Motion Forecasting via Model-Based Risk Minimization

0
Sign in to get full access
Overview
- The provided paper discusses a model-based approach to motion forecasting, which aims to predict the future trajectories of moving objects.
- The key idea is to minimize a risk function that captures the uncertainty and potential hazards in the predicted trajectories.
- The paper presents a technical framework and experimental results to demonstrate the effectiveness of this approach.
Plain English Explanation
The paper tackles the challenge of motion forecasting, which is the task of predicting the future paths that moving objects, like vehicles or pedestrians, will take. This is an important problem for applications like autonomous driving and robot navigation.
The key idea is to use a model-based approach that tries to minimize a "risk" function. This risk function captures the uncertainty and potential hazards in the predicted trajectories. For example, if a predicted trajectory puts an object in danger of colliding with another object, that would contribute to the overall risk.
By minimizing this risk function, the model can generate predictions that are not only likely to be accurate, but also aim to be safe and avoid dangerous situations. The paper presents a technical framework for implementing this approach and shows experimental results demonstrating its effectiveness.
Technical Explanation
The paper proposes a model-based approach to motion forecasting that seeks to minimize a risk function. This risk function is designed to capture the uncertainty and potential hazards in the predicted trajectories.
The framework consists of the following key components:
-
Trajectory Prediction Model: This is a machine learning model that takes in the current state of the moving object (e.g., its position, velocity, and other relevant features) and outputs a probability distribution over possible future trajectories.
-
Risk Function: The risk function is a mathematical expression that quantifies the undesirability of a predicted trajectory. It incorporates factors such as the uncertainty in the prediction (e.g., how confident the model is in the prediction) and the potential hazards along the trajectory (e.g., proximity to obstacles).
-
Risk Minimization: The core of the approach is to train the trajectory prediction model to minimize the expected value of the risk function over the predicted trajectories. This encourages the model to generate predictions that are not only likely to be accurate, but also aim to be safe and avoid dangerous situations.
The paper presents experimental results on several motion forecasting datasets, demonstrating that the model-based risk minimization approach outperforms baseline methods in terms of both prediction accuracy and safety of the generated trajectories.
Critical Analysis
The paper presents a novel and promising approach to motion forecasting, but it also acknowledges several limitations and areas for further research:
-
Simplifying Assumptions: The risk function used in the paper makes several simplifying assumptions, such as independence between different risk factors. More complex and realistic risk functions could be explored in future work.
-
Computational Complexity: Minimizing the risk function during training can be computationally expensive, especially as the complexity of the risk function increases. Techniques to reduce the computational burden may be necessary for real-world applications.
-
Generalization to Diverse Scenarios: The paper focuses on motion forecasting in relatively simple, controlled environments. Extending the approach to handle more diverse and complex real-world scenarios, such as long-tailed trajectory distributions or multi-agent interactions, remains an important challenge.
-
Empirical Validation: While the experimental results are promising, more extensive empirical evaluation, including comparisons to a wider range of baseline methods and robustness tests, would further strengthen the case for the proposed approach.
Overall, the paper presents a thoughtful and innovative approach to motion forecasting that could have significant implications for applications like autonomous driving and robot navigation. Addressing the identified limitations and exploring further refinements of the model-based risk minimization framework could lead to substantial advancements in this important research area.
Conclusion
The provided paper introduces a model-based approach to motion forecasting that seeks to minimize a risk function capturing the uncertainty and potential hazards in predicted trajectories. This novel technique aims to generate accurate and safe predictions, which could have important applications in areas like autonomous driving and robot navigation.
While the paper presents promising experimental results, it also acknowledges several limitations and areas for future research, such as the simplifying assumptions in the risk function, the computational complexity of the approach, and the need for more extensive empirical validation. Addressing these challenges and further developing the model-based risk minimization framework could lead to significant advancements in the field of motion forecasting.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Motion Forecasting via Model-Based Risk Minimization
Aron Distelzweig, Eitan Kosman, Andreas Look, Faris Janjov{s}, Denesh K. Manivannan, Abhinav Valada
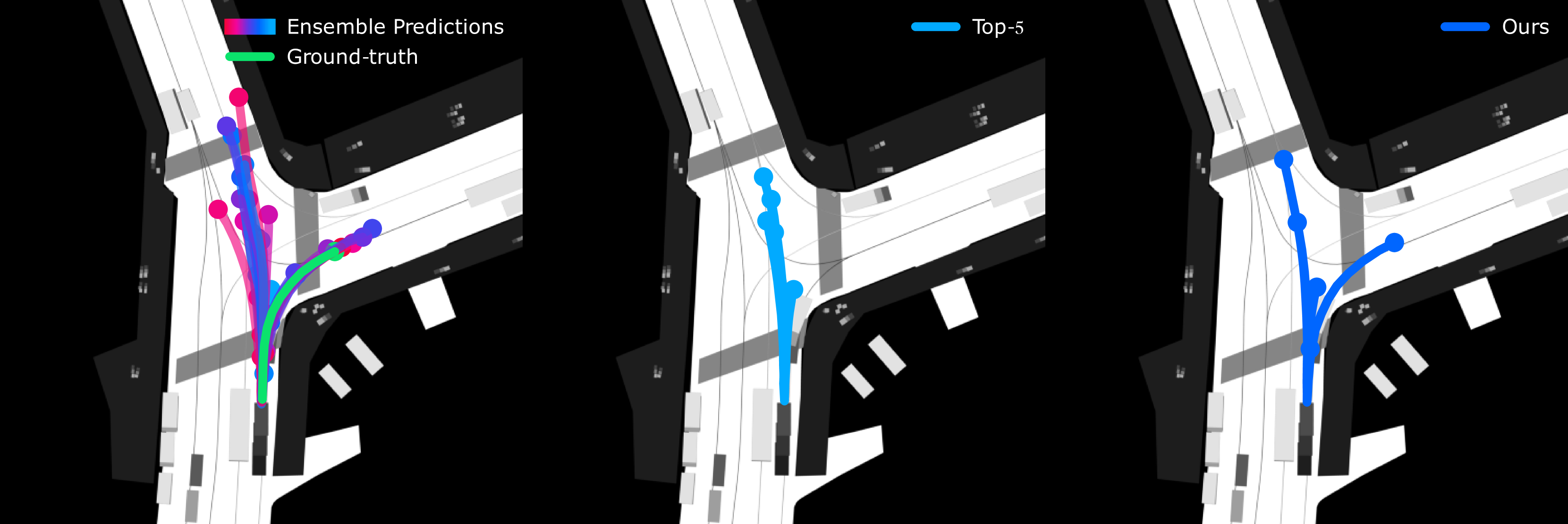
Forecasting the future trajectories of surrounding agents is crucial for autonomous vehicles to ensure safe, efficient, and comfortable route planning. While model ensembling has improved prediction accuracy in various fields, its application in trajectory prediction is limited due to the multi-modal nature of predictions. In this paper, we propose a novel sampling method applicable to trajectory prediction based on the predictions of multiple models. We first show that conventional sampling based on predicted probabilities can degrade performance due to missing alignment between models. To address this problem, we introduce a new method that generates optimal trajectories from a set of neural networks, framing it as a risk minimization problem with a variable loss function. By using state-of-the-art models as base learners, our approach constructs diverse and effective ensembles for optimal trajectory sampling. Extensive experiments on the nuScenes prediction dataset demonstrate that our method surpasses current state-of-the-art techniques, achieving top ranks on the leaderboard. We also provide a comprehensive empirical study on ensembling strategies, offering insights into their effectiveness. Our findings highlight the potential of advanced ensembling techniques in trajectory prediction, significantly improving predictive performance and paving the way for more reliable predicted trajectories.
Read more9/23/2024

0
Scaling Motion Forecasting Models with Ensemble Distillation
Scott Ettinger, Kratarth Goel, Avikalp Srivastava, Rami Al-Rfou
Motion forecasting has become an increasingly critical component of autonomous robotic systems. Onboard compute budgets typically limit the accuracy of real-time systems. In this work we propose methods of improving motion forecasting systems subject to limited compute budgets by combining model ensemble and distillation techniques. The use of ensembles of deep neural networks has been shown to improve generalization accuracy in many application domains. We first demonstrate significant performance gains by creating a large ensemble of optimized single models. We then develop a generalized framework to distill motion forecasting model ensembles into small student models which retain high performance with a fraction of the computing cost. For this study we focus on the task of motion forecasting using real world data from autonomous driving systems. We develop ensemble models that are very competitive on the Waymo Open Motion Dataset (WOMD) and Argoverse leaderboards. From these ensembles, we train distilled student models which have high performance at a fraction of the compute costs. These experiments demonstrate distillation from ensembles as an effective method for improving accuracy of predictive models for robotic systems with limited compute budgets.
Read more5/15/2024

0
New!Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Aron Distelzweig, Andreas Look, Eitan Kosman, Faris Janjov{s}, Jorg Wagner, Abhinav Valadaa
In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Read more10/3/2024

0
Multi-Agent Probabilistic Ensembles with Trajectory Sampling for Connected Autonomous Vehicles
Ruoqi Wen, Jiahao Huang, Rongpeng Li, Guoru Ding, Zhifeng Zhao
Autonomous Vehicles (AVs) have attracted significant attention in recent years and Reinforcement Learning (RL) has shown remarkable performance in improving the autonomy of vehicles. In that regard, the widely adopted Model-Free RL (MFRL) promises to solve decision-making tasks in connected AVs (CAVs), contingent on the readiness of a significant amount of data samples for training. Nevertheless, it might be infeasible in practice and possibly lead to learning instability. In contrast, Model-Based RL (MBRL) manifests itself in sample-efficient learning, but the asymptotic performance of MBRL might lag behind the state-of-the-art MFRL algorithms. Furthermore, most studies for CAVs are limited to the decision-making of a single AV only, thus underscoring the performance due to the absence of communications. In this study, we try to address the decision-making problem of multiple CAVs with limited communications and propose a decentralized Multi-Agent Probabilistic Ensembles with Trajectory Sampling algorithm MA-PETS. In particular, in order to better capture the uncertainty of the unknown environment, MA-PETS leverages Probabilistic Ensemble (PE) neural networks to learn from communicated samples among neighboring CAVs. Afterwards, MA-PETS capably develops Trajectory Sampling (TS)-based model-predictive control for decision-making. On this basis, we derive the multi-agent group regret bound affected by the number of agents within the communication range and mathematically validate that incorporating effective information exchange among agents into the multi-agent learning scheme contributes to reducing the group regret bound in the worst case. Finally, we empirically demonstrate the superiority of MA-PETS in terms of the sample efficiency comparable to MFBL.
Read more7/18/2024