Error Bounds For Gaussian Process Regression Under Bounded Support Noise With Applications To Safety Certification

0
Sign in to get full access
Overview
- The paper discusses error bounds for Gaussian process regression under bounded support noise, with applications to safety certification.
- It provides a theoretical framework for quantifying the uncertainty in Gaussian process regression when the noise distribution has bounded support.
- The results are applied to the problem of safety certification, where the goal is to ensure that a system's output remains within a safe range with high probability.
Plain English Explanation
Gaussian processes are a powerful tool for modeling and predicting data, but they can be affected by noise in the observations. This paper looks at a specific type of noise called "bounded support noise," where the noise is limited to a certain range of values.
The researchers developed a set of mathematical tools to quantify the uncertainty in Gaussian process regression when dealing with this type of noise. This allows them to provide tighter error bounds on the predictions made by the Gaussian process model.
The key application they focus on is safety certification. In many systems, it's important to ensure that the output stays within a "safe" range, even in the presence of uncertainty. By using the error bounds developed in the paper, the researchers show how to certify the safety of a system with high confidence, even when the data is noisy.
Technical Explanation
The paper provides a theoretical analysis of Gaussian process regression under bounded support noise. Specifically, they derive error bounds on the mean and variance of the Gaussian process predictions, accounting for the fact that the noise distribution is limited to a bounded range.
The key insights are:
- Bounded Noise Assumption: The researchers assume the noise has a bounded support, meaning it is limited to a finite interval. This is a reasonable assumption in many practical applications.
- Tighter Error Bounds: By exploiting the bounded noise property, the authors are able to derive tighter error bounds on the Gaussian process predictions compared to the standard results.
- Safety Certification: The error bounds are then applied to the problem of safety certification, where the goal is to ensure that the system's output remains within a safe range with high probability. The authors develop a framework to certify the safety of a system based on the Gaussian process model and the derived error bounds.
Critical Analysis
The paper makes a valuable contribution by providing a theoretical framework for handling bounded support noise in Gaussian process regression. This is an important practical consideration, as many real-world systems are subject to noise with limited ranges.
However, the analysis assumes that the noise distribution is known a priori, which may not always be the case in practice. Additionally, the paper does not consider the impact of model misspecification, where the Gaussian process model may not perfectly capture the underlying function.
Further research could explore relaxing these assumptions and developing more robust safety certification methods that can handle model uncertainty in addition to noise uncertainty.
Conclusion
This paper presents a rigorous theoretical analysis of Gaussian process regression under bounded support noise, and demonstrates how the resulting error bounds can be used for safety certification. The findings have important implications for the deployment of Gaussian process models in safety-critical applications, where quantifying and bounding uncertainty is of paramount importance. The insights and techniques developed in this work can be extended to a broader class of machine learning models and decision-making problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Error Bounds For Gaussian Process Regression Under Bounded Support Noise With Applications To Safety Certification
Robert Reed, Luca Laurenti, Morteza Lahijanian
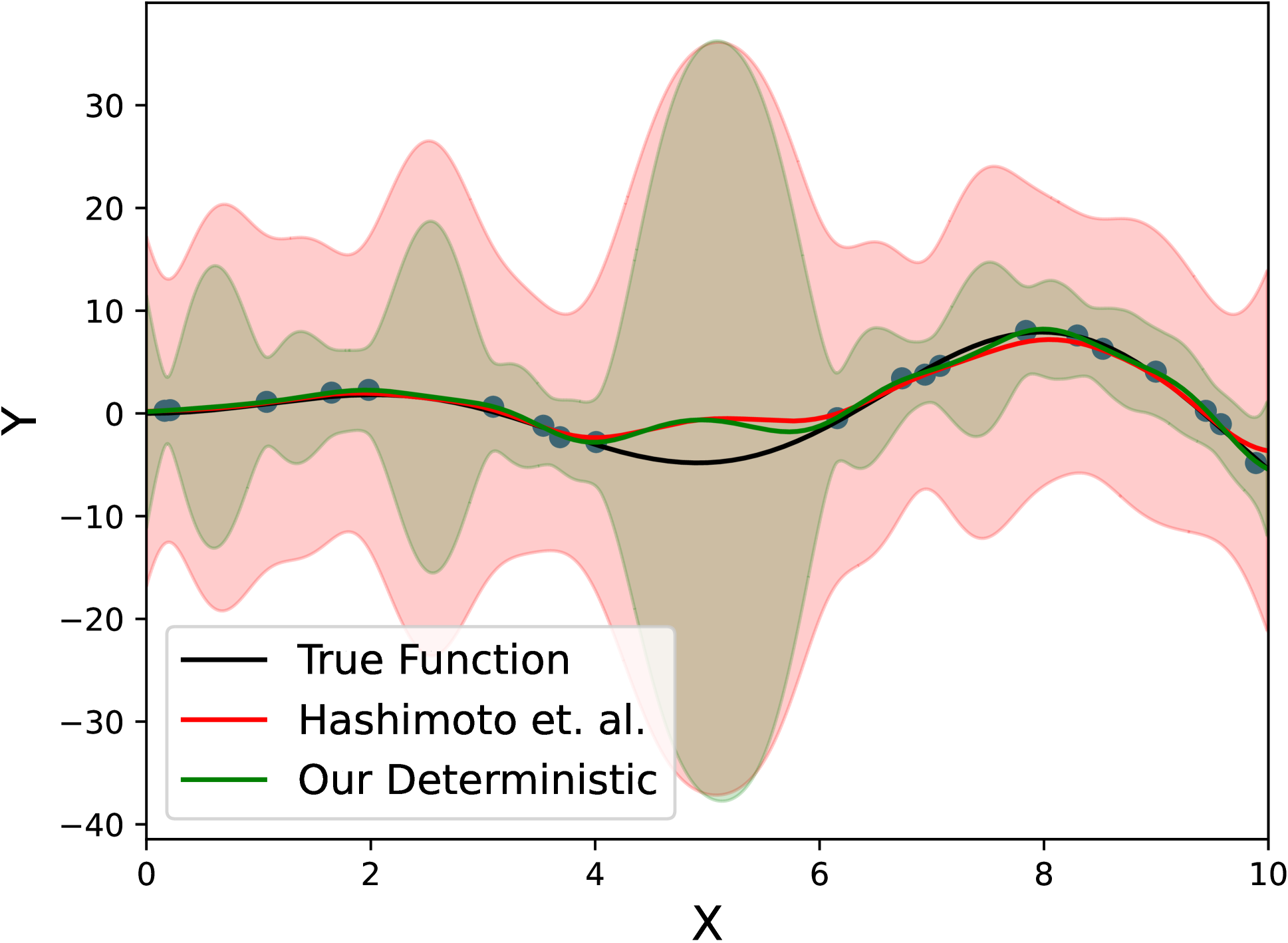
Gaussian Process Regression (GPR) is a powerful and elegant method for learning complex functions from noisy data with a wide range of applications, including in safety-critical domains. Such applications have two key features: (i) they require rigorous error quantification, and (ii) the noise is often bounded and non-Gaussian due to, e.g., physical constraints. While error bounds for applying GPR in the presence of non-Gaussian noise exist, they tend to be overly restrictive and conservative in practice. In this paper, we provide novel error bounds for GPR under bounded support noise. Specifically, by relying on concentration inequalities and assuming that the latent function has low complexity in the reproducing kernel Hilbert space (RKHS) corresponding to the GP kernel, we derive both probabilistic and deterministic bounds on the error of the GPR. We show that these errors are substantially tighter than existing state-of-the-art bounds and are particularly well-suited for GPR with neural network kernels, i.e., Deep Kernel Learning (DKL). Furthermore, motivated by applications in safety-critical domains, we illustrate how these bounds can be combined with stochastic barrier functions to successfully quantify the safety probability of an unknown dynamical system from finite data. We validate the efficacy of our approach through several benchmarks and comparisons against existing bounds. The results show that our bounds are consistently smaller, and that DKLs can produce error bounds tighter than sample noise, significantly improving the safety probability of control systems.
Read more8/20/2024
🔮
0
Guaranteed Coverage Prediction Intervals with Gaussian Process Regression
Harris Papadopoulos
Gaussian Process Regression (GPR) is a popular regression method, which unlike most Machine Learning techniques, provides estimates of uncertainty for its predictions. These uncertainty estimates however, are based on the assumption that the model is well-specified, an assumption that is violated in most practical applications, since the required knowledge is rarely available. As a result, the produced uncertainty estimates can become very misleading; for example the prediction intervals (PIs) produced for the 95% confidence level may cover much less than 95% of the true labels. To address this issue, this paper introduces an extension of GPR based on a Machine Learning framework called, Conformal Prediction (CP). This extension guarantees the production of PIs with the required coverage even when the model is completely misspecified. The proposed approach combines the advantages of GPR with the valid coverage guarantee of CP, while the performed experimental results demonstrate its superiority over existing methods.
Read more8/29/2024
↗️
0
Formal Verification of Unknown Dynamical Systems via Gaussian Process Regression
John Skovbekk, Luca Laurenti, Eric Frew, Morteza Lahijanian
Leveraging autonomous systems in safety-critical scenarios requires verifying their behaviors in the presence of uncertainties and black-box components that influence the system dynamics. In this work, we develop a framework for verifying discrete-time dynamical systems with unmodelled dynamics and noisy measurements against temporal logic specifications from an input-output dataset. The verification framework employs Gaussian process (GP) regression to learn the unknown dynamics from the dataset and abstracts the continuous-space system as a finite-state, uncertain Markov decision process (MDP). This abstraction relies on space discretization and transition probability intervals that capture the uncertainty due to the error in GP regression by using reproducible kernel Hilbert space analysis as well as the uncertainty induced by discretization. The framework utilizes existing model checking tools for verification of the uncertain MDP abstraction against a given temporal logic specification. We establish the correctness of extending the verification results on the abstraction created from noisy measurements to the underlying system. We show that the computational complexity of the framework is polynomial in the size of the dataset and discrete abstraction. The complexity analysis illustrates a trade-off between the quality of the verification results and the computational burden to handle larger datasets and finer abstractions. Finally, we demonstrate the efficacy of our learning and verification framework on several case studies with linear, nonlinear, and switched dynamical systems.
Read more7/17/2024
↗️
0
Efficient Two-Stage Gaussian Process Regression Via Automatic Kernel Search and Subsampling
Shifan Zhao (Carl), Jiaying Lu (Carl), Ji Yang (Carl), Edmond Chow, Yuanzhe Xi
Gaussian Process Regression (GPR) is widely used in statistics and machine learning for prediction tasks requiring uncertainty measures. Its efficacy depends on the appropriate specification of the mean function, covariance kernel function, and associated hyperparameters. Severe misspecifications can lead to inaccurate results and problematic consequences, especially in safety-critical applications. However, a systematic approach to handle these misspecifications is lacking in the literature. In this work, we propose a general framework to address these issues. Firstly, we introduce a flexible two-stage GPR framework that separates mean prediction and uncertainty quantification (UQ) to prevent mean misspecification, which can introduce bias into the model. Secondly, kernel function misspecification is addressed through a novel automatic kernel search algorithm, supported by theoretical analysis, that selects the optimal kernel from a candidate set. Additionally, we propose a subsampling-based warm-start strategy for hyperparameter initialization to improve efficiency and avoid hyperparameter misspecification. With much lower computational cost, our subsampling-based strategy can yield competitive or better performance than training exclusively on the full dataset. Combining all these components, we recommend two GPR methods-exact and scalable-designed to match available computational resources and specific UQ requirements. Extensive evaluation on real-world datasets, including UCI benchmarks and a safety-critical medical case study, demonstrates the robustness and precision of our methods.
Read more5/24/2024