Enhancing Socially-Aware Robot Navigation through Bidirectional Natural Language Conversation

0

Sign in to get full access
Overview
- This paper proposes a novel approach to enhance socially-aware robot navigation by incorporating bidirectional natural language conversation between the robot and humans.
- The key idea is to enable the robot to engage in two-way dialogue to better understand social cues and navigate in a more natural, human-like manner.
- The authors design a system that allows the robot to communicate with humans, ask clarifying questions, and adapt its navigation accordingly.
Plain English Explanation
The researchers developed a robot that can have natural conversations with people to improve how it navigates through social environments. Typically, robots are programmed to just follow pre-determined paths, which can sometimes come across as awkward or unnatural around humans. This new approach allows the robot to ask people questions and get feedback, so it can adjust its movement in a more socially appropriate way.
For example, if the robot encounters a group of people having a conversation, it can politely ask "Excuse me, would it be alright if I pass through here?" and then adjust its speed and path based on the response. This back-and-forth dialogue helps the robot better understand the social context and move in a way that is considerate of the people around it.
The key benefit is that the robot can navigate more naturally and avoid awkward or disruptive behaviors. This makes the interaction between humans and robots smoother and more comfortable. It's an important step towards developing robots that can seamlessly integrate into our everyday lives.
Technical Explanation
The paper presents a framework for socially-aware robot navigation that employs bidirectional natural language conversation. The system consists of several key components:
- Natural Language Understanding: The robot uses natural language processing to comprehend the meaning and intent behind human responses, allowing it to interpret social cues.
- Dialogue Management: The robot engages in multi-turn conversations, asking clarifying questions and generating appropriate responses based on the dialogue context.
- Socially-Aware Navigation: Based on the information gathered through conversation, the robot adjusts its navigation path, speed, and other behaviors to be more considerate of the social environment.
The authors evaluate their approach through simulation experiments and user studies, demonstrating that the robot's ability to engage in natural language dialogue leads to more socially acceptable navigation behaviors compared to traditional navigation methods.
Critical Analysis
The paper presents a compelling approach to enhancing robot navigation in social settings, but there are a few potential limitations and areas for further research:
- Scalability and Generalization: The system was evaluated in relatively constrained scenarios, and it's unclear how well it would scale to more complex, real-world environments with larger numbers of people and dynamic social interactions.
- Ethical Considerations: The paper does not discuss potential ethical concerns, such as privacy implications or the impact of robots engaging in deceptive or manipulative behaviors during conversations.
- Multimodal Integration: The current system relies primarily on natural language, but incorporating other social cues, such as body language and facial expressions, could further enhance the robot's social awareness and navigation abilities.
Overall, the research presents an important step forward in developing socially-aware robot navigation systems, but more work is needed to address the practical and ethical challenges of deploying such technologies in the real world.
Conclusion
This paper introduces a novel approach to enhancing robot navigation in social environments through the use of bidirectional natural language conversation. By enabling robots to engage in dialogue with humans, understand social cues, and adapt their behaviors accordingly, the researchers have developed a system that allows for more natural and considerate robot navigation.
The findings from this work have significant implications for the development of robots that can seamlessly integrate into human spaces and interact with people in a socially appropriate manner. As robots become more ubiquitous in our daily lives, this type of socially-aware navigation will be crucial for ensuring a smooth and comfortable coexistence between humans and machines.
While there are still challenges to be addressed, this research represents an important step forward in the field of socially-aware robotics and offers a promising direction for future work in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Socially-Aware Robot Navigation through Bidirectional Natural Language Conversation
Congcong Wen, Yifan Liu, Geeta Chandra Raju Bethala, Zheng Peng, Hui Lin, Yu-Shen Liu, Yi Fang
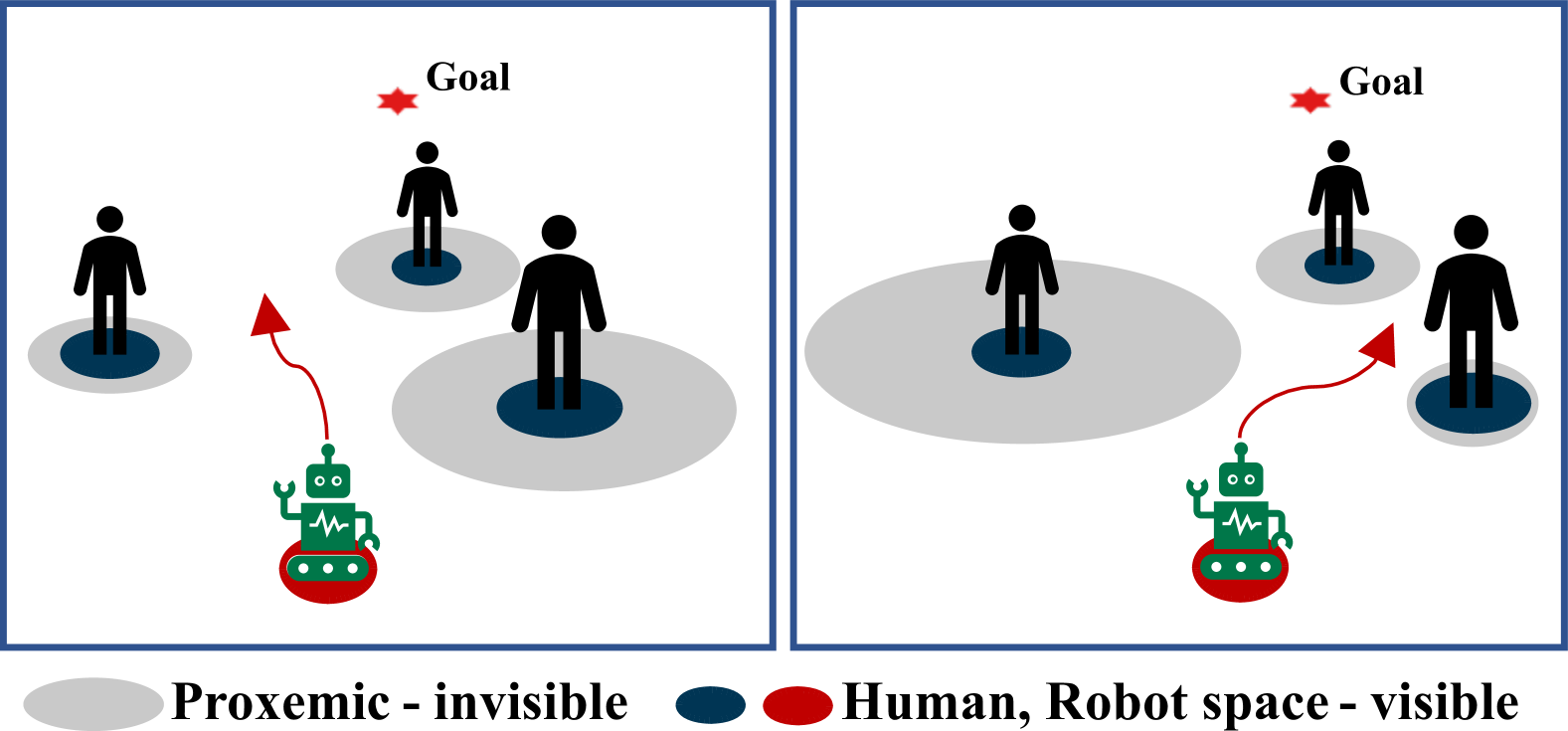
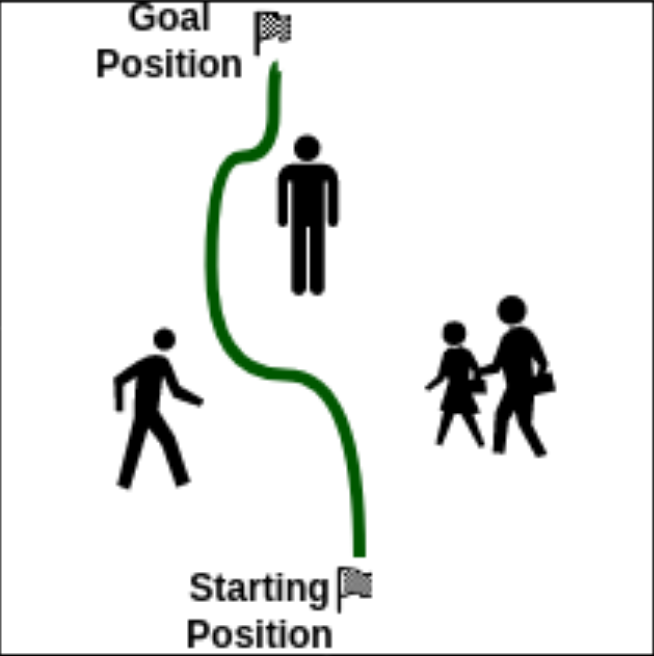
Robot navigation is an important research field with applications in various domains. However, traditional approaches often prioritize efficiency and obstacle avoidance, neglecting a nuanced understanding of human behavior or intent in shared spaces. With the rise of service robots, there's an increasing emphasis on endowing robots with the capability to navigate and interact in complex real-world environments. Socially aware navigation has recently become a key research area. However, existing work either predicts pedestrian movements or simply emits alert signals to pedestrians, falling short of facilitating genuine interactions between humans and robots. In this paper, we introduce the Hybrid Soft Actor-Critic with Large Language Model (HSAC-LLM), an innovative model designed for socially-aware navigation in robots. This model seamlessly integrates deep reinforcement learning with large language models, enabling it to predict both continuous and discrete actions for navigation. Notably, HSAC-LLM facilitates bidirectional interaction based on natural language with pedestrian models. When a potential collision with pedestrians is detected, the robot can initiate or respond to communications with pedestrians, obtaining and executing subsequent avoidance strategies. Experimental results in 2D simulation, the Gazebo environment, and the real-world environment demonstrate that HSAC-LLM not only efficiently enables interaction with humans but also exhibits superior performance in navigation and obstacle avoidance compared to state-of-the-art DRL algorithms. We believe this innovative paradigm opens up new avenues for effective and socially aware human-robot interactions in dynamic environments. Videos are available at https://hsacllm.github.io/.
Read more9/10/2024
0
Socially Integrated Navigation: A Social Acting Robot with Deep Reinforcement Learning
Daniel Flogel, Lars Fischer, Thomas Rudolf, Tobias Schurmann, Soren Hohmann
Mobile robots are being used on a large scale in various crowded situations and become part of our society. The socially acceptable navigation behavior of a mobile robot with individual human consideration is an essential requirement for scalable applications and human acceptance. Deep Reinforcement Learning (DRL) approaches are recently used to learn a robot's navigation policy and to model the complex interactions between robots and humans. We propose to divide existing DRL-based navigation approaches based on the robot's exhibited social behavior and distinguish between social collision avoidance with a lack of social behavior and socially aware approaches with explicit predefined social behavior. In addition, we propose a novel socially integrated navigation approach where the robot's social behavior is adaptive and emerges from the interaction with humans. The formulation of our approach is derived from a sociological definition, which states that social acting is oriented toward the acting of others. The DRL policy is trained in an environment where other agents interact socially integrated and reward the robot's behavior individually. The simulation results indicate that the proposed socially integrated navigation approach outperforms a socially aware approach in terms of ego navigation performance while significantly reducing the negative impact on all agents within the environment.
Read more7/29/2024
0
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
Read more5/3/2024
0
VLM-Social-Nav: Socially Aware Robot Navigation through Scoring using Vision-Language Models
Daeun Song, Jing Liang, Amirreza Payandeh, Xuesu Xiao, Dinesh Manocha
We propose VLM-Social-Nav, a novel Vision-Language Model (VLM) based navigation approach to compute a robot's motion in human-centered environments. Our goal is to make real-time decisions on robot actions that are socially compliant with human expectations. We utilize a perception model to detect important social entities and prompt a VLM to generate guidance for socially compliant robot behavior. VLM-Social-Nav uses a VLM-based scoring module that computes a cost term that ensures socially appropriate and effective robot actions generated by the underlying planner. Our overall approach reduces reliance on large training datasets and enhances adaptability in decision-making. In practice, it results in improved socially compliant navigation in human-shared environments. We demonstrate and evaluate our system in four different real-world social navigation scenarios with a Turtlebot robot. We observe at least 27.38% improvement in the average success rate and 19.05% improvement in the average collision rate in the four social navigation scenarios. Our user study score shows that VLM-Social-Nav generates the most socially compliant navigation behavior.
Read more7/9/2024