Enhancing Agricultural Environment Perception via Active Vision and Zero-Shot Learning

0

Sign in to get full access
Overview
- This paper explores using active vision and zero-shot learning to enhance agricultural environment perception.
- The researchers propose a novel framework that combines active vision and zero-shot learning to better understand agricultural scenes.
- The framework is evaluated on several agricultural datasets, demonstrating improved performance compared to existing methods.
Plain English Explanation
The researchers in this paper are trying to develop better ways for computer vision systems to understand and perceive agricultural environments. Agricultural environments can be very complex, with many different objects, plants, and environmental conditions that need to be recognized and understood.
The researchers propose using a technique called "active vision" combined with "zero-shot learning". Active vision means the computer system can actively control the camera or sensor to get the best view of the scene, rather than just passively looking at an image. Zero-shot learning allows the system to recognize things it hasn't seen before, by learning from related concepts.
By combining these two approaches, the researchers hope to create a more robust and versatile computer vision system for agriculture. They test their framework on several agricultural datasets, and show that it outperforms existing methods at tasks like identifying different crops, weeds, and other important elements of the agricultural environment.
The key benefits of this approach are that it can handle the complexity of real-world agricultural scenes better than previous systems, and it can quickly adapt to new situations without requiring massive amounts of training data. This could lead to significant improvements in areas like precision farming, crop monitoring, and autonomous agricultural robots.
Technical Explanation
The paper presents a novel framework that combines active vision and zero-shot learning to enhance agricultural environment perception. The active vision component allows the system to dynamically control the camera viewpoint to obtain the most informative observations of the scene. The zero-shot learning component enables the recognition of novel objects and classes that were not present in the training data.
The framework consists of several key modules:
- An active vision module that plans the optimal camera trajectory to maximize information gain about the scene.
- A zero-shot recognition module that can identify objects and classes without requiring seen examples during training.
- A fusion module that integrates the active vision and zero-shot recognition outputs to produce a comprehensive understanding of the agricultural environment.
The researchers evaluate their framework on several agricultural datasets, including DAVIS-AG and Active-SLAM. The results demonstrate that their approach outperforms existing methods in tasks such as crop identification, weed detection, and scene understanding.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed framework, exploring its performance on multiple agricultural datasets. However, the authors acknowledge several limitations and areas for future work:
- The current framework is limited to static, single-view observations, and does not consider the dynamic nature of agricultural environments or the potential for collaborative perception across multiple agents.
- The zero-shot recognition module is based on semantic embeddings, which may not be optimal for all agricultural object classes. Exploring alternative zero-shot learning techniques could further improve performance.
- The active vision module is designed to maximize information gain, but may not always align with the ultimate goal of the agricultural task (e.g., crop yield prediction). Incorporating task-specific objectives could lead to more targeted active vision strategies.
Additionally, while the paper demonstrates the framework's effectiveness, more real-world deployments and user studies would be valuable to assess its practical implications and identify any additional challenges or requirements in the agricultural domain.
Conclusion
This paper presents a promising approach to enhancing agricultural environment perception through the integration of active vision and zero-shot learning. By dynamically controlling the camera viewpoint and leveraging the ability to recognize novel objects, the proposed framework shows significant improvements over existing methods in tasks such as crop identification and scene understanding.
The key contributions of this work lie in its ability to handle the complexity of real-world agricultural environments more effectively, as well as its potential for rapid adaptation to new situations without the need for extensive retraining. These advancements could have far-reaching implications for precision farming, autonomous agricultural robots, and other applications that rely on robust and adaptive computer vision systems in the agricultural domain.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Agricultural Environment Perception via Active Vision and Zero-Shot Learning
Michele Carlo La Greca, Mirko Usuelli, Matteo Matteucci
Agriculture, fundamental for human sustenance, faces unprecedented challenges. The need for efficient, human-cooperative, and sustainable farming methods has never been greater. The core contributions of this work involve leveraging Active Vision (AV) techniques and Zero-Shot Learning (ZSL) to improve the robot's ability to perceive and interact with agricultural environment in the context of fruit harvesting. The AV Pipeline implemented within ROS 2 integrates the Next-Best View (NBV) Planning for 3D environment reconstruction through a dynamic 3D Occupancy Map. Our system allows the robotics arm to dynamically plan and move to the most informative viewpoints and explore the environment, updating the 3D reconstruction using semantic information produced through ZSL models. Simulation and real-world experimental results demonstrate our system's effectiveness in complex visibility conditions, outperforming traditional and static predefined planning methods. ZSL segmentation models employed, such as YOLO World + EfficientViT SAM, exhibit high-speed performance and accurate segmentation, allowing flexibility when dealing with semantic information in unknown agricultural contexts without requiring any fine-tuning process.
Read more9/20/2024
0
Semantics-Aware Next-best-view Planning for Efficient Search and Detection of Task-relevant Plant Parts
Akshay K. Burusa, Joost Scholten, David Rapado Rincon, Xin Wang, Eldert J. van Henten, Gert Kootstra
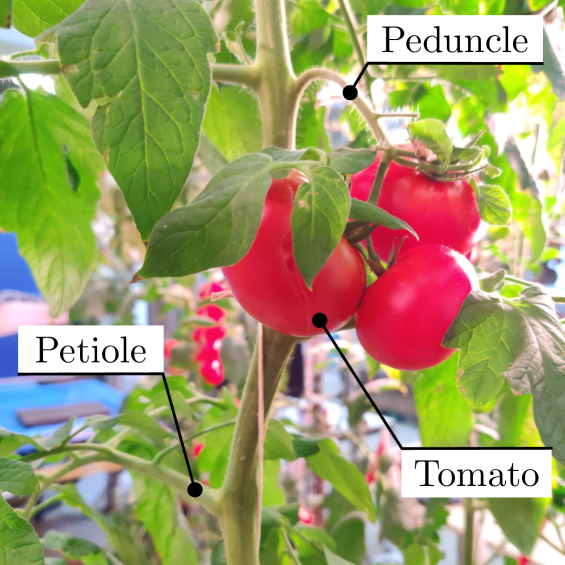
To automate harvesting and de-leafing of tomato plants using robots, it is important to search and detect the task-relevant plant parts. This is challenging due to high levels of occlusion in tomato plants. Active vision is a promising approach to viewpoint planning, which helps robots to deliberately plan camera viewpoints to overcome occlusion and improve perception accuracy. However, current active-vision algorithms cannot differentiate between relevant and irrelevant plant parts and spend time on perceiving irrelevant plant parts, making them inefficient for targeted perception. We propose a semantics-aware active-vision strategy that uses semantic information to identify the relevant plant parts and prioritise them during view planning. We evaluated our strategy on the task of searching and detecting the relevant plant parts using simulation and real-world experiments. In simulation, using 3D models of tomato plants with varying structural complexity, our semantics-aware strategy could search and detect 81.8% of all the relevant plant parts using nine viewpoints. It was significantly faster and detected more plant parts than predefined, random, and volumetric active-vision strategies. Our strategy was also robust to uncertainty in plant and plant-part position, plant complexity, and different viewpoint-sampling strategies. Further, in real-world experiments, our strategy could search and detect 82.7% of all the relevant plant parts using seven viewpoints, under real-world conditions with natural variation and occlusion, natural illumination, sensor noise, and uncertainty in camera poses. Our results clearly indicate the advantage of using semantics-aware active vision for targeted perception of plant parts and its applicability in real-world setups. We believe that it can significantly improve the speed and robustness of automated harvesting and de-leafing in tomato crop production.
Read more5/13/2024

0
A Vision-Based Navigation System for Arable Fields
Rajitha de Silva, Grzegorz Cielniak, Junfeng Gao
Vision-based navigation systems in arable fields are an underexplored area in agricultural robot navigation. Vision systems deployed in arable fields face challenges such as fluctuating weed density, varying illumination levels, growth stages and crop row irregularities. Current solutions are often crop-specific and aimed to address limited individual conditions such as illumination or weed density. Moreover, the scarcity of comprehensive datasets hinders the development of generalised machine learning systems for navigating these fields. This paper proposes a suite of deep learning-based perception algorithms using affordable vision sensors for vision-based navigation in arable fields. Initially, a comprehensive dataset that captures the intricacies of multiple crop seasons, various crop types, and a range of field variations was compiled. Next, this study delves into the creation of robust infield perception algorithms capable of accurately detecting crop rows under diverse conditions such as different growth stages, weed density, and varying illumination. Further, it investigates the integration of crop row following with vision-based crop row switching for efficient field-scale navigation. The proposed infield navigation system was tested in commercial arable fields traversing a total distance of 4.5 km with average heading and cross-track errors of 1.24{deg} and 3.32 cm respectively.
Read more5/29/2024

0
Active Collaborative Visual SLAM exploiting ORB Features
Muhammad Farhan Ahmed, Vincent Fr'emont, Isabelle Fantoni
In autonomous robotics, a significant challenge involves devising robust solutions for Active Collaborative SLAM (AC-SLAM). This process requires multiple robots to cooperatively explore and map an unknown environment by intelligently coordinating their movements and sensor data acquisition. In this article, we present an efficient visual AC-SLAM method using aerial and ground robots for environment exploration and mapping. We propose an efficient frontiers filtering method that takes into account the common IoU map frontiers and reduces the frontiers for each robot. Additionally, we also present an approach to guide robots to previously visited goal positions to promote loop closure to reduce SLAM uncertainty. The proposed method is implemented in ROS and evaluated through simulations on publicly available datasets and similar methods, achieving an accumulative average of 59% of increase in area coverage.
Read more9/10/2024