Evaluating Force-based Haptics for Immersive Tangible Interactions with Surface Visualizations

0

Sign in to get full access
Overview
- Examines the use of force-based haptics for immersive tangible interactions with surface visualizations
- Explores how force feedback can enhance the user experience and perception of virtual surfaces
- Conducted experiments to evaluate the effectiveness of force-based haptics in this context
Plain English Explanation
This research paper investigates the use of force-based haptics to improve the experience of interacting with surface visualizations in immersive virtual environments. The researchers wanted to see how providing users with physical force feedback could enhance their perception and understanding of virtual surfaces.
To do this, they conducted a series of experiments where participants interacted with different types of virtual surfaces using either traditional visual feedback or a combination of visual and force-based haptic feedback. The researchers measured factors like task performance, user preference, and the overall sense of immersion to evaluate the effectiveness of the force-based haptic approach.
The results suggest that incorporating force feedback can indeed enhance the user experience and make interactions with virtual surfaces feel more natural and tangible. Participants reported a stronger sense of presence and a better understanding of the virtual environments when haptic cues were added.
Technical Explanation
The paper describes an experiment that evaluated the use of force-based haptics to enhance the experience of interacting with surface visualizations in immersive virtual environments. The researchers developed a system that used a force-feedback device to provide physical sensations corresponding to the properties of virtual surfaces, such as texture, shape, and stiffness.
Participants were tasked with various interactions, such as tracing virtual contours or manipulating surface features, using either a visual-only interface or a combined visual-haptic interface. The researchers measured performance metrics like task completion time and accuracy, as well as subjective feedback on factors like perceived realism, ease of use, and overall preference.
The results showed that the addition of force-based haptic feedback led to improved task performance, heightened sense of presence, and greater user satisfaction compared to the visual-only condition. Participants reported that the haptic cues helped them better understand and interact with the virtual surfaces in a more natural and intuitive way.
Critical Analysis
The paper provides valuable insights into the potential benefits of incorporating force-based haptics into surface visualization systems. The experimental design and analysis seem rigorous, and the findings offer promising evidence for the value of this approach.
However, the research is limited to a specific set of tasks and virtual environments. It would be interesting to see how the results scale to more complex or diverse scenarios, such as collaborative online learning or educational applications that leverage surface visualizations.
Additionally, the paper does not explore the potential limitations or drawbacks of force-based haptics, such as the technical complexity, cost, or user acceptance. Further research could investigate these factors and identify the optimal use cases and design considerations for incorporating haptic feedback in immersive virtual experiences.
Conclusion
This research paper demonstrates the potential benefits of using force-based haptics to enhance the user experience and perception of surface visualizations in immersive virtual environments. The experimental findings suggest that the addition of physical force feedback can improve task performance, increase the sense of presence, and lead to greater user satisfaction compared to visual-only interfaces.
The insights from this work could have important implications for the design of future virtual and augmented reality applications, particularly in areas that rely on the accurate representation and manipulation of virtual surfaces, such as remote collaboration, educational experiences, and teleoperation. Further research in this area could help unlock the full potential of tangible, force-based interactions in immersive virtual environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Evaluating Force-based Haptics for Immersive Tangible Interactions with Surface Visualizations
Hamza Afzaal, Usman Alim
Haptic feedback provides an essential sensory stimulus crucial for interaction and analyzing three-dimensional spatio-temporal phenomena on surface visualizations. Given its ability to provide enhanced spatial perception and scene maneuverability, virtual reality (VR) catalyzes haptic interactions on surface visualizations. Various interaction modes, encompassing both mid-air and on-surface interactions -- with or without the application of assisting force stimuli -- have been explored using haptic force feedback devices. In this paper, we evaluate the use of on-surface and assisted on-surface haptic modes of interaction compared to a no-haptic interaction mode. A force-based haptic stylus is used for all three modalities; the on-surface mode uses collision based forces, whereas the assisted on-surface mode is accompanied by an additional snapping force. We conducted a within-subjects user study involving fundamental interaction tasks performed on surface visualizations. Keeping a consistent visual design across all three modes, our study incorporates tasks that require the localization of the highest, lowest, and random points on surfaces; and tasks that focus on brushing curves on surfaces with varying complexity and occlusion levels. Our findings show that participants took almost the same time to brush curves using all the interaction modes. They could draw smoother curves using the on-surface interaction modes compared to the no-haptic mode. However, the assisted on-surface mode provided better accuracy than the on-surface mode. The on-surface mode was slower in point localization, but the accuracy depended on the visual cues and occlusions associated with the tasks. Finally, we discuss participant feedback on using haptic force feedback as a tangible input modality and share takeaways to aid the design of haptics-based tangible interactions for surface visualizations.
Read more9/11/2024
💬
0
Pseudo-Haptics Survey: Human-Computer Interaction in Extended Reality & Teleoperation
Rui Xavier, Jos'e Lu'is Silva, Rodrigo Ventura, Joaquim Jorge
Pseudo-haptic techniques are becoming increasingly popular in human-computer interaction. They replicate haptic sensations by leveraging primarily visual feedback rather than mechanical actuators. These techniques bridge the gap between the real and virtual worlds by exploring the brain's ability to integrate visual and haptic information. One of the many advantages of pseudo-haptic techniques is that they are cost-effective, portable, and flexible. They eliminate the need for direct attachment of haptic devices to the body, which can be heavy and large and require a lot of power and maintenance. Recent research has focused on applying these techniques to extended reality and mid-air interactions. To better understand the potential of pseudo-haptic techniques, the authors developed a novel taxonomy encompassing tactile feedback, kinesthetic feedback, and combined categories in multimodal approaches, ground not covered by previous surveys. This survey highlights multimodal strategies and potential avenues for future studies, particularly regarding integrating these techniques into extended reality and collaborative virtual environments.
Read more6/4/2024
📈
0
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Noah Becker, Erik Gattung, Kay Hansel, Tim Schneider, Yaonan Zhu, Yasuhisa Hasegawa, Jan Peters
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
Read more5/1/2024
0
Voluminous Fur Stroking Experience through Interactive Visuo-Haptic Model in Virtual Reality
Juro Hosoi, Du Jin, Yuki Ban, Shin'ichi Warisawa
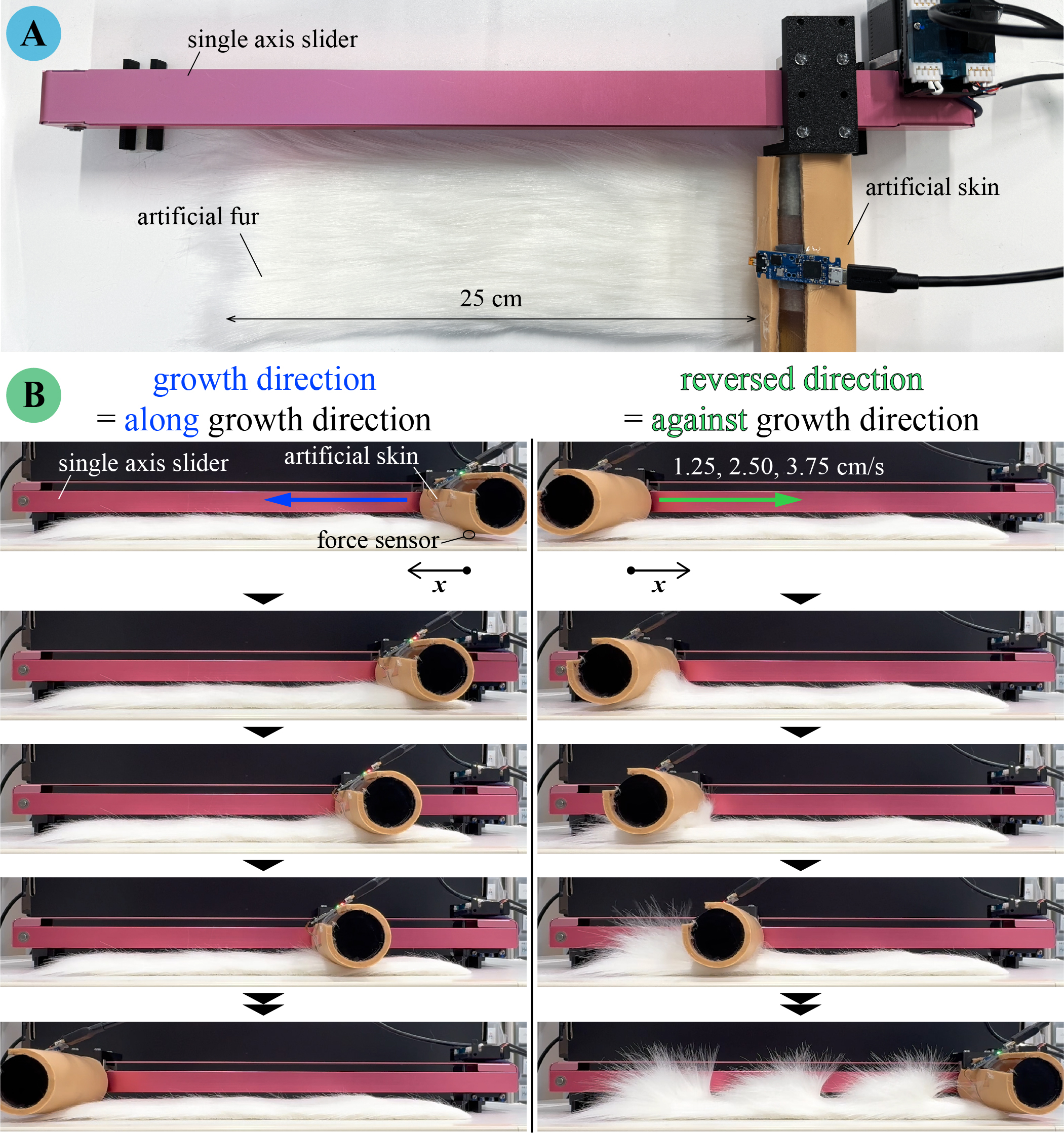
The tactile sensation of stroking soft fur, known for its comfort and emotional benefits, has numerous applications in virtual reality, animal-assisted therapy, and household products. Previous studies have primarily utilized actual fur to present a voluminous fur experience that poses challenges concerning versatility and flexibility. In this study, we develop a system that integrates a head-mounted display with an ultrasound haptic display to provide visual and haptic feedback. Measurements taken using an artificial skin sheet reveal directional differences in tactile and visual responses to voluminous fur. Based on observations and measurements, we propose interactive models that dynamically adjust to hand movements, simulating fur-stroking sensations. Our experiments demonstrate that the proposed model using visual and haptic modalities significantly enhances the realism of a fur-stroking experience. Our findings suggest that the interactive visuo-haptic model offers a promising fur-stroking experience in virtual reality, potentially enhancing the user experience in therapeutic, entertainment, and retail applications.
Read more7/1/2024