EnvGen: Generating and Adapting Environments via LLMs for Training Embodied Agents

0
Sign in to get full access
Overview
- This paper introduces EnvGen, a framework for generating and adapting virtual environments using large language models (LLMs) to train embodied agents.
- EnvGen leverages the powerful language understanding and generation capabilities of LLMs to create diverse and customizable virtual worlds for AI agents to navigate and interact with.
- The framework allows for the generation of new environments as well as the adaptation of existing ones, enabling more flexible and efficient training of embodied agents.
Plain English Explanation
EnvGen is a system that uses powerful language models to create and modify virtual environments for training AI agents. Imagine you're training a robot to navigate a house - with EnvGen, you can easily generate a whole new house, or tweak the layout and objects in an existing one, to challenge the robot in different ways.
The key idea is that large language models, like the ones used for tasks like chatbots and text generation, can also be used to understand and generate the descriptions of virtual environments. This allows for a lot of flexibility and creativity in designing the training worlds for AI agents, compared to manually creating each environment from scratch.
For example, the language model could generate a description of a kitchen with certain appliances and furniture, and then the system can translate that into a fully rendered 3D environment for the agent to explore. Or the agent could be trained on a variety of environments generated in this way, exposing it to more diverse situations.
By making it easier to create and modify virtual training worlds, EnvGen aims to improve the effectiveness and efficiency of training embodied AI agents that need to navigate and interact with complex, dynamic environments.
Technical Explanation
EnvGen is a framework that leverages large language models (LLMs) to generate and adapt virtual environments for training embodied AI agents. The key components of EnvGen include:
-
Environment Generation: EnvGen uses LLMs to generate natural language descriptions of virtual environments, which are then translated into fully rendered 3D worlds. This allows for the creation of a wide variety of environments, going beyond manually curated ones.
-
Environment Adaptation: EnvGen also supports the adaptation of existing environments by using LLMs to modify the language descriptions, enabling the introduction of new challenges and variations for the agents to overcome.
-
Environment-Agent Interaction: The generated or adapted environments are integrated with the training of embodied agents, allowing the agents to navigate, perceive, and interact with the virtual worlds.
The researchers demonstrate the capabilities of EnvGen through several experiments, including the generation of diverse home environments and the adaptation of existing game levels. The results show that EnvGen can effectively create engaging and challenging virtual worlds for training embodied AI agents, paving the way for more flexible and scalable approaches to this domain.
Critical Analysis
The EnvGen framework represents an intriguing and promising approach to generating and adapting virtual environments for training embodied AI agents. By leveraging the power of large language models, the system can potentially create a much richer and more diverse set of training environments compared to manual approaches.
However, the paper does not extensively address the potential limitations and challenges of this approach. For instance, the quality and coherence of the generated environments may be dependent on the capabilities of the underlying language model, which could be susceptible to biases or inconsistencies. Additionally, the translation from language descriptions to fully rendered 3D environments may introduce its own set of challenges and artifacts.
Further research is needed to assess the robustness and generalizability of EnvGen, as well as its ability to generate environments that effectively transfer to the real-world challenges faced by embodied AI agents. Careful evaluation of the training performance and generalization of agents across diverse EnvGen-generated environments would be a valuable next step.
Conclusion
The EnvGen framework represents an innovative approach to generating and adapting virtual environments for training embodied AI agents. By harnessing the power of large language models, the system can create a diverse range of environments and introduce new challenges and variations to push the boundaries of agent training.
While the initial results are promising, further research is needed to fully understand the capabilities and limitations of this approach. Nonetheless, EnvGen demonstrates the potential for language models to play a transformative role in the development of more capable and adaptable embodied AI agents, with far-reaching implications for robotics, virtual assistants, and other real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
EnvGen: Generating and Adapting Environments via LLMs for Training Embodied Agents
Abhay Zala, Jaemin Cho, Han Lin, Jaehong Yoon, Mohit Bansal
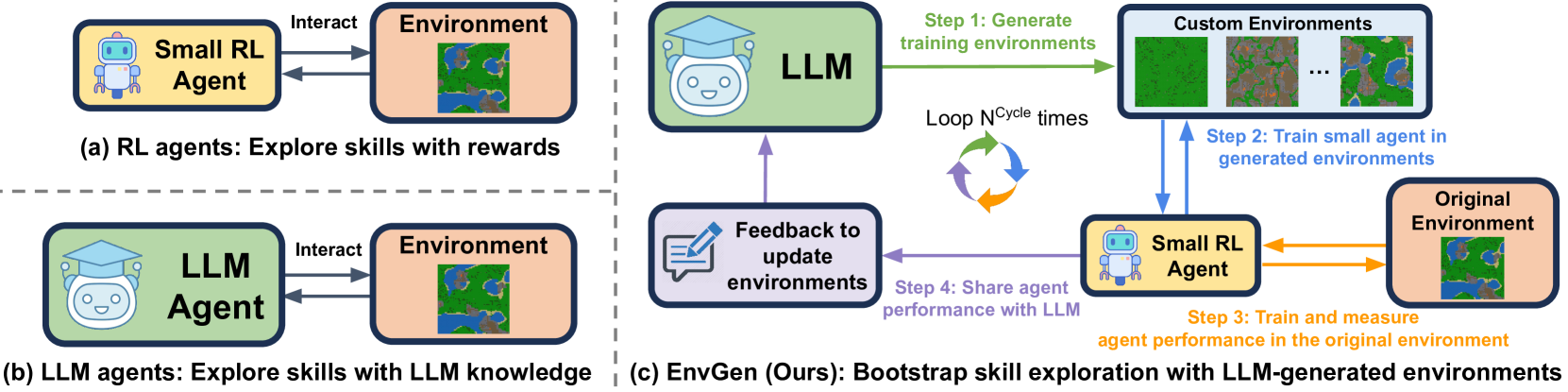
Recent SOTA approaches for embodied learning via interaction directly employ large language models (LLMs) as agents to determine the next steps in an environment. Due to their world knowledge and reasoning capabilities, LLM agents achieve stronger performance than previous smaller agents based on reinforcement learning (RL); however, frequently calling LLMs is slow and expensive. Instead of directly employing LLMs as agents, can we use LLMs' reasoning capabilities to adaptively create training environments to help smaller RL agents learn useful skills that they are weak at? We propose EnvGen, a novel framework to address this question. We first prompt an LLM to generate training environments by giving it the task description and simulator objectives that the agents should learn and then asking it to generate a set of environment configurations (e.g., different terrains, items initially given to agents, etc.). Next, we train a small RL agent in a mixture of the original and LLM-generated environments. Then, we enable the LLM to continuously adapt the generated environments to progressively improve the skills that the agent is weak at, by providing feedback to the LLM in the form of the agent's performance. We demonstrate the usefulness of EnvGen with comprehensive experiments in Crafter and Heist environments. We find that a small RL agent trained with EnvGen can outperform SOTA methods, including a GPT-4 agent, and learns long-horizon tasks significantly faster. We also show that using an LLM to adapt environments dynamically outperforms curriculum learning approaches and how the environments are adapted to help improve RL agents' weaker skills over time. Additionally, EnvGen is substantially more efficient as it only uses a small number of LLM calls (e.g., 4 in total), whereas LLM agents require thousands of calls. Lastly, we present detailed ablation studies for EnvGen design choices.
Read more7/15/2024
💬
0
AgentGen: Enhancing Planning Abilities for Large Language Model based Agent via Environment and Task Generation
Mengkang Hu, Pu Zhao, Can Xu, Qingfeng Sun, Jianguang Lou, Qingwei Lin, Ping Luo, Saravan Rajmohan, Dongmei Zhang
Large Language Model (LLM) based agents have garnered significant attention and are becoming increasingly popular. Furthermore, planning ability is a crucial component of an LLM-based agent, involving interaction with the environment and executing actions to complete a planning task, which generally entails achieving a desired goal from an initial state. This paper investigates enhancing the planning abilities of LLMs through instruction tuning, referred to as agent training. Recent studies have demonstrated that utilizing expert-level trajectory for instruction-tuning LLMs effectively enhances their planning capabilities. However, existing work primarily focuses on synthesizing trajectories from manually designed planning tasks and environments. The labor-intensive nature of creating these environments and tasks impedes the generation of sufficiently varied and extensive trajectories. To address this limitation, this paper explores the automated synthesis of diverse environments and a gradual range of planning tasks, from easy to difficult. We introduce a framework, AgentGen, that leverages LLMs first to generate environments and subsequently generate planning tasks conditioned on these environments. Specifically, to improve environmental diversity, we propose using an inspiration corpus composed of various domain-specific text segments as the context for synthesizing environments. Moreover, to increase the difficulty diversity of generated planning tasks, we propose a bidirectional evolution method, Bi-Evol, that evolves planning tasks from easier and harder directions to synthesize a task set with a smoother difficulty curve. The evaluation results derived from AgentBoard show that AgentGen greatly improves LLMs' planning ability, e.g., the AgentGen instruction-tuned Llama-3 8B surpasses GPT-3.5 in overall performance. Moreover, in certain tasks, it even outperforms GPT-4.
Read more8/2/2024

0
AgentGym: Evolving Large Language Model-based Agents across Diverse Environments
Zhiheng Xi, Yiwen Ding, Wenxiang Chen, Boyang Hong, Honglin Guo, Junzhe Wang, Dingwen Yang, Chenyang Liao, Xin Guo, Wei He, Songyang Gao, Lu Chen, Rui Zheng, Yicheng Zou, Tao Gui, Qi Zhang, Xipeng Qiu, Xuanjing Huang, Zuxuan Wu, Yu-Gang Jiang
Building generalist agents that can handle diverse tasks and evolve themselves across different environments is a long-term goal in the AI community. Large language models (LLMs) are considered a promising foundation to build such agents due to their generalized capabilities. Current approaches either have LLM-based agents imitate expert-provided trajectories step-by-step, requiring human supervision, which is hard to scale and limits environmental exploration; or they let agents explore and learn in isolated environments, resulting in specialist agents with limited generalization. In this paper, we take the first step towards building generally-capable LLM-based agents with self-evolution ability. We identify a trinity of ingredients: 1) diverse environments for agent exploration and learning, 2) a trajectory set to equip agents with basic capabilities and prior knowledge, and 3) an effective and scalable evolution method. We propose AgentGym, a new framework featuring a variety of environments and tasks for broad, real-time, uni-format, and concurrent agent exploration. AgentGym also includes a database with expanded instructions, a benchmark suite, and high-quality trajectories across environments. Next, we propose a novel method, AgentEvol, to investigate the potential of agent self-evolution beyond previously seen data across tasks and environments. Experimental results show that the evolved agents can achieve results comparable to SOTA models. We release the AgentGym suite, including the platform, dataset, benchmark, checkpoints, and algorithm implementations. The AgentGym suite is available on https://github.com/WooooDyy/AgentGym.
Read more6/7/2024

0
LLM-POET: Evolving Complex Environments using Large Language Models
Fuma Aki, Riku Ikeda, Takumi Saito, Ciaran Regan, Mizuki Oka
Creating systems capable of generating virtually infinite variations of complex and novel behaviour without predetermined goals or limits is a major challenge in the field of AI. This challenge has been addressed through the development of several open-ended algorithms that can continuously generate new and diverse behaviours, such as the POET and Enhanced-POET algorithms for co-evolving environments and agent behaviour. One of the challenges with existing methods however, is that they struggle to continuously generate complex environments. In this work, we propose LLM-POET, a modification of the POET algorithm where the environment is both created and mutated using a Large Language Model (LLM). By fine-tuning a LLM with text representations of Evolution Gym environments and captions that describe the environment, we were able to generate complex and diverse environments using natural language. We found that not only could the LLM produce a diverse range of environments, but compared to the CPPNs used in Enhanced-POET for environment generation, the LLM allowed for a 34% increase in the performance gain of co-evolution. This increased performance suggests that the agents were able to learn a more diverse set of skills by training on more complex environments.
Read more6/10/2024