Voluminous Fur Stroking Experience through Interactive Visuo-Haptic Model in Virtual Reality

0
Sign in to get full access
Overview
• This paper explores a new way to simulate the experience of stroking voluminous fur in virtual reality (VR) using a combination of visual and haptic feedback. • The researchers developed an interactive visuo-haptic model that can recreate the tactile sensations of interacting with plush, furry objects in a VR environment. • This technology could have applications in areas like gaming, entertainment, and therapeutic treatments that involve sensory experiences.
Plain English Explanation
The researchers in this study wanted to find a way to make virtual reality (VR) feel more real and immersive by simulating the sensation of touching and stroking soft, furry objects. To do this, they created a new system that combines visual and haptic (touch-based) feedback.
Normally, when you interact with objects in VR, you only get visual information - you can see the object but you can't really feel it. The researchers' system uses special hardware to provide a more lifelike experience. When you reach out and "touch" the virtual fur, you feel a gentle, fuzzy sensation on your hand, just like you would in the real world.
This type of multi-sensory VR technology could be useful for all sorts of applications. For example, it could make video games and movies feel more immersive and realistic. It might also have therapeutic uses, like helping people with sensory processing disorders or anxiety disorders by allowing them to safely experience comforting tactile sensations.
The key innovation in this paper is the way the researchers designed their visuo-haptic model to simulate the unique properties of fur, like its volume, texture, and responsiveness to touch. This allows users to have a surprisingly natural and satisfying stroking experience in VR.
Technical Explanation
The researchers developed an interactive visuo-haptic model to create a realistic fur-stroking experience in virtual reality. Their system uses a combination of visual rendering and mid-air haptic feedback to simulate the physical properties of fur.
The visual component renders a highly detailed 3D model of fur with realistic volume, density, and movement. The haptic feedback is generated by an array of ultrasonic transducers that create localized areas of air pressure, allowing users to feel the fur's texture and resistance when they interact with it.
The researchers conducted experiments to validate their visuo-haptic model, measuring factors like perceived realism, texture, and overall user experience. Their results showed that this multimodal approach significantly enhanced the sense of presence and engagement compared to visual-only VR experiences.
Critical Analysis
The researchers provide a thoughtful discussion of the limitations and potential issues with their approach. For example, they note that the current haptic hardware is limited in its ability to fully recreate the rich tactile experience of real fur, especially in terms of temperature and moisture cues.
Additionally, the researchers acknowledge that their experiments were relatively small in scale, and that further research is needed to fully understand how this technology might be applied in real-world scenarios, such as therapeutic treatments or entertainment applications.
One potential area of concern is the potential for this technology to be used in unethical ways, such as creating overly immersive and potentially addictive virtual experiences. The researchers do not address this issue, but it is an important consideration as this type of technology becomes more advanced and accessible.
Overall, the researchers have made an important contribution to the field of multisensory extended reality applications, demonstrating the potential for haptic feedback to enhance the realism and immersion of virtual experiences. However, further research and careful consideration of the ethical implications will be crucial as this technology continues to evolve.
Conclusion
This paper presents a novel visuo-haptic model that can recreate the experience of stroking soft, voluminous fur in a virtual reality environment. By combining advanced visual rendering with mid-air haptic feedback, the researchers have developed a system that significantly enhances the sense of presence and engagement for users.
The potential applications of this technology are wide-ranging, from gaming and entertainment to therapeutic treatments. As virtual and augmented reality continue to advance, the ability to create more immersive, multisensory experiences will become increasingly important.
While the current limitations of the haptic hardware suggest that further refinement is needed, the researchers have taken an important step forward in the quest to make virtual experiences feel more lifelike and engaging. As this field continues to evolve, it will be crucial to carefully consider the ethical implications of such technologies and ensure they are developed and used responsibly.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Voluminous Fur Stroking Experience through Interactive Visuo-Haptic Model in Virtual Reality
Juro Hosoi, Du Jin, Yuki Ban, Shin'ichi Warisawa
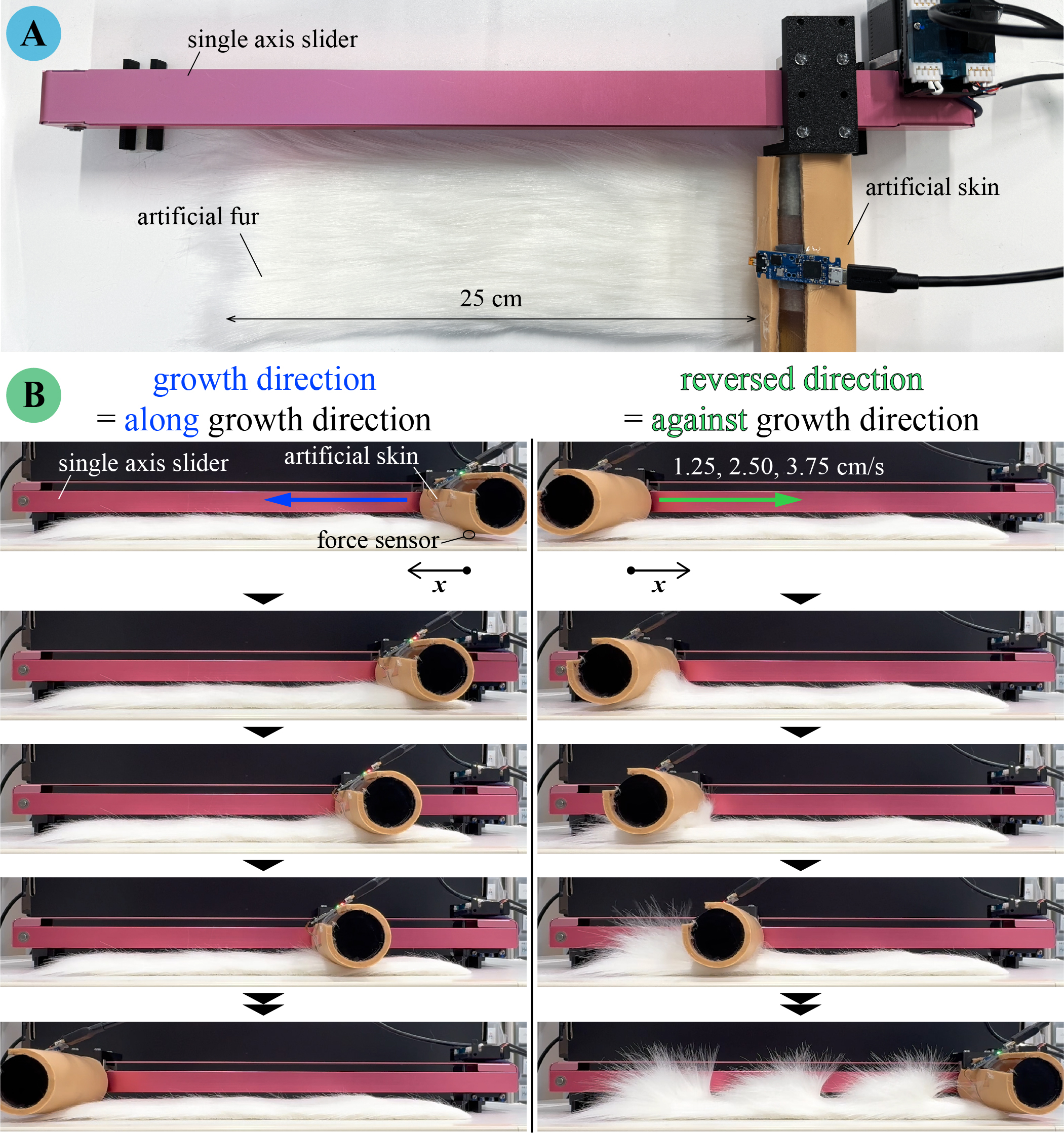
The tactile sensation of stroking soft fur, known for its comfort and emotional benefits, has numerous applications in virtual reality, animal-assisted therapy, and household products. Previous studies have primarily utilized actual fur to present a voluminous fur experience that poses challenges concerning versatility and flexibility. In this study, we develop a system that integrates a head-mounted display with an ultrasound haptic display to provide visual and haptic feedback. Measurements taken using an artificial skin sheet reveal directional differences in tactile and visual responses to voluminous fur. Based on observations and measurements, we propose interactive models that dynamically adjust to hand movements, simulating fur-stroking sensations. Our experiments demonstrate that the proposed model using visual and haptic modalities significantly enhances the realism of a fur-stroking experience. Our findings suggest that the interactive visuo-haptic model offers a promising fur-stroking experience in virtual reality, potentially enhancing the user experience in therapeutic, entertainment, and retail applications.
Read more7/1/2024

0
Evaluating Force-based Haptics for Immersive Tangible Interactions with Surface Visualizations
Hamza Afzaal, Usman Alim
Haptic feedback provides an essential sensory stimulus crucial for interaction and analyzing three-dimensional spatio-temporal phenomena on surface visualizations. Given its ability to provide enhanced spatial perception and scene maneuverability, virtual reality (VR) catalyzes haptic interactions on surface visualizations. Various interaction modes, encompassing both mid-air and on-surface interactions -- with or without the application of assisting force stimuli -- have been explored using haptic force feedback devices. In this paper, we evaluate the use of on-surface and assisted on-surface haptic modes of interaction compared to a no-haptic interaction mode. A force-based haptic stylus is used for all three modalities; the on-surface mode uses collision based forces, whereas the assisted on-surface mode is accompanied by an additional snapping force. We conducted a within-subjects user study involving fundamental interaction tasks performed on surface visualizations. Keeping a consistent visual design across all three modes, our study incorporates tasks that require the localization of the highest, lowest, and random points on surfaces; and tasks that focus on brushing curves on surfaces with varying complexity and occlusion levels. Our findings show that participants took almost the same time to brush curves using all the interaction modes. They could draw smoother curves using the on-surface interaction modes compared to the no-haptic mode. However, the assisted on-surface mode provided better accuracy than the on-surface mode. The on-surface mode was slower in point localization, but the accuracy depended on the visual cues and occlusions associated with the tasks. Finally, we discuss participant feedback on using haptic force feedback as a tangible input modality and share takeaways to aid the design of haptics-based tangible interactions for surface visualizations.
Read more9/11/2024
🖼️
0
Multisensory extended reality applications offer benefits for volumetric biomedical image analysis in research and medicine
Kathrin Krieger, Jan Egger, Jens Kleesiek, Matthias Gunzer, Jianxu Chen
3D data from high-resolution volumetric imaging is a central resource for diagnosis and treatment in modern medicine. While the fast development of AI enhances imaging and analysis, commonly used visualization methods lag far behind. Recent research used extended reality (XR) for perceiving 3D images with visual depth perception and touch but used restrictive haptic devices. While unrestricted touch benefits volumetric data examination, implementing natural haptic interaction with XR is challenging. The research question is whether a multisensory XR application with intuitive haptic interaction adds value and should be pursued. In a study, 24 experts for biomedical images in research and medicine explored 3D medical shapes with 3 applications: a multisensory virtual reality (VR) prototype using haptic gloves, a simple VR prototype using controllers, and a standard PC application. Results of standardized questionnaires showed no significant differences between all application types regarding usability and no significant difference between both VR applications regarding presence. Participants agreed to statements that VR visualizations provide better depth information, using the hands instead of controllers simplifies data exploration, the multisensory VR prototype allows intuitive data exploration, and it is beneficial over traditional data examination methods. While most participants mentioned manual interaction as best aspect, they also found it the most improvable. We conclude that a multisensory XR application with improved manual interaction adds value for volumetric biomedical data examination. We will proceed with our open-source research project ISH3DE (Intuitive Stereoptic Haptic 3D Data Exploration) to serve medical education, therapeutic decisions, surgery preparations, or research data analysis.
Read more6/17/2024

0
Stretch or Vibrate? Rendering Spatial Information of Static and Moving Objects in VR via Haptic Feedback for Blind People
Jiasheng Li, Zining Zhang, Zeyu Yan, Yuhang Zhao, Huaishu Peng
Perceiving spatial information of a virtual object (e.g., direction, distance) is critical yet challenging for blind users seeking an immersive virtual reality experience. To facilitate VR accessibility for blind users, in this paper, we investigate the effectiveness of two types of haptic cues--vibrotactile and skin-stretch cues--in conveying the spatial information of a virtual object when applied to the dorsal side of a blind user's hand. We conducted a user study with 10 blind users to investigate how they perceive static and moving objects in VR with a custom-made haptic apparatus. Our results reveal that blind users can more accurately understand an object's location and movement when receiving skin-stretch cues, as opposed to vibrotactile cues. We discuss the pros and cons of both types of haptic cues and conclude with design recommendations for future haptic solutions for VR accessibility.
Read more8/14/2024