Guaranteed Completion of Complex Tasks via Temporal Logic Trees and Hamilton-Jacobi Reachability
2404.08334
0
0

Abstract
In this paper, we present an approach for guaranteeing the completion of complex tasks with cyber-physical systems (CPS). Specifically, we leverage temporal logic trees constructed using Hamilton-Jacobi reachability analysis to (1) check for the existence of control policies that complete a specified task and (2) develop a computationally-efficient approach to synthesize the full set of control inputs the CPS can implement in real-time to ensure the task is completed. We show that, by checking the approximation directions of each state set in the temporal logic tree, we can check if the temporal logic tree suffers from the leaking corner issue, where the intersection of reachable sets yields an incorrect approximation. By ensuring a temporal logic tree has no leaking corners, we know the temporal logic tree correctly verifies the existence of control policies that satisfy the specified task. After confirming the existence of control policies, we show that we can leverage the value functions obtained through Hamilton-Jacobi reachability analysis to efficiently compute the set of control inputs the CPS can implement throughout the deployment time horizon to guarantee the completion of the specified task. Finally, we use a newly released Python toolbox to evaluate the presented approach on a simulated driving task.
Create account to get full access
Overview
- This paper presents a novel method for guaranteeing the completion of complex tasks for autonomous systems by combining temporal logic trees and Hamilton-Jacobi reachability analysis.
- The proposed approach allows for the systematic design of control policies that can handle a wide range of challenging tasks while providing formal guarantees of task completion.
- The method is demonstrated through several case studies, including a complex multi-agent navigation scenario and a robotic manipulation task.
Plain English Explanation
The researchers have developed a new technique that can help autonomous systems, like robots or self-driving cars, reliably complete complex tasks. The key innovation is the combination of two powerful tools: temporal logic trees and Hamilton-Jacobi reachability analysis.
Temporal logic trees allow the researchers to precisely define the desired task in a formal, logical way. This is important because it ensures the system has a clear understanding of what it needs to accomplish. The Hamilton-Jacobi analysis then helps the system determine the best way to navigate through the various steps required to complete the task, while ensuring it can actually reach all the necessary intermediate goals.
By bringing these two techniques together, the researchers have created a method that can handle very complex tasks, like navigating through a crowded environment or manipulating a series of objects. Crucially, this approach also provides a mathematical guarantee that the system will successfully complete the task, as long as certain assumptions are met. This is a significant advance over previous methods, which often struggled with more intricate scenarios.
The researchers demonstrate the effectiveness of their approach through several case studies, showing how it can be applied to challenging multi-agent navigation problems and robotic manipulation tasks. These examples illustrate the power and flexibility of the proposed technique, which could have important implications for the design of more capable and dependable autonomous systems.
Technical Explanation
The key contribution of this paper is the development of a unified framework that combines temporal logic trees and Hamilton-Jacobi reachability analysis to provide guaranteed task completion for autonomous systems.
The temporal logic trees allow the researchers to formally specify the desired task in a hierarchical, modular way. This provides a structured representation of the complex task, breaking it down into a set of interconnected sub-goals and temporal constraints. The Hamilton-Jacobi analysis is then used to compute the set of states from which the system can reach these sub-goals, ensuring the overall task can be completed.
By combining these two techniques, the researchers developed a systematic framework for designing control policies that can handle a wide range of challenging tasks, such as multi-agent navigation and robotic manipulation, while providing formal guarantees of task completion. The approach is demonstrated through several case studies, including a complex multi-agent navigation scenario and a robotic manipulation task involving a sequence of object interactions.
The key insights and technical contributions of the paper include:
- The formulation of a hierarchical task representation using temporal logic trees, which allows for the modular and structured specification of complex tasks.
- The integration of Hamilton-Jacobi reachability analysis to compute the set of states from which the system can reach the sub-goals defined in the temporal logic tree, ensuring overall task completion.
- The design of control policies that can navigate the system through the temporal logic tree while satisfying the Hamilton-Jacobi reachability constraints, providing formal guarantees of task completion.
- The demonstration of the proposed approach through several case studies, showcasing its ability to handle complex scenarios and providing insights into its practical implementation.
Critical Analysis
The researchers have presented a promising approach for guaranteeing the completion of complex tasks in autonomous systems, which addresses a significant challenge in the field. The combination of temporal logic trees and Hamilton-Jacobi reachability analysis is a novel and theoretically-grounded solution that provides a systematic way to design control policies with formal task completion guarantees.
One potential limitation of the approach is the reliance on a priori knowledge of the system dynamics and environmental constraints, which may not always be available or accurately known in real-world scenarios. The researchers acknowledge this and suggest that incorporating online adaptation or learning mechanisms could help address this issue. Additionally, the computational complexity of the Hamilton-Jacobi analysis may limit the scalability of the approach to large-scale or highly-dynamic systems.
Another area that could benefit from further exploration is the robustness of the control policies to unexpected disturbances or model uncertainties. While the Hamilton-Jacobi analysis provides formal guarantees under certain assumptions, it would be valuable to investigate how the approach can be extended to handle more realistic, uncertain environments.
Finally, the researchers could consider incorporating machine learning techniques to enhance the system's ability to adapt to novel or unanticipated scenarios, further expanding the range of tasks that can be reliably completed.
Overall, the proposed framework represents an important step forward in the development of dependable autonomous systems capable of handling complex tasks. The researchers have made a significant contribution to the field, and their work highlights the value of combining formal methods with advanced control techniques to push the boundaries of what is possible for autonomous systems.
Conclusion
This paper presents a novel approach for guaranteeing the completion of complex tasks in autonomous systems by integrating temporal logic trees and Hamilton-Jacobi reachability analysis. The key innovation is the systematic design of control policies that can navigate through the hierarchical task representation while satisfying the formal reachability constraints, providing mathematical guarantees of task completion.
The researchers demonstrate the effectiveness of their approach through several case studies, showcasing its ability to handle challenging multi-agent navigation and robotic manipulation scenarios. This work represents an important step forward in the development of more capable and dependable autonomous systems, with potential applications in a wide range of domains, from transportation and logistics to advanced manufacturing and healthcare robotics.
While the proposed framework has shown promising results, there are still opportunities for further research, such as addressing the reliance on accurate system models, enhancing the robustness to uncertainties, and exploring the integration of machine learning techniques. Nonetheless, this paper makes a valuable contribution to the field and lays the groundwork for future advancements in the reliable and verifiable control of complex autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
➖
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Farhad Nawaz, Shaoting Peng, Lars Lindemann, Nadia Figueroa, Nikolai Matni
0
0
Robots interacting with humans must be safe, reactive and adapt online to unforeseen environmental and task changes. Achieving these requirements concurrently is a challenge as interactive planners lack formal safety guarantees, while safe motion planners lack flexibility to adapt. To tackle this, we propose a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous Dynamical System (DS)-based motion plans. We formulate a reactive temporal logic formula that enables users to define task specifications through structured language, and propose a planning algorithm at the task level that generates a sequence of desired robot behaviors while being adaptive to environmental changes. At the motion level, we incorporate control Lyapunov functions and control barrier functions to compute stable and safe continuous motion plans for two types of robot behaviors: (i) complex, possibly periodic motions given by autonomous DS and (ii) time-critical tasks specified by Signal Temporal Logic~(STL). Our methodology is demonstrated on the Franka robot arm performing wiping tasks on a whiteboard and a mannequin that is compliant to human interactions and adaptive to environmental changes.
5/1/2024
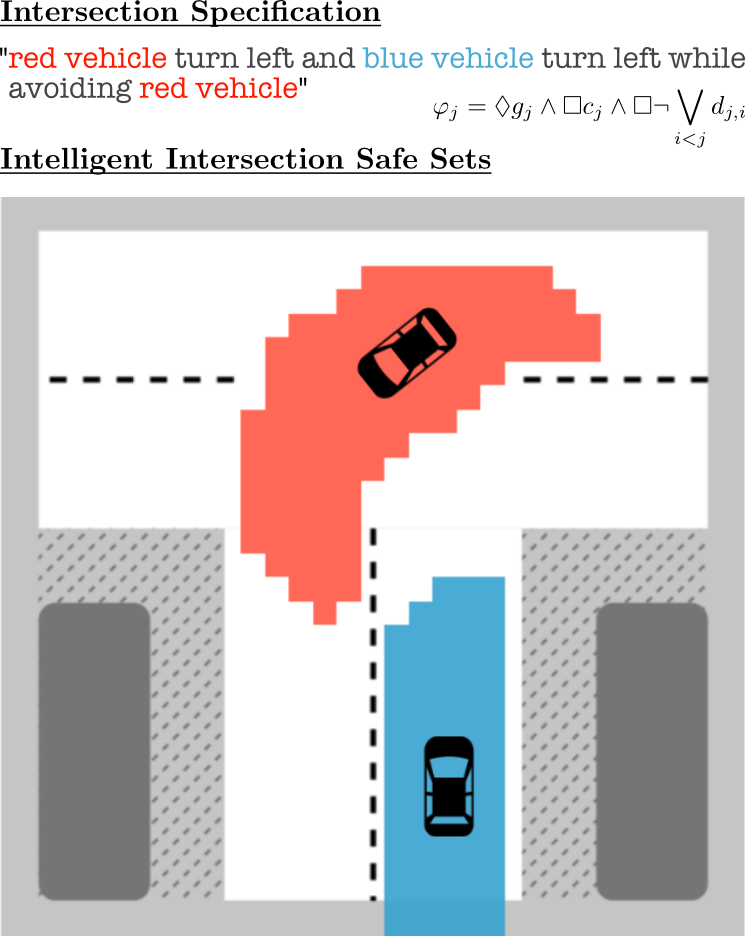
Ensuring Safety at Intelligent Intersections: Temporal Logic Meets Reachability Analysis
Kaj Munhoz Arfvidsson, Frank J. Jiang, Karl H. Johansson, Jonas M{aa}rtensson
0
0
In this work, we propose an approach for ensuring the safety of vehicles passing through an intelligent intersection. There are many proposals for the design of intelligent intersections that introduce central decision-makers to intersections for enhancing the efficiency and safety of the vehicles. To guarantee the safety of such designs, we develop a safety framework for intersections based on temporal logic and reachability analysis. We start by specifying the required behavior for all the vehicles that need to pass through the intersection as linear temporal logic formula. Then, using temporal logic trees, we break down the linear temporal logic specification into a series of Hamilton-Jacobi reachability analyses in an automated fashion. By successfully constructing the temporal logic tree through reachability analysis, we verify the feasibility of the intersection specification. By taking this approach, we enable a safety framework that is able to automatically provide safety guarantees on new intersection behavior specifications. To evaluate our approach, we implement the framework on a simulated T-intersection, where we show that we can check and guarantee the safety of vehicles with potentially conflicting paths.
5/21/2024

Continuous Execution of High-Level Collaborative Tasks for Heterogeneous Robot Teams
Amy Fang, Tenny Yin, Jiawei Lin, Hadas Kress-Gazit
0
0
We propose a control synthesis framework for a heterogeneous multi-robot system to satisfy collaborative tasks, where actions may take varying duration of time to complete. We encode tasks using the discrete logic LTL^psi, which uses the concept of bindings to interleave robot actions and express information about relationship between specific task requirements and robot assignments. We present a synthesis approach to automatically generate a teaming assignment and corresponding discrete behavior that is correct-by-construction for continuous execution, while also implementing synchronization policies to ensure collaborative portions of the task are satisfied. We demonstrate our approach on a physical multi-robot system.
6/27/2024
🔮
Decomposition-based Hierarchical Task Allocation and Planning for Multi-Robots under Hierarchical Temporal Logic Specifications
Xusheng Luo, Shaojun Xu, Ruixuan Liu, Changliu Liu
0
0
Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on a single formula for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. A recent development has been the hierarchical representation of LTL~cite{luo2024simultaneous} that contains multiple temporal logic specifications, providing a more interpretable framework. However, the proposed planning algorithm assumes the independence of robots within each specification, limiting their application to multi-robot coordination with complex temporal constraints. In this work, we formulated a decomposition-based hierarchical framework. At the high level, each specification is first decomposed into a set of atomic sub-tasks. We further infer the temporal relations among the sub-tasks of different specifications to construct a task network. Subsequently, a Mixed Integer Linear Program is used to assign sub-tasks to various robots. At the lower level, domain-specific controllers are employed to execute sub-tasks. Our approach was experimentally applied to domains of navigation and manipulation. The simulation demonstrated that our approach can find better solutions using less runtimes.
5/27/2024