Traffic Scenario Logic: A Spatial-Temporal Logic for Modeling and Reasoning of Urban Traffic Scenarios

0
🤷
Sign in to get full access
Overview
- This paper proposes a spatial-temporal logic called Traffic Scenario Logic (TSL) for modeling and reasoning about urban traffic scenarios without pedestrians.
- TSL can formally represent a wide range of traffic scenarios by deriving information from the OpenDRIVE industry standard for high-definition maps.
- The authors implemented TSL using Telingo, a solver for temporal programs based on Answer Set Programming, and tested it on different urban road layouts.
- The demonstrations show the effectiveness of TSL in generating test scenarios and its potential value for decision-making and control verification in autonomous driving.
Plain English Explanation
The paper describes a new way to formally represent and reason about urban traffic scenarios without pedestrians. This is important for testing the safety of autonomous driving systems, as real-world traffic situations can be highly complex and diverse.
The authors developed a spatial-temporal logic called Traffic Scenario Logic (TSL) that can model a wide range of traffic scenarios. TSL can derive information from the OpenDRIVE industry standard for high-definition maps, which allows it to represent various road networks and traffic patterns.
The researchers implemented TSL using a solver called Telingo, which can reason about temporal programs. They tested TSL on different urban road layouts and found it to be effective in generating test scenarios. This suggests that TSL could be valuable for verifying the decision-making and control of autonomous vehicles to ensure their safety.
Technical Explanation
The paper proposes a spatial-temporal logic called Traffic Scenario Logic (TSL) for modeling and reasoning about urban traffic scenarios without pedestrians. This is important for the safety verification of autonomous driving, as most existing methods are limited to highway or highly simplified intersection scenarios due to the complexity and diversity of real-world traffic situations.
TSL provides a formal representation of the urban road network that can be derived from the OpenDRIVE industry standard. This allows TSL to model a broad range of traffic scenarios, including various road layouts, lane structures, and traffic flows. The authors implemented the reasoning of TSL using Telingo, a solver for temporal programs based on Answer Set Programming.
The researchers tested TSL on different urban road layouts and demonstrated its effectiveness in generating test scenarios for the safety verification of autonomous driving. The results indicate that TSL has the potential to be valuable for decision-making and control verification in autonomous driving, as it can formally represent a wide range of traffic situations.
Critical Analysis
The paper presents a promising approach for formally modeling and reasoning about urban traffic scenarios, which is essential for the safety verification of autonomous driving systems. The use of the OpenDRIVE standard to derive the road network representation is a strength, as it allows TSL to model a broad range of traffic scenarios.
However, the paper does not address the potential limitations of the TSL approach, such as the scalability of the reasoning process or the handling of more complex traffic scenarios, such as those involving pedestrians or unpredictable driver behaviors. Additionally, the paper does not provide a comprehensive comparison of TSL with other existing methods for traffic scenario generation and verification.
Further research is needed to explore the robustness and practical applicability of TSL in real-world autonomous driving scenarios. Addressing these limitations and conducting more extensive evaluations could help strengthen the case for the adoption of TSL in the autonomous driving industry.
Conclusion
The Traffic Scenario Logic (TSL) proposed in this paper offers a promising approach for formally modeling and reasoning about urban traffic scenarios without pedestrians. By leveraging the OpenDRIVE industry standard, TSL can represent a wide range of traffic situations, enabling the generation of diverse test scenarios for the safety verification of autonomous driving systems.
The implementation of TSL using Telingo and the successful demonstrations on different urban road layouts suggest that the approach has the potential to be valuable for decision-making and control verification in autonomous driving. As the field of autonomous driving continues to evolve, tools like TSL that can formally capture the complexity of real-world traffic scenarios will become increasingly important for ensuring the safety and reliability of self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
0
Traffic Scenario Logic: A Spatial-Temporal Logic for Modeling and Reasoning of Urban Traffic Scenarios
Ruolin Wang, Yuejiao Xu, Jianmin Ji
Formal representations of traffic scenarios can be used to generate test cases for the safety verification of autonomous driving. However, most existing methods are limited to highway or highly simplified intersection scenarios due to the intricacy and diversity of traffic scenarios. In response, we propose Traffic Scenario Logic (TSL), which is a spatial-temporal logic designed for modeling and reasoning of urban pedestrian-free traffic scenarios. TSL provides a formal representation of the urban road network that can be derived from OpenDRIVE, i.e., the de facto industry standard of high-definition maps for autonomous driving, enabling the representation of a broad range of traffic scenarios without discretization approximations. We implemented the reasoning of TSL using Telingo, i.e., a solver for temporal programs based on the Answer Set Programming, and tested it on different urban road layouts. Demonstrations show the effectiveness of TSL in test scenario generation and its potential value in areas like decision-making and control verification of autonomous driving. The code for TSL reasoning is opened.
Read more9/24/2024

0
Traffic Scene Generation from Natural Language Description for Autonomous Vehicles with Large Language Model
Bo-Kai Ruan, Hao-Tang Tsui, Yung-Hui Li, Hong-Han Shuai
Text-to-scene generation, transforming textual descriptions into detailed scenes, typically relies on generating key scenarios along predetermined paths, constraining environmental diversity and limiting customization flexibility. To address these limitations, we propose a novel text-to-traffic scene framework that leverages a large language model to generate diverse traffic scenarios within the Carla simulator based on natural language descriptions. Users can define specific parameters such as weather conditions, vehicle types, and road signals, while our pipeline can autonomously select the starting point and scenario details, generating scenes from scratch without relying on predetermined locations or trajectories. Furthermore, our framework supports both critical and routine traffic scenarios, enhancing its applicability. Experimental results indicate that our approach promotes diverse agent planning and road selection, enhancing the training of autonomous agents in traffic environments. Notably, our methodology has achieved a 16% reduction in average collision rates. Our work is made publicly available at https://basiclab.github.io/TTSG.
Read more9/17/2024
🤿
0
Scene-Extrapolation: Generating Interactive Traffic Scenarios
Maximilian Zipfl, Barbara Schutt, J. Marius Zollner
Verifying highly automated driving functions can be challenging, requiring identifying relevant test scenarios. Scenario-based testing will likely play a significant role in verifying these systems, predominantly occurring within simulation. In our approach, we use traffic scenes as a starting point (seed-scene) to address the individuality of various highly automated driving functions and to avoid the problems associated with a predefined test traffic scenario. Different highly autonomous driving functions, or their distinct iterations, may display different behaviors under the same operating conditions. To make a generalizable statement about a seed-scene, we simulate possible outcomes based on various behavior profiles. We utilize our lightweight simulation environment and populate it with rule-based and machine learning behavior models for individual actors in the scenario. We analyze resulting scenarios using a variety of criticality metrics. The density distributions of the resulting criticality values enable us to make a profound statement about the significance of a particular scene, considering various eventualities.
Read more4/29/2024
0
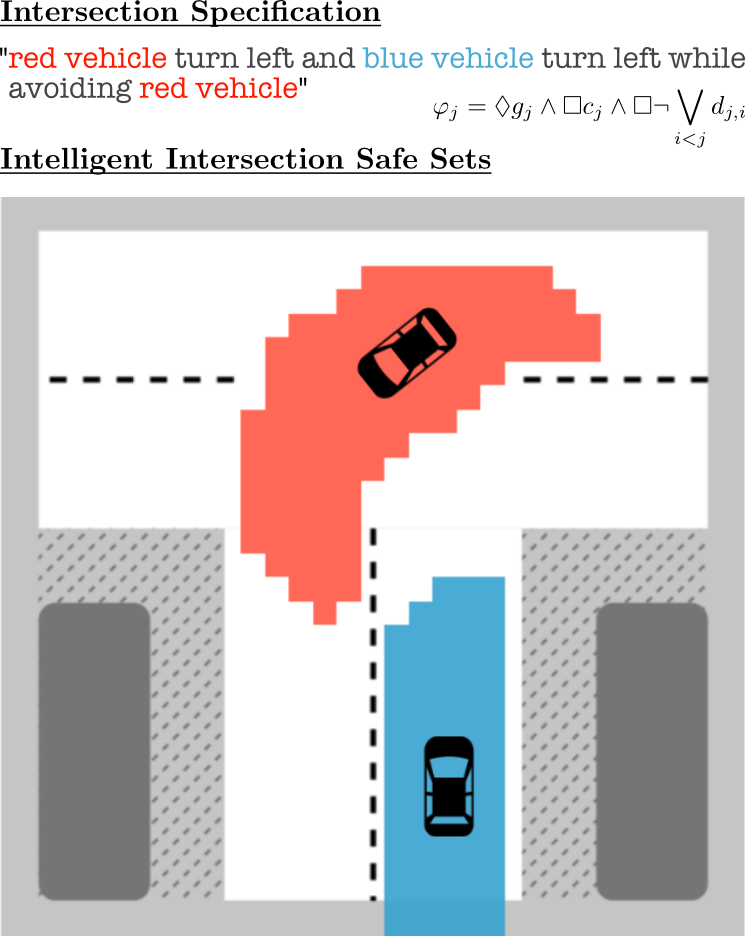
Ensuring Safety at Intelligent Intersections: Temporal Logic Meets Reachability Analysis
Kaj Munhoz Arfvidsson, Frank J. Jiang, Karl H. Johansson, Jonas M{aa}rtensson
In this work, we propose an approach for ensuring the safety of vehicles passing through an intelligent intersection. There are many proposals for the design of intelligent intersections that introduce central decision-makers to intersections for enhancing the efficiency and safety of the vehicles. To guarantee the safety of such designs, we develop a safety framework for intersections based on temporal logic and reachability analysis. We start by specifying the required behavior for all the vehicles that need to pass through the intersection as linear temporal logic formula. Then, using temporal logic trees, we break down the linear temporal logic specification into a series of Hamilton-Jacobi reachability analyses in an automated fashion. By successfully constructing the temporal logic tree through reachability analysis, we verify the feasibility of the intersection specification. By taking this approach, we enable a safety framework that is able to automatically provide safety guarantees on new intersection behavior specifications. To evaluate our approach, we implement the framework on a simulated T-intersection, where we show that we can check and guarantee the safety of vehicles with potentially conflicting paths.
Read more5/21/2024