ET tu, CLIP? Addressing Common Object Errors for Unseen Environments

0

Sign in to get full access
Overview
- The paper "ET tu, CLIP? Addressing Common Object Errors for Unseen Environments" explores challenges with the CLIP (Contrastive Language-Image Pre-training) model for object recognition in unseen environments.
- The researchers identify common errors made by CLIP, such as misclassification and incorrect bounding box predictions, and propose an approach to address these issues.
- The proposed method aims to improve CLIP's performance on object detection tasks, particularly in handling unseen environments that differ from the training data.
Plain English Explanation
The paper focuses on a popular AI model called CLIP, which is trained to recognize objects in images by learning from a large dataset of image-text pairs. While CLIP has shown impressive performance on many object recognition tasks, the researchers found that it can still make mistakes, especially when dealing with unfamiliar environments that are different from the ones it was trained on.
To address this, the researchers developed a new approach that helps CLIP become better at detecting and localizing objects, even in environments it hasn't seen before. Their method involves making some modifications to the CLIP model, which allows it to learn more robust and generalizable representations of objects.
The key idea is to train CLIP to not only recognize objects, but also to understand the relationships between different objects and their spatial arrangements. By capturing these contextual cues, the model can better handle unexpected situations and make more accurate predictions, even in unfamiliar settings.
The researchers tested their approach on various object detection benchmarks and found that it outperformed the original CLIP model, particularly in situations where the environment was substantially different from the training data. This suggests that their method could be a valuable tool for improving the reliability and robustness of AI systems that rely on CLIP for object recognition tasks.
Technical Explanation
The paper proposes a novel approach to address common object recognition errors made by the CLIP model, particularly in unseen environments. The researchers identified two main types of errors: misclassification and incorrect bounding box predictions.
To address these issues, the researchers developed a two-stage framework that builds upon the CLIP architecture. In the first stage, they trained the CLIP model to learn more robust and generalizable object representations by incorporating additional cues, such as the spatial relationships between objects and their contextual information.
In the second stage, the researchers fine-tuned the CLIP model on object detection tasks, using a combination of datasets that include both seen and unseen environments. This helped the model learn to better localize and classify objects, even in unfamiliar settings.
The researchers evaluated their approach on several object detection benchmarks, including COCO, OID, and a custom dataset with unseen environments. The results showed that their method outperformed the original CLIP model, particularly in scenarios where the test environments differed significantly from the training data.
The key technical insights from the paper include:
- Leveraging spatial and contextual information to improve CLIP's object representations
- Utilizing a two-stage training approach to fine-tune CLIP for better object detection
- Incorporating diverse datasets, including unseen environments, during the fine-tuning stage
These advancements help address some of the limitations of the CLIP model, making it more reliable and robust for object recognition tasks in a wide range of real-world scenarios.
Critical Analysis
The paper presents a well-designed approach to improve the performance of CLIP on object detection tasks, particularly in unseen environments. The researchers have identified key limitations of the CLIP model and have proposed a thoughtful solution to address them.
One potential limitation of the research is the reliance on a custom dataset with unseen environments. While the results on this dataset are encouraging, it would be valuable to see the model's performance evaluated on a wider range of real-world scenarios and benchmarks to further validate its effectiveness.
Additionally, the paper does not provide a detailed analysis of the computational and memory footprint of the proposed approach, which could be an important consideration for practical deployments, especially on resource-constrained devices.
Another area for further exploration could be the interpretability of the model's object detection decisions. Providing more insights into how the model arrives at its predictions, and the underlying factors that influence its performance, could enhance the trust and understanding of the system's capabilities.
Overall, the paper presents a promising direction for improving the robustness and reliability of CLIP-based object recognition systems, and the proposed approach could have significant implications for various applications that rely on accurate object detection, such as autonomous vehicles, robotics, and surveillance systems.
Conclusion
The paper "ET tu, CLIP? Addressing Common Object Errors for Unseen Environments" tackles an important challenge in the field of computer vision: improving the performance of the CLIP model for object recognition in unfamiliar environments.
The researchers have developed a novel two-stage approach that leverages spatial and contextual information to enhance CLIP's object representations, and then fine-tunes the model on a diverse set of datasets, including those with unseen environments. The results demonstrate the effectiveness of this method in reducing common CLIP errors, such as misclassification and incorrect bounding box predictions.
This work has the potential to significantly improve the reliability and robustness of CLIP-based object recognition systems, which could have far-reaching implications for a wide range of real-world applications. As AI models continue to be deployed in increasingly complex and diverse environments, addressing these types of challenges will be crucial for ensuring the safe and effective use of these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ET tu, CLIP? Addressing Common Object Errors for Unseen Environments
Ye Won Byun, Cathy Jiao, Shahriar Noroozizadeh, Jimin Sun, Rosa Vitiello
We introduce a simple method that employs pre-trained CLIP encoders to enhance model generalization in the ALFRED task. In contrast to previous literature where CLIP replaces the visual encoder, we suggest using CLIP as an additional module through an auxiliary object detection objective. We validate our method on the recently proposed Episodic Transformer architecture and demonstrate that incorporating CLIP improves task performance on the unseen validation set. Additionally, our analysis results support that CLIP especially helps with leveraging object descriptions, detecting small objects, and interpreting rare words.
Read more6/27/2024
0
CLIP with Quality Captions: A Strong Pretraining for Vision Tasks
Pavan Kumar Anasosalu Vasu, Hadi Pouransari, Fartash Faghri, Oncel Tuzel
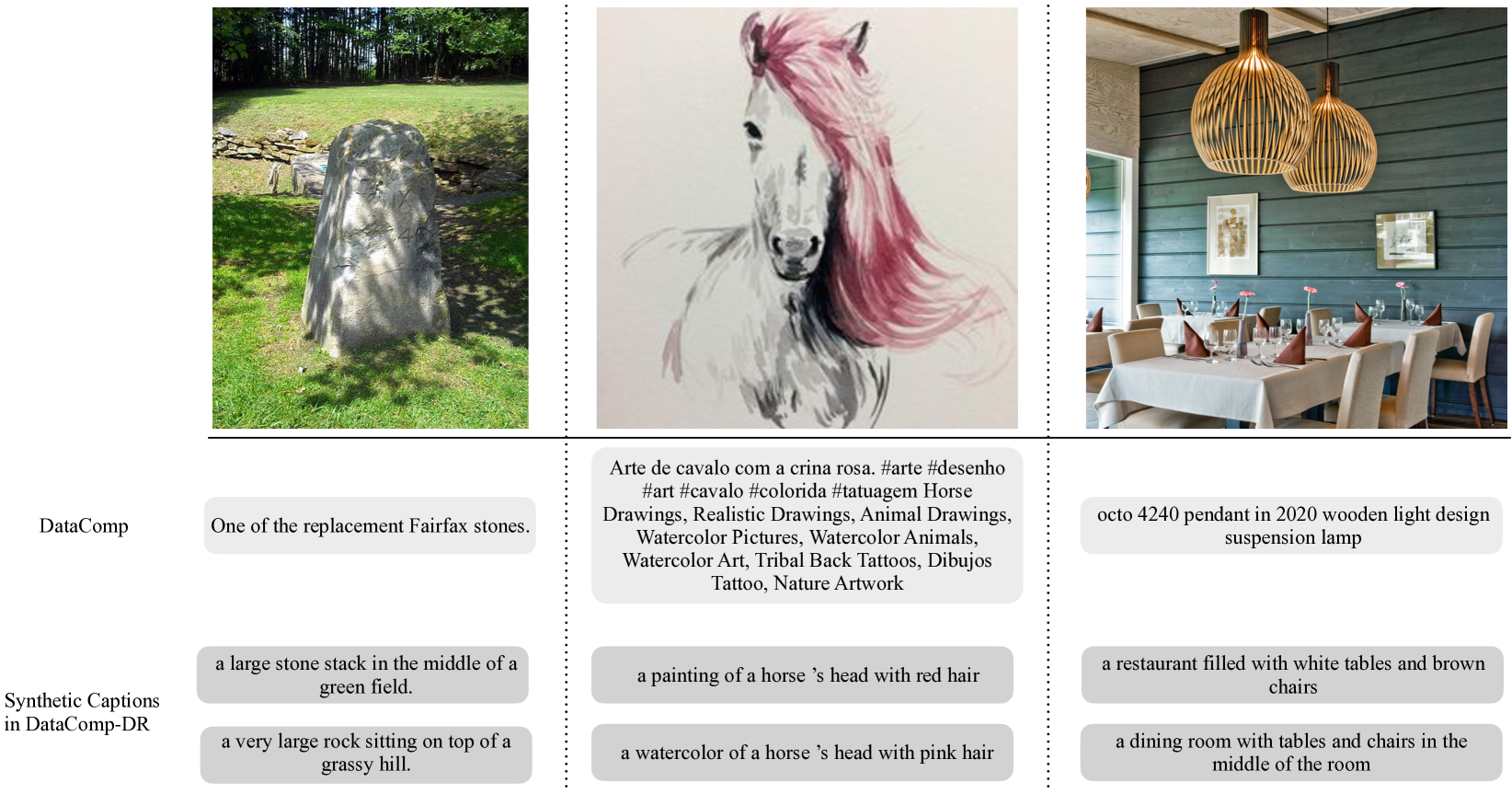
CLIP models perform remarkably well on zero-shot classification and retrieval tasks. But recent studies have shown that learnt representations in CLIP are not well suited for dense prediction tasks like object detection, semantic segmentation or depth estimation. More recently, multi-stage training methods for CLIP models was introduced to mitigate the weak performance of CLIP on downstream tasks. In this work, we find that simply improving the quality of captions in image-text datasets improves the quality of CLIP's visual representations, resulting in significant improvement on downstream dense prediction vision tasks. In fact, we find that CLIP pretraining with good quality captions can surpass recent supervised, self-supervised and weakly supervised pretraining methods. We show that when CLIP model with ViT-B/16 as image encoder is trained on well aligned image-text pairs it obtains 12.1% higher mIoU and 11.5% lower RMSE on semantic segmentation and depth estimation tasks over recent state-of-the-art Masked Image Modeling (MIM) pretraining methods like Masked Autoencoder (MAE). We find that mobile architectures also benefit significantly from CLIP pretraining. A recent mobile vision architecture, MCi2, with CLIP pretraining obtains similar performance as Swin-L, pretrained on ImageNet-22k for semantic segmentation task while being 6.1$times$ smaller. Moreover, we show that improving caption quality results in $10times$ data efficiency when finetuning for dense prediction tasks.
Read more5/16/2024
🔎
0
Incremental Object Detection with CLIP
Ziyue Huang, Yupeng He, Qingjie Liu, Yunhong Wang
In contrast to the incremental classification task, the incremental detection task is characterized by the presence of data ambiguity, as an image may have differently labeled bounding boxes across multiple continuous learning stages. This phenomenon often impairs the model's ability to effectively learn new classes. However, existing research has paid less attention to the forward compatibility of the model, which limits its suitability for incremental learning. To overcome this obstacle, we propose leveraging a visual-language model such as CLIP to generate text feature embeddings for different class sets, which enhances the feature space globally. We then employ super-classes to replace the unavailable novel classes in the early learning stage to simulate the incremental scenario. Finally, we utilize the CLIP image encoder to accurately identify potential objects. We incorporate the finely recognized detection boxes as pseudo-annotations into the training process, thereby further improving the detection performance. We evaluate our approach on various incremental learning settings using the PASCAL VOC 2007 dataset, and our approach outperforms state-of-the-art methods, particularly for recognizing the new classes.
Read more7/10/2024
0
Raising the Bar of AI-generated Image Detection with CLIP
Davide Cozzolino, Giovanni Poggi, Riccardo Corvi, Matthias Nie{ss}ner, Luisa Verdoliva
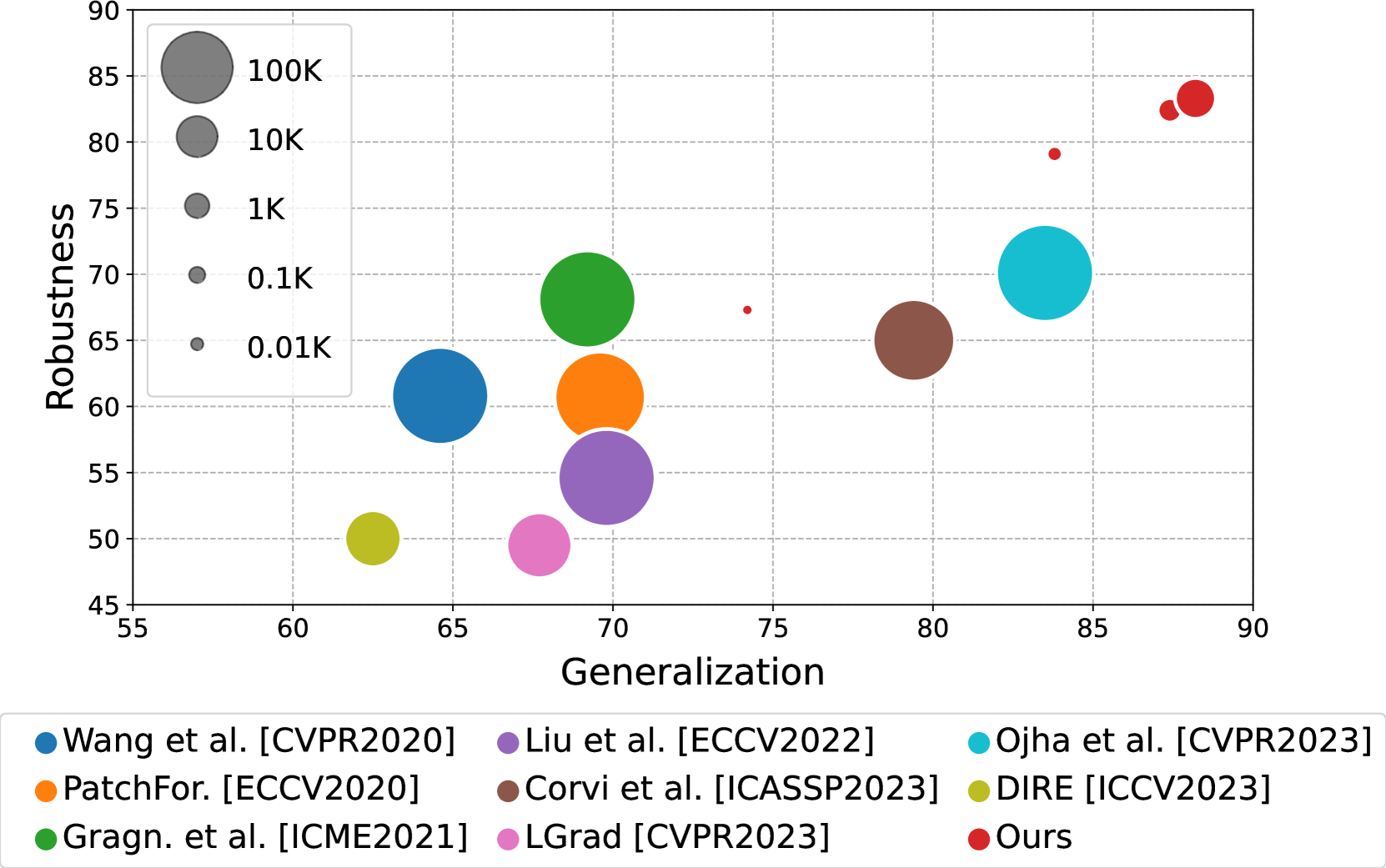
The aim of this work is to explore the potential of pre-trained vision-language models (VLMs) for universal detection of AI-generated images. We develop a lightweight detection strategy based on CLIP features and study its performance in a wide variety of challenging scenarios. We find that, contrary to previous beliefs, it is neither necessary nor convenient to use a large domain-specific dataset for training. On the contrary, by using only a handful of example images from a single generative model, a CLIP-based detector exhibits surprising generalization ability and high robustness across different architectures, including recent commercial tools such as Dalle-3, Midjourney v5, and Firefly. We match the state-of-the-art (SoTA) on in-distribution data and significantly improve upon it in terms of generalization to out-of-distribution data (+6% AUC) and robustness to impaired/laundered data (+13%). Our project is available at https://grip-unina.github.io/ClipBased-SyntheticImageDetection/
Read more4/30/2024