Socially Integrated Navigation: A Social Acting Robot with Deep Reinforcement Learning

0
Sign in to get full access
Overview
- This paper presents a deep reinforcement learning approach for socially integrated navigation, where a robot learns to navigate in a human environment while considering social cues and norms.
- The robot is trained to take actions that are not only effective for reaching its goal, but also socially appropriate and acceptable to nearby humans.
- The research aims to develop robots that can seamlessly integrate into human environments and interact with people in a natural, intuitive way.
Plain English Explanation
The paper describes a new way for robots to navigate through spaces where there are people. Typically, robots are just focused on getting to their destination as quickly as possible. But in many real-world settings, like an office or a shopping mall, robots need to be able to move around in a way that is considerate of the people nearby.
The researchers trained a robot using a technique called deep reinforcement learning. This allowed the robot to learn how to navigate while also taking social factors into account. For example, the robot learned to avoid getting too close to people, to yield the right-of-way, and to move in a way that doesn't startle or disturb nearby humans.
By training the robot to be "socially aware", the researchers aimed to develop a robot that can seamlessly integrate into human environments and interact with people in a natural, intuitive way. This is an important step towards making robots that can be useful assistants in our everyday lives, rather than just industrial tools.
Technical Explanation
The core of the paper is a deep reinforcement learning approach for socially integrated navigation. The researchers developed a reward function that encourages the robot to not only reach its goal efficiently, but also to behave in a socially appropriate manner.
The reward function includes terms that penalize the robot for getting too close to people, for cutting people off, and for making sudden movements that could startle nearby humans. There are also positive rewards for the robot maintaining a comfortable distance from people, yielding the right-of-way, and generally moving in a smooth and predictable way.
The robot's policy is represented by a deep neural network that takes in information about the robot's state (position, orientation, etc.) as well as the state of nearby humans (position, velocity, etc.). The network then outputs the robot's chosen actions (speed, steering, etc.).
Through training in simulation, the robot learns to balance the objectives of efficient navigation and socially appropriate behavior. The researchers show that this socially integrated approach leads to more natural, human-like navigation compared to a traditional navigation-only approach.
Critical Analysis
One limitation of the research is that it was entirely conducted in simulation, without any real-world testing. While the simulated environments were designed to closely resemble real-world settings, there may be additional complexities and unpredictabilities that arise when deploying the system in the physical world.
Additionally, the paper does not explore how the robot's socially aware navigation might scale to more crowded or dynamic environments with a larger number of humans present. The experiments only involved a small number of people, and it's unclear how the approach would perform in a busier setting.
Further research could also investigate how the robot's social navigation skills might transfer to different cultural contexts, where the expected norms and etiquette for interpersonal space and movement may vary. The current work is limited to a Western cultural perspective.
Overall, the research represents an important step towards developing robots that can seamlessly integrate into human environments. However, additional real-world validation and exploration of edge cases would be valuable to fully assess the capabilities and limitations of this socially integrated navigation approach.
Conclusion
This paper presents a deep reinforcement learning method for enabling robots to navigate in a socially aware manner, considering the presence and behavior of nearby humans. By training the robot to balance efficient goal-reaching with socially appropriate actions, the researchers have developed a system that can generate navigation behaviors that are more natural and intuitive for human observers.
While the work is still limited to simulation, the findings suggest that this socially integrated approach could be a key enabler for robots to smoothly coexist and interact with people in real-world environments. Further development and real-world testing will be important to fully realize the potential of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Socially Integrated Navigation: A Social Acting Robot with Deep Reinforcement Learning
Daniel Flogel, Lars Fischer, Thomas Rudolf, Tobias Schurmann, Soren Hohmann
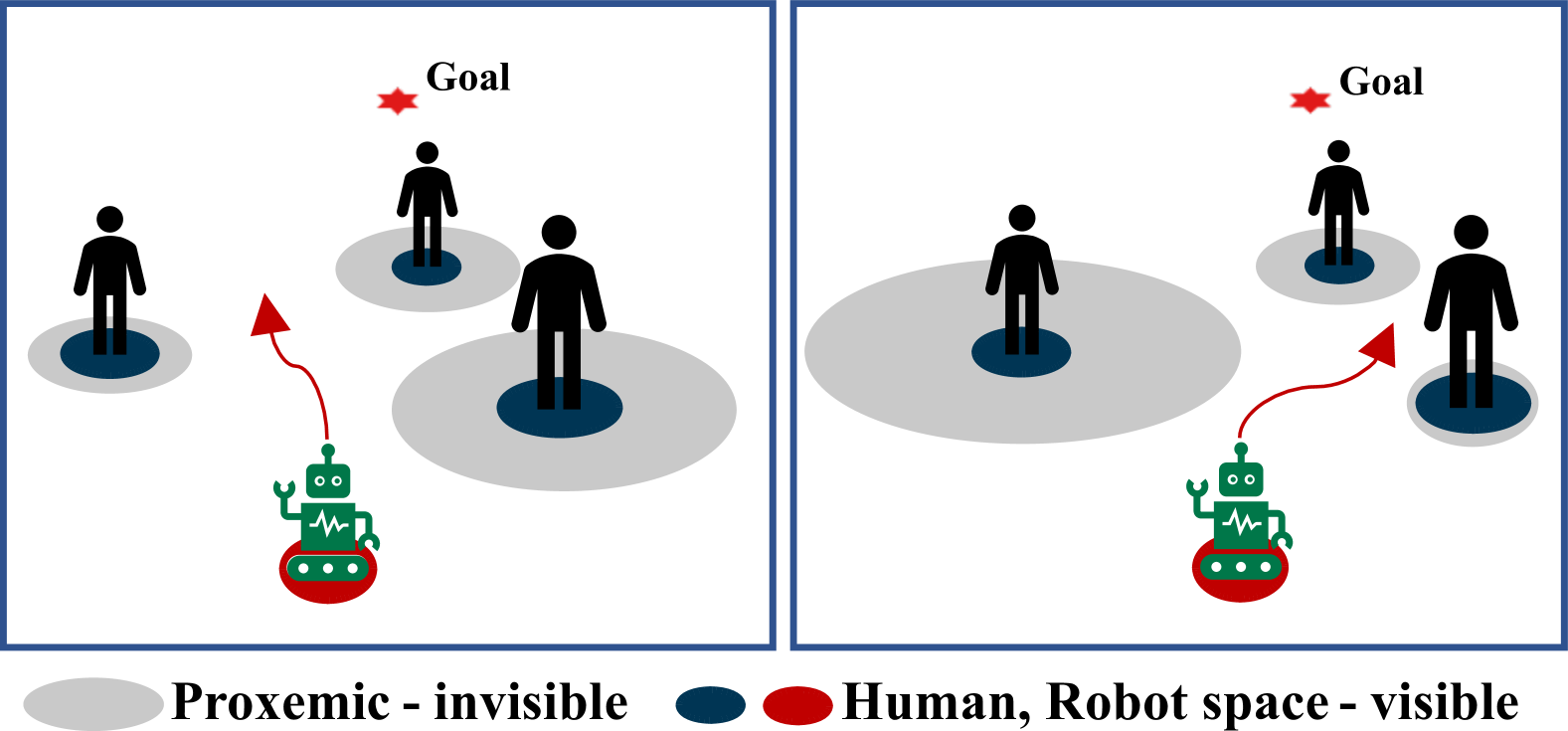
Mobile robots are being used on a large scale in various crowded situations and become part of our society. The socially acceptable navigation behavior of a mobile robot with individual human consideration is an essential requirement for scalable applications and human acceptance. Deep Reinforcement Learning (DRL) approaches are recently used to learn a robot's navigation policy and to model the complex interactions between robots and humans. We propose to divide existing DRL-based navigation approaches based on the robot's exhibited social behavior and distinguish between social collision avoidance with a lack of social behavior and socially aware approaches with explicit predefined social behavior. In addition, we propose a novel socially integrated navigation approach where the robot's social behavior is adaptive and emerges from the interaction with humans. The formulation of our approach is derived from a sociological definition, which states that social acting is oriented toward the acting of others. The DRL policy is trained in an environment where other agents interact socially integrated and reward the robot's behavior individually. The simulation results indicate that the proposed socially integrated navigation approach outperforms a socially aware approach in terms of ego navigation performance while significantly reducing the negative impact on all agents within the environment.
Read more7/29/2024
0
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
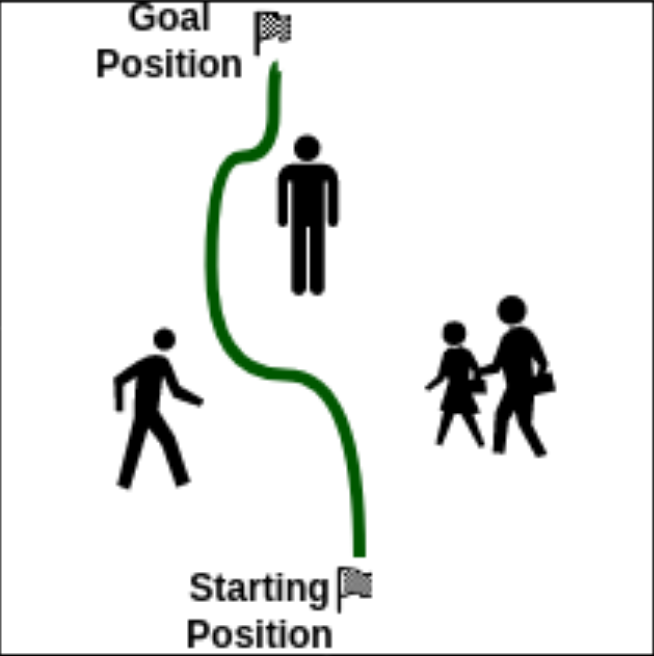
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
Read more5/3/2024

0
Multi-Robot Cooperative Socially-Aware Navigation Using Multi-Agent Reinforcement Learning
Weizheng Wang, Le Mao, Ruiqi Wang, Byung-Cheol Min
In public spaces shared with humans, ensuring multi-robot systems navigate without collisions while respecting social norms is challenging, particularly with limited communication. Although current robot social navigation techniques leverage advances in reinforcement learning and deep learning, they frequently overlook robot dynamics in simulations, leading to a simulation-to-reality gap. In this paper, we bridge this gap by presenting a new multi-robot social navigation environment crafted using Dec-POSMDP and multi-agent reinforcement learning. Furthermore, we introduce SAMARL: a novel benchmark for cooperative multi-robot social navigation. SAMARL employs a unique spatial-temporal transformer combined with multi-agent reinforcement learning. This approach effectively captures the complex interactions between robots and humans, thus promoting cooperative tendencies in multi-robot systems. Our extensive experiments reveal that SAMARL outperforms existing baseline and ablation models in our designed environment. Demo videos for this work can be found at: https://sites.google.com/view/samarl
Read more5/17/2024

0
Enhancing Socially-Aware Robot Navigation through Bidirectional Natural Language Conversation
Congcong Wen, Yifan Liu, Geeta Chandra Raju Bethala, Zheng Peng, Hui Lin, Yu-Shen Liu, Yi Fang
Robot navigation is an important research field with applications in various domains. However, traditional approaches often prioritize efficiency and obstacle avoidance, neglecting a nuanced understanding of human behavior or intent in shared spaces. With the rise of service robots, there's an increasing emphasis on endowing robots with the capability to navigate and interact in complex real-world environments. Socially aware navigation has recently become a key research area. However, existing work either predicts pedestrian movements or simply emits alert signals to pedestrians, falling short of facilitating genuine interactions between humans and robots. In this paper, we introduce the Hybrid Soft Actor-Critic with Large Language Model (HSAC-LLM), an innovative model designed for socially-aware navigation in robots. This model seamlessly integrates deep reinforcement learning with large language models, enabling it to predict both continuous and discrete actions for navigation. Notably, HSAC-LLM facilitates bidirectional interaction based on natural language with pedestrian models. When a potential collision with pedestrians is detected, the robot can initiate or respond to communications with pedestrians, obtaining and executing subsequent avoidance strategies. Experimental results in 2D simulation, the Gazebo environment, and the real-world environment demonstrate that HSAC-LLM not only efficiently enables interaction with humans but also exhibits superior performance in navigation and obstacle avoidance compared to state-of-the-art DRL algorithms. We believe this innovative paradigm opens up new avenues for effective and socially aware human-robot interactions in dynamic environments. Videos are available at https://hsacllm.github.io/.
Read more9/10/2024