Enhanced Prediction of Multi-Agent Trajectories via Control Inference and State-Space Dynamics

0

Sign in to get full access
Overview
- Predicts trajectories of multiple agents by leveraging control inference and state-space dynamics
- Combines graph neural networks with physical models to enhance prediction accuracy
- Focuses on capturing the complex interactions and physical significance of agent movements
Plain English Explanation
This paper presents an approach to enhance the prediction of multi-agent trajectories. The key idea is to combine graph neural networks with physical models of agent dynamics to better capture the complex interactions and physical significance of how agents move.
Rather than relying solely on data-driven machine learning models, this method incorporates physical principles and control inference to enhance the prediction accuracy. By modeling the underlying dynamics and forces governing agent movements, the approach can better anticipate how trajectories will unfold, even in crowded or complex environments.
The key innovation is the way the method selectively incorporates relevant state-space information to capture the physical significance of the agents' movements. This allows the model to make more informed and realistic predictions compared to purely data-driven approaches.
Technical Explanation
The paper presents an enhanced framework for predicting the trajectories of multiple agents. The core idea is to combine graph neural networks with physical models of agent dynamics to better capture the complex interactions and underlying forces governing agent movements.
The approach leverages control inference and selective state-space dynamics to augment the graph neural network's data-driven predictions. By incorporating relevant physical principles, the method can make more informed and realistic forecasts, especially in crowded or complex environments.
The key technical contributions include:
- A graph neural network architecture that models agent-to-agent interactions
- A control inference module that estimates the latent control inputs driving agent movements
- A state-space dynamics module that selectively incorporates relevant physical constraints
By seamlessly integrating these components, the framework can better capture the physical significance of the agents' trajectories, leading to enhanced prediction accuracy.
Critical Analysis
The proposed framework represents an interesting step forward in multi-agent trajectory prediction by incorporating physical principles alongside data-driven machine learning techniques. The authors demonstrate the benefits of this hybrid approach, particularly in crowded or complex environments where purely data-driven models may struggle.
However, the paper does not fully address the potential limitations and challenges of this approach. For example, the selective state-space dynamics module may be sensitive to the accuracy of the underlying physical models, and the performance may degrade if these models do not fully capture the relevant dynamics. Additionally, the computational complexity of the combined graph neural network and physical modeling components may limit the scalability of the approach in real-world scenarios with a large number of agents.
Further research could explore ways to improve the robustness and efficiency of the proposed framework, such as by investigating more efficient physical modeling techniques or developing methods to automatically adapt the level of physical detail based on the complexity of the environment.
Conclusion
This paper presents an enhanced framework for predicting multi-agent trajectories that combines graph neural networks with control inference and selective state-space dynamics. By incorporating relevant physical principles, the approach can make more informed and realistic forecasts, particularly in crowded or complex environments where purely data-driven models may struggle.
The key innovation is the way the method selectively incorporates physical state-space information to capture the underlying forces and dynamics governing agent movements. This allows the model to better anticipate how trajectories will unfold, with potential applications in areas like autonomous navigation and multi-agent coordination.
While the proposed framework represents an interesting step forward, there are still potential limitations and areas for further research to improve its robustness and efficiency. Overall, this work demonstrates the value of combining physical principles with data-driven techniques to tackle complex challenges in multi-agent trajectory prediction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhanced Prediction of Multi-Agent Trajectories via Control Inference and State-Space Dynamics
Yu Zhang, Yongxiang Zou, Haoyu Zhang, Zeyu Liu, Houcheng Li, Long Cheng
In the field of autonomous systems, accurately predicting the trajectories of nearby vehicles and pedestrians is crucial for ensuring both safety and operational efficiency. This paper introduces a novel methodology for trajectory forecasting based on state-space dynamic system modeling, which endows agents with models that have tangible physical implications. To enhance the precision of state estimations within the dynamic system, the paper also presents a novel modeling technique for control variables. This technique utilizes a newly introduced model, termed Mixed Mamba, to derive initial control states, thereby improving the predictive accuracy of these variables. Moverover, the proposed approach ingeniously integrates graph neural networks with state-space models, effectively capturing the complexities of multi-agent interactions. This combination provides a robust and scalable framework for forecasting multi-agent trajectories across a range of scenarios. Comprehensive evaluations demonstrate that this model outperforms several established benchmarks across various metrics and datasets, highlighting its significant potential to advance trajectory forecasting in autonomous systems.
Read more8/26/2024
🔮
0
Enhancing Interaction Modeling with Agent Selection and Physical Methods for Trajectory Prediction
Shiji Huang, Lei Ye, Min Chen, Wenhai Luo, Chenqi Xu, Deyuan Liang, Dihong Wang
In this study, we address the limitations inherent in most existing vehicle trajectory prediction methodologies that indiscriminately incorporate all agents within a predetermined proximity when accounting for inter-agent interactions. These approaches commonly employ attention-based architecture or graph neural networks for encoding interactions, which introduces three challenges: (i) The indiscriminate selection of all nearby agents substantially escalates the computational demands of the model, particularly in those interaction-rich scenarios. (ii) Moreover, the simplistic feature extraction of current time agents falls short of adequately capturing the nuanced dynamics of interactions. (iii) Compounded by the inherently low interpretability of attention mechanism and graph neural networks, there is a propensity for the model to allocate unreliable correlation coefficients to certain agents, adversely impacting the accuracy of trajectory predictions. To mitigate these issues, we introduce ASPILin, a novel approach that enhances the selection of interacting agents by considering their current and future lanes, extending this consideration across all historical frames. Utilizing the states of the agents, we estimate the nearest future distance between agents and the time needed to reach this distance. Then, combine these with their current distances to derive a physical correlation coefficient to encode interactions. Experiments conducted on popular trajectory prediction datasets demonstrate that our method is efficient and straightforward, outperforming other state-of-the-art methods.
Read more5/24/2024
🔮
0
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Haicheng Liao, Zhenning Li, Chengyue Wang, Bonan Wang, Hanlin Kong, Yanchen Guan, Guofa Li, Zhiyong Cui, Chengzhong Xu
As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.
Read more4/29/2024
0
Motion Forecasting via Model-Based Risk Minimization
Aron Distelzweig, Eitan Kosman, Andreas Look, Faris Janjov{s}, Denesh K. Manivannan, Abhinav Valada
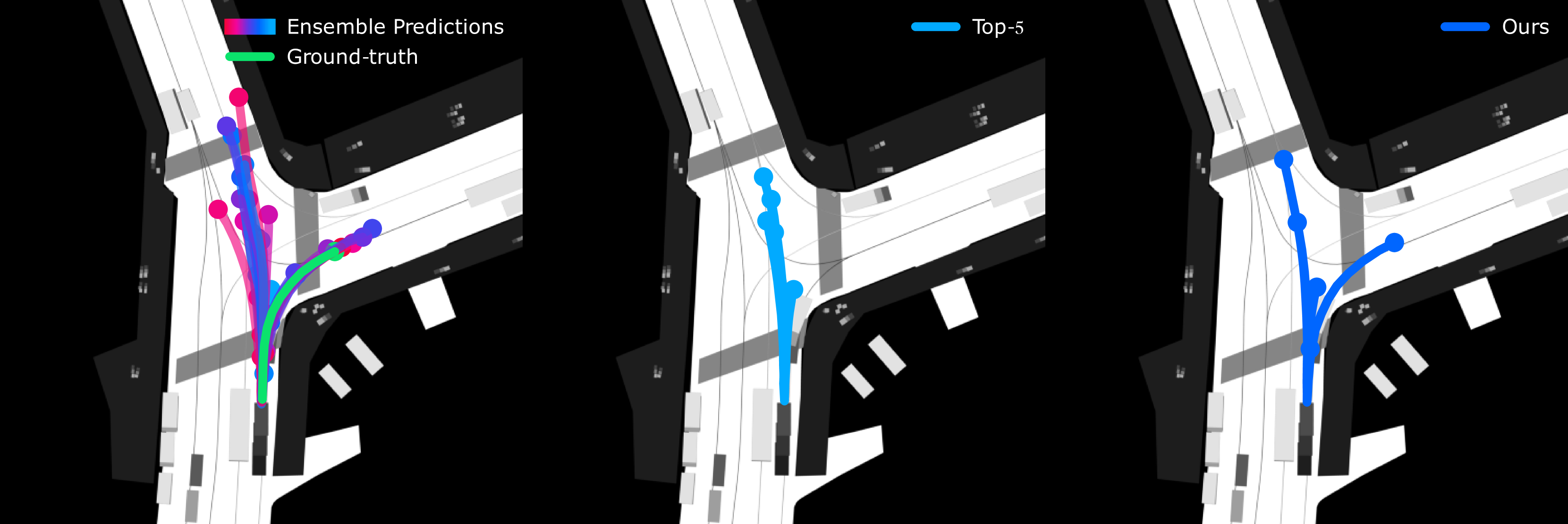
Forecasting the future trajectories of surrounding agents is crucial for autonomous vehicles to ensure safe, efficient, and comfortable route planning. While model ensembling has improved prediction accuracy in various fields, its application in trajectory prediction is limited due to the multi-modal nature of predictions. In this paper, we propose a novel sampling method applicable to trajectory prediction based on the predictions of multiple models. We first show that conventional sampling based on predicted probabilities can degrade performance due to missing alignment between models. To address this problem, we introduce a new method that generates optimal trajectories from a set of neural networks, framing it as a risk minimization problem with a variable loss function. By using state-of-the-art models as base learners, our approach constructs diverse and effective ensembles for optimal trajectory sampling. Extensive experiments on the nuScenes prediction dataset demonstrate that our method surpasses current state-of-the-art techniques, achieving top ranks on the leaderboard. We also provide a comprehensive empirical study on ensembling strategies, offering insights into their effectiveness. Our findings highlight the potential of advanced ensembling techniques in trajectory prediction, significantly improving predictive performance and paving the way for more reliable predicted trajectories.
Read more9/23/2024