Enhancing octree-based context models for point cloud geometry compression with attention-based child node number prediction

0

Sign in to get full access
Overview
- This paper proposes a method to enhance octree-based context models for point cloud geometry compression using attention-based child node number prediction.
- The key ideas are to use an attention module to predict the number of child nodes in each octree node, and to incorporate this prediction into the context model to improve compression performance.
- The authors evaluate their approach on several point cloud datasets and compare it to state-of-the-art compression methods.
Plain English Explanation
Point clouds are 3D data representations that consist of a collection of individual points, each with its own spatial coordinates. They are commonly used in applications like 3D scanning, robotics, and virtual reality. Compressing point cloud data is important for efficient storage and transmission, but it is a challenging task.
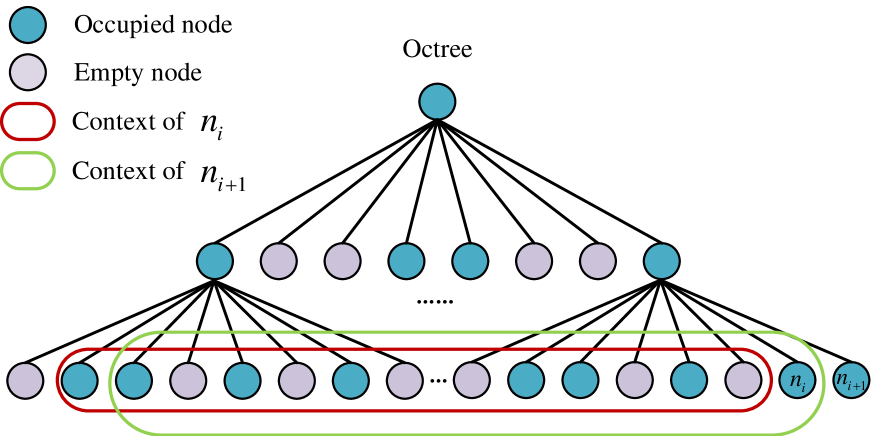
One common approach to point cloud compression is to use an octree-based context model. An octree is a tree-like data structure that recursively subdivides the 3D space into smaller cubes, called nodes. The context model uses information about the octree structure to predict the values of new nodes, which can then be encoded more efficiently.
The researchers in this paper proposed an enhancement to the octree-based context model. They added an attention module that predicts the number of child nodes in each octree node. This attention-based prediction is then incorporated into the context model to improve its compression performance.
The key idea is that by predicting the child node count, the context model can better anticipate the structure of the point cloud, leading to more accurate predictions and better compression. The authors tested their approach on several point cloud datasets and found that it outperformed other state-of-the-art compression methods.
Technical Explanation
The proposed method builds upon the octree-based context model approach for point cloud geometry compression. The core innovation is the addition of an attention-based module to predict the number of child nodes for each octree node.
The attention module takes the features of the current octree node as input and outputs a predicted child node count. This prediction is then incorporated into the context model, which uses the predicted child node count along with other features to encode the point cloud data more efficiently.
The authors evaluate their approach on several point cloud datasets, including PCN, GeoCC, and HPA. They compare the compression performance to other state-of-the-art methods and demonstrate that their attention-based approach outperforms the baseline octree-based context model.
Critical Analysis
The authors provide a thorough evaluation of their proposed method and discuss its limitations and potential areas for further research. One key limitation mentioned is the computational complexity of the attention module, which could impact the real-time performance of the compression algorithm.
Additionally, the authors note that their approach may not be as effective for highly irregular or sparse point clouds, as the attention-based prediction may not be as accurate in these cases. Further research could explore ways to adapt the method to handle a wider range of point cloud data characteristics.
Overall, the paper presents a promising enhancement to octree-based context models for point cloud compression, with the attention-based child node number prediction serving as a valuable contribution to the field. However, as with any research, there is room for further exploration and improvement to address the identified limitations and expand the applicability of the technique.
Conclusion
This paper introduces an attention-based enhancement to octree-based context models for point cloud geometry compression. By predicting the number of child nodes in each octree node, the context model can better anticipate the structure of the point cloud, leading to improved compression performance.
The proposed method was evaluated on several point cloud datasets and was shown to outperform other state-of-the-art compression techniques. While the approach has some limitations, it represents a valuable contribution to the ongoing efforts to develop efficient and effective point cloud compression algorithms, which are essential for a wide range of applications in fields such as 3D scanning, robotics, and virtual reality.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing octree-based context models for point cloud geometry compression with attention-based child node number prediction
Chang Sun, Hui Yuan, Xiaolong Mao, Xin Lu, Raouf Hamzaoui
In point cloud geometry compression, most octreebased context models use the cross-entropy between the onehot encoding of node occupancy and the probability distribution predicted by the context model as the loss. This approach converts the problem of predicting the number (a regression problem) and the position (a classification problem) of occupied child nodes into a 255-dimensional classification problem. As a result, it fails to accurately measure the difference between the one-hot encoding and the predicted probability distribution. We first analyze why the cross-entropy loss function fails to accurately measure the difference between the one-hot encoding and the predicted probability distribution. Then, we propose an attention-based child node number prediction (ACNP) module to enhance the context models. The proposed module can predict the number of occupied child nodes and map it into an 8- dimensional vector to assist the context model in predicting the probability distribution of the occupancy of the current node for efficient entropy coding. Experimental results demonstrate that the proposed module enhances the coding efficiency of octree-based context models.
Read more7/12/2024
0
Enhancing context models for point cloud geometry compression with context feature residuals and multi-loss
Chang Sun, Hui Yuan, Shuai Li, Xin Lu, Raouf Hamzaoui
In point cloud geometry compression, context models usually use the one-hot encoding of node occupancy as the label, and the cross-entropy between the one-hot encoding and the probability distribution predicted by the context model as the loss function. However, this approach has two main weaknesses. First, the differences between contexts of different nodes are not significant, making it difficult for the context model to accurately predict the probability distribution of node occupancy. Second, as the one-hot encoding is not the actual probability distribution of node occupancy, the cross-entropy loss function is inaccurate. To address these problems, we propose a general structure that can enhance existing context models. We introduce the context feature residuals into the context model to amplify the differences between contexts. We also add a multi-layer perception branch, that uses the mean squared error between its output and node occupancy as a loss function to provide accurate gradients in backpropagation. We validate our method by showing that it can improve the performance of an octree-based model (OctAttention) and a voxel-based model (VoxelDNN) on the object point cloud datasets MPEG 8i and MVUB, as well as the LiDAR point cloud dataset SemanticKITTI.
Read more7/12/2024

0
Towards Point Cloud Compression for Machine Perception: A Simple and Strong Baseline by Learning the Octree Depth Level Predictor
Lei Liu, Zhihao Hu, Zhenghao Chen
Point cloud compression has garnered significant interest in computer vision. However, existing algorithms primarily cater to human vision, while most point cloud data is utilized for machine vision tasks. To address this, we propose a point cloud compression framework that simultaneously handles both human and machine vision tasks. Our framework learns a scalable bit-stream, using only subsets for different machine vision tasks to save bit-rate, while employing the entire bit-stream for human vision tasks. Building on mainstream octree-based frameworks like VoxelContext-Net, OctAttention, and G-PCC, we introduce a new octree depth-level predictor. This predictor adaptively determines the optimal depth level for each octree constructed from a point cloud, controlling the bit-rate for machine vision tasks. For simpler tasks (textit{e.g.}, classification) or objects/scenarios, we use fewer depth levels with fewer bits, saving bit-rate. Conversely, for more complex tasks (textit{e.g}., segmentation) or objects/scenarios, we use deeper depth levels with more bits to enhance performance. Experimental results on various datasets (textit{e.g}., ModelNet10, ModelNet40, ShapeNet, ScanNet, and KITTI) show that our point cloud compression approach improves performance for machine vision tasks without compromising human vision quality.
Read more6/4/2024
0
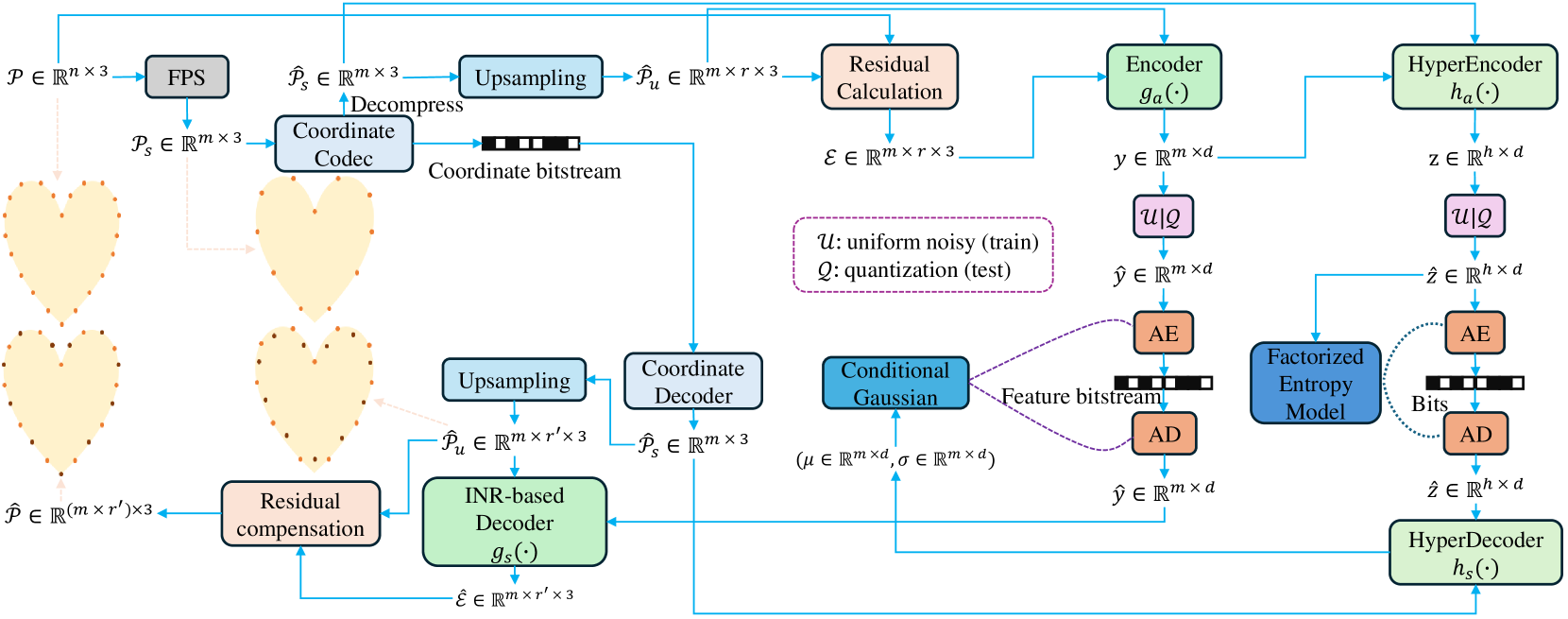
Fast Point Cloud Geometry Compression with Context-based Residual Coding and INR-based Refinement
Hao Xu, Xi Zhang, Xiaolin Wu
Compressing a set of unordered points is far more challenging than compressing images/videos of regular sample grids, because of the difficulties in characterizing neighboring relations in an irregular layout of points. Many researchers resort to voxelization to introduce regularity, but this approach suffers from quantization loss. In this research, we use the KNN method to determine the neighborhoods of raw surface points. This gives us a means to determine the spatial context in which the latent features of 3D points are compressed by arithmetic coding. As such, the conditional probability model is adaptive to local geometry, leading to significant rate reduction. Additionally, we propose a dual-layer architecture where a non-learning base layer reconstructs the main structures of the point cloud at low complexity, while a learned refinement layer focuses on preserving fine details. This design leads to reductions in model complexity and coding latency by two orders of magnitude compared to SOTA methods. Moreover, we incorporate an implicit neural representation (INR) into the refinement layer, allowing the decoder to sample points on the underlying surface at arbitrary densities. This work is the first to effectively exploit content-aware local contexts for compressing irregular raw point clouds, achieving high rate-distortion performance, low complexity, and the ability to function as an arbitrary-scale upsampling network simultaneously.
Read more8/7/2024