Ensuring Safety at Intelligent Intersections: Temporal Logic Meets Reachability Analysis
2405.11300
0
0
Abstract
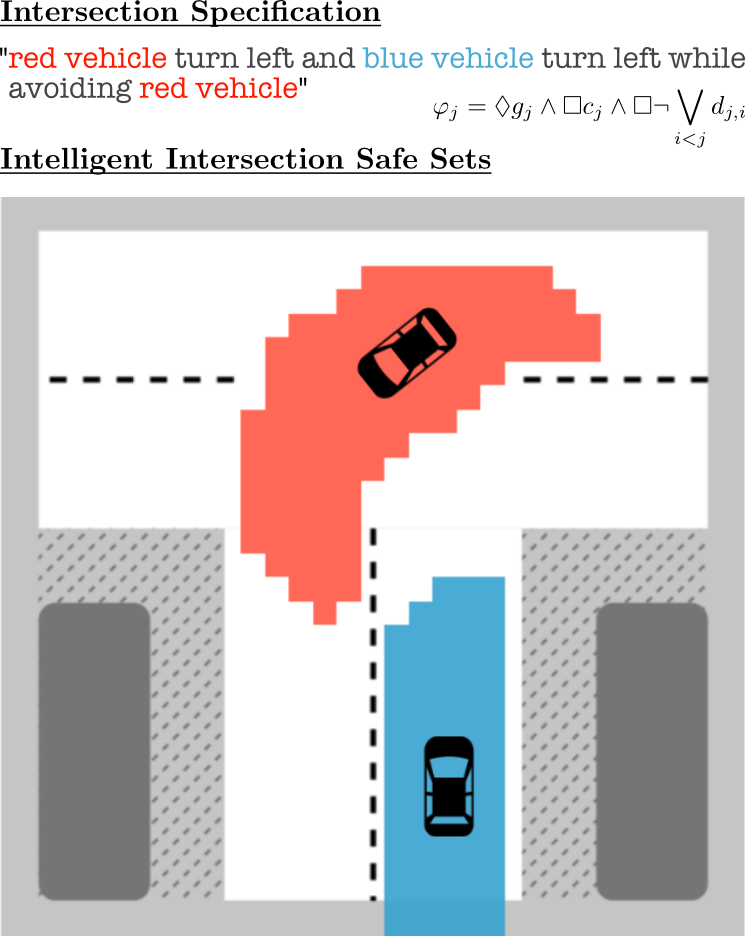
In this work, we propose an approach for ensuring the safety of vehicles passing through an intelligent intersection. There are many proposals for the design of intelligent intersections that introduce central decision-makers to intersections for enhancing the efficiency and safety of the vehicles. To guarantee the safety of such designs, we develop a safety framework for intersections based on temporal logic and reachability analysis. We start by specifying the required behavior for all the vehicles that need to pass through the intersection as linear temporal logic formula. Then, using temporal logic trees, we break down the linear temporal logic specification into a series of Hamilton-Jacobi reachability analyses in an automated fashion. By successfully constructing the temporal logic tree through reachability analysis, we verify the feasibility of the intersection specification. By taking this approach, we enable a safety framework that is able to automatically provide safety guarantees on new intersection behavior specifications. To evaluate our approach, we implement the framework on a simulated T-intersection, where we show that we can check and guarantee the safety of vehicles with potentially conflicting paths.
Create account to get full access
Overview
- This research paper focuses on ensuring safety at intelligent intersections by combining temporal logic and reachability analysis.
- The authors propose a framework to automatically synthesize control strategies that guarantee vehicles will safely navigate intelligent intersections.
- The approach involves formalizing safety requirements using temporal logic and then using reachability analysis to verify that the proposed control strategies satisfy these requirements.
Plain English Explanation
Intelligent intersections are a concept where cars, traffic signals, and other infrastructure work together to coordinate traffic flow and improve safety. However, ensuring that vehicles can safely navigate these complex intersections is a major challenge. This paper presents a new approach to address this problem.
The key idea is to use two powerful tools from computer science - temporal logic and reachability analysis. Temporal logic allows us to precisely specify the safety requirements, such as "the car must stop before entering the intersection." Reachability analysis then checks whether the proposed control strategies for the vehicles will actually satisfy these requirements, by simulating all possible scenarios.
By combining these techniques, the researchers can automatically synthesize control strategies that are proven to keep the vehicles safe as they navigate through the intelligent intersection. This helps address a critical challenge in deploying these advanced transportation systems in the real world.
Technical Explanation
The paper formulates the problem of ensuring safety at intelligent intersections as a control synthesis task. The authors first use temporal logic to formally specify the safety requirements, such as collision avoidance and traffic rule compliance. They then leverage reachability analysis to verify that the proposed control strategies satisfy these requirements.
The key steps in their approach are:
- Modeling the dynamics of the vehicles and the intersection infrastructure using a hybrid system framework.
- Formalizing the safety requirements using linear temporal logic.
- Employing reachability analysis to compute the set of states that the vehicles can reach under the proposed control strategies.
- Verifying that the reachable sets do not violate the safety specifications encoded in the temporal logic formula.
If the verification step is successful, the framework outputs a provably safe control strategy that can be deployed at the intelligent intersection. The authors demonstrate the effectiveness of their approach through simulation experiments.
Critical Analysis
The paper presents a rigorous and principled approach to addressing a crucial challenge in deploying intelligent transportation systems. By combining temporal logic and reachability analysis, the authors develop a framework that can automatically synthesize control strategies with formal safety guarantees.
One potential limitation is that the approach relies on accurate models of the vehicle dynamics and the intersection infrastructure. In practice, there may be uncertainties or discrepancies between the models and the real-world system. The authors acknowledge this and suggest incorporating robust reachability analysis to address this issue.
Additionally, the paper focuses on the verification of safety properties, but does not directly address the optimization of other performance metrics, such as traffic flow efficiency. Integrating these additional objectives into the control synthesis framework could be an interesting direction for future research.
Conclusion
This research paper presents a novel approach to ensuring safety at intelligent intersections by combining temporal logic and reachability analysis. The key contribution is the ability to automatically synthesize control strategies that are proven to satisfy formal safety requirements, helping to address a critical challenge in deploying advanced transportation systems.
The work demonstrates the power of integrating techniques from different fields, such as formal methods and control theory, to tackle complex real-world problems. The proposed framework lays the groundwork for developing safer and more reliable intelligent transportation systems, which could have significant implications for improving urban mobility and reducing the risk of accidents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Guaranteed Completion of Complex Tasks via Temporal Logic Trees and Hamilton-Jacobi Reachability
Frank J. Jiang, Kaj Munhoz Arfvidsson, Chong He, Mo Chen, Karl H. Johansson
0
0
In this paper, we present an approach for guaranteeing the completion of complex tasks with cyber-physical systems (CPS). Specifically, we leverage temporal logic trees constructed using Hamilton-Jacobi reachability analysis to (1) check for the existence of control policies that complete a specified task and (2) develop a computationally-efficient approach to synthesize the full set of control inputs the CPS can implement in real-time to ensure the task is completed. We show that, by checking the approximation directions of each state set in the temporal logic tree, we can check if the temporal logic tree suffers from the leaking corner issue, where the intersection of reachable sets yields an incorrect approximation. By ensuring a temporal logic tree has no leaking corners, we know the temporal logic tree correctly verifies the existence of control policies that satisfy the specified task. After confirming the existence of control policies, we show that we can leverage the value functions obtained through Hamilton-Jacobi reachability analysis to efficiently compute the set of control inputs the CPS can implement throughout the deployment time horizon to guarantee the completion of the specified task. Finally, we use a newly released Python toolbox to evaluate the presented approach on a simulated driving task.
4/15/2024
➖
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Farhad Nawaz, Shaoting Peng, Lars Lindemann, Nadia Figueroa, Nikolai Matni
0
0
Robots interacting with humans must be safe, reactive and adapt online to unforeseen environmental and task changes. Achieving these requirements concurrently is a challenge as interactive planners lack formal safety guarantees, while safe motion planners lack flexibility to adapt. To tackle this, we propose a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous Dynamical System (DS)-based motion plans. We formulate a reactive temporal logic formula that enables users to define task specifications through structured language, and propose a planning algorithm at the task level that generates a sequence of desired robot behaviors while being adaptive to environmental changes. At the motion level, we incorporate control Lyapunov functions and control barrier functions to compute stable and safe continuous motion plans for two types of robot behaviors: (i) complex, possibly periodic motions given by autonomous DS and (ii) time-critical tasks specified by Signal Temporal Logic~(STL). Our methodology is demonstrated on the Franka robot arm performing wiping tasks on a whiteboard and a mannequin that is compliant to human interactions and adaptive to environmental changes.
5/1/2024
🤷
Traffic Scenario Logic: A Spatial-Temporal Logic for Modeling and Reasoning of Urban Traffic Scenarios
Ruolin Wang, Yuejiao Xu, Jianmin Ji
0
0
Formal representations of traffic scenarios can be used to generate test cases for the safety verification of autonomous driving. However, most existing methods are limited in highway or highly simplified intersection scenarios due to the intricacy and diversity of traffic scenarios. In response, we propose Traffic Scenario Logic (TSL), which is a spatial-temporal logic designed for modeling and reasoning of urban pedestrian-free traffic scenarios. TSL provides a formal representation of the urban road network that can be derived from OpenDRIVE, i.e., the de facto industry standard of high-definition maps for autonomous driving, enabling the representation of a broad range of traffic scenarios. We implemented the reasoning of TSL using Telingo, i.e., a solver for temporal programs based on the Answer Set Programming, and tested it on different urban road layouts. Demonstrations show the effectiveness of TSL in test scenario generation and its potential value in areas like decision-making and control verification of autonomous driving.
5/24/2024
🏅
Provable Traffic Rule Compliance in Safe Reinforcement Learning on the Open Sea
Hanna Krasowski, Matthias Althoff
0
0
For safe operation, autonomous vehicles have to obey traffic rules that are set forth in legal documents formulated in natural language. Temporal logic is a suitable concept to formalize such traffic rules. Still, temporal logic rules often result in constraints that are hard to solve using optimization-based motion planners. Reinforcement learning (RL) is a promising method to find motion plans for autonomous vehicles. However, vanilla RL algorithms are based on random exploration and do not automatically comply with traffic rules. Our approach accomplishes guaranteed rule-compliance by integrating temporal logic specifications into RL. Specifically, we consider the application of vessels on the open sea, which must adhere to the Convention on the International Regulations for Preventing Collisions at Sea (COLREGS). To efficiently synthesize rule-compliant actions, we combine predicates based on set-based prediction with a statechart representing our formalized rules and their priorities. Action masking then restricts the RL agent to this set of verified rule-compliant actions. In numerical evaluations on critical maritime traffic situations, our agent always complies with the formalized legal rules and never collides while achieving a high goal-reaching rate during training and deployment. In contrast, vanilla and traffic rule-informed RL agents frequently violate traffic rules and collide even after training.
5/20/2024