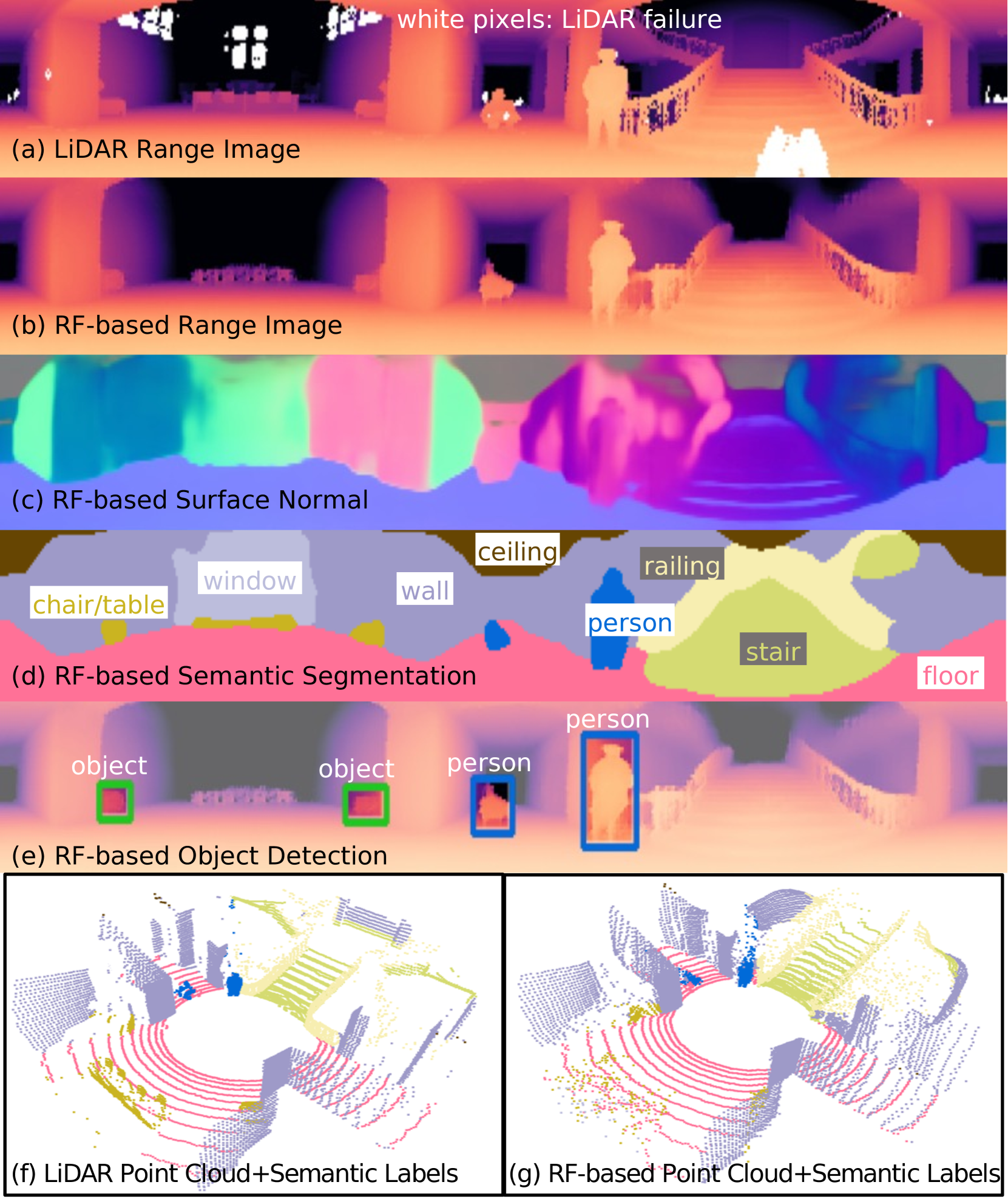
This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
5/31/2024
👁️
DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
Zeyu Han, Junkai Jiang, Xiaokang Ding, Qingwen Meng, Shaobing Xu, Lei He, Jianqiang Wang
0
0
The 4D millimeter-wave (mmWave) radar, with its robustness in extreme environments, extensive detection range, and capabilities for measuring velocity and elevation, has demonstrated significant potential for enhancing the perception abilities of autonomous driving systems in corner-case scenarios. Nevertheless, the inherent sparsity and noise of 4D mmWave radar point clouds restrict its further development and practical application. In this paper, we introduce a novel 4D mmWave radar point cloud detector, which leverages high-resolution dense LiDAR point clouds. Our approach constructs dense 3D occupancy ground truth from stitched LiDAR point clouds, and employs a specially designed network named DenserRadar. The proposed method surpasses existing probability-based and learning-based radar point cloud detectors in terms of both point cloud density and accuracy on the K-Radar dataset.
5/9/2024

Human Detection from 4D Radar Data in Low-Visibility Field Conditions
Mikael Skog, Oleksandr Kotlyar, Vladim'ir Kubelka, Martin Magnusson
0
0
Autonomous driving technology is increasingly being used on public roads and in industrial settings such as mines. While it is essential to detect pedestrians, vehicles, or other obstacles, adverse field conditions negatively affect the performance of classical sensors such as cameras or lidars. Radar, on the other hand, is a promising modality that is less affected by, e.g., dust, smoke, water mist or fog. In particular, modern 4D imaging radars provide target responses across the range, vertical angle, horizontal angle and Doppler velocity dimensions. We propose TMVA4D, a CNN architecture that leverages this 4D radar modality for semantic segmentation. The CNN is trained to distinguish between the background and person classes based on a series of 2D projections of the 4D radar data that include the elevation, azimuth, range, and Doppler velocity dimensions. We also outline the process of compiling a novel dataset consisting of data collected in industrial settings with a car-mounted 4D radar and describe how the ground-truth labels were generated from reference thermal images. Using TMVA4D on this dataset, we achieve an mIoU score of 78.2% and an mDice score of 86.1%, evaluated on the two classes background and person
4/9/2024