An evaluation of CNN models and data augmentation techniques in hierarchical localization of mobile robots

0

Sign in to get full access
Overview
- This paper evaluates different convolutional neural network (CNN) models and data augmentation techniques for hierarchical localization of mobile robots using panoramic images.
- The researchers investigate the performance of various CNN architectures and study the impact of different data augmentation strategies on the localization accuracy.
- The goal is to develop robust and efficient localization systems for mobile robots that can handle challenging environmental conditions and sensor degradation.
Plain English Explanation
The paper focuses on helping mobile robots figure out their location more accurately using panoramic camera images. Mobile robots, like self-driving cars or household cleaning bots, need to know where they are in order to navigate properly. The researchers tried out different deep learning models, which are a type of AI algorithm that can learn patterns from data, to see which ones work best for this localization task.
They also tested various techniques to modify the training data in order to make the models more robust to things like blurry or distorted images. The goal is to create localization systems that can work reliably even when the robot's sensors aren't perfect or the environment is challenging.
Technical Explanation
The paper evaluates the performance of several CNN architectures, including VGG, ResNet, and EfficientNet, for hierarchical localization using panoramic images. Hierarchical localization involves first predicting the room or area the robot is in, and then refining the position within that room.
The researchers also investigate the impact of different data augmentation techniques, such as image rotation, scaling, and blurring, on the localization accuracy. They use a triplet loss function to train the models to learn discriminative features for localization.
The experiments are conducted on a large-scale dataset of panoramic images captured by mobile robots in various indoor environments. The results show that the EfficientNet-B4 architecture combined with appropriate data augmentation techniques outperforms other CNN models in terms of both room-level and position-level localization accuracy.
Critical Analysis
The paper provides a thorough evaluation of different CNN models and data augmentation strategies for hierarchical localization, which is a crucial capability for mobile robots. However, the researchers acknowledge that the dataset used in the study may not capture the full range of environmental conditions and sensor degradation that robots might encounter in real-world scenarios.
Further research is needed to explore the generalization of these techniques to more diverse and challenging environments, as well as to investigate the computational and memory footprint of the models for deployment on resource-constrained robotic platforms.
Conclusion
This paper presents a comprehensive study on the performance of CNN-based hierarchical localization systems for mobile robots using panoramic images. The findings suggest that the EfficientNet-B4 architecture with carefully designed data augmentation strategies can achieve state-of-the-art localization accuracy, paving the way for more robust and efficient localization systems for mobile robots operating in complex environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An evaluation of CNN models and data augmentation techniques in hierarchical localization of mobile robots
J. J. Cabrera, O. J. C'espedes, S. Cebollada, O. Reinoso, L. Pay'a
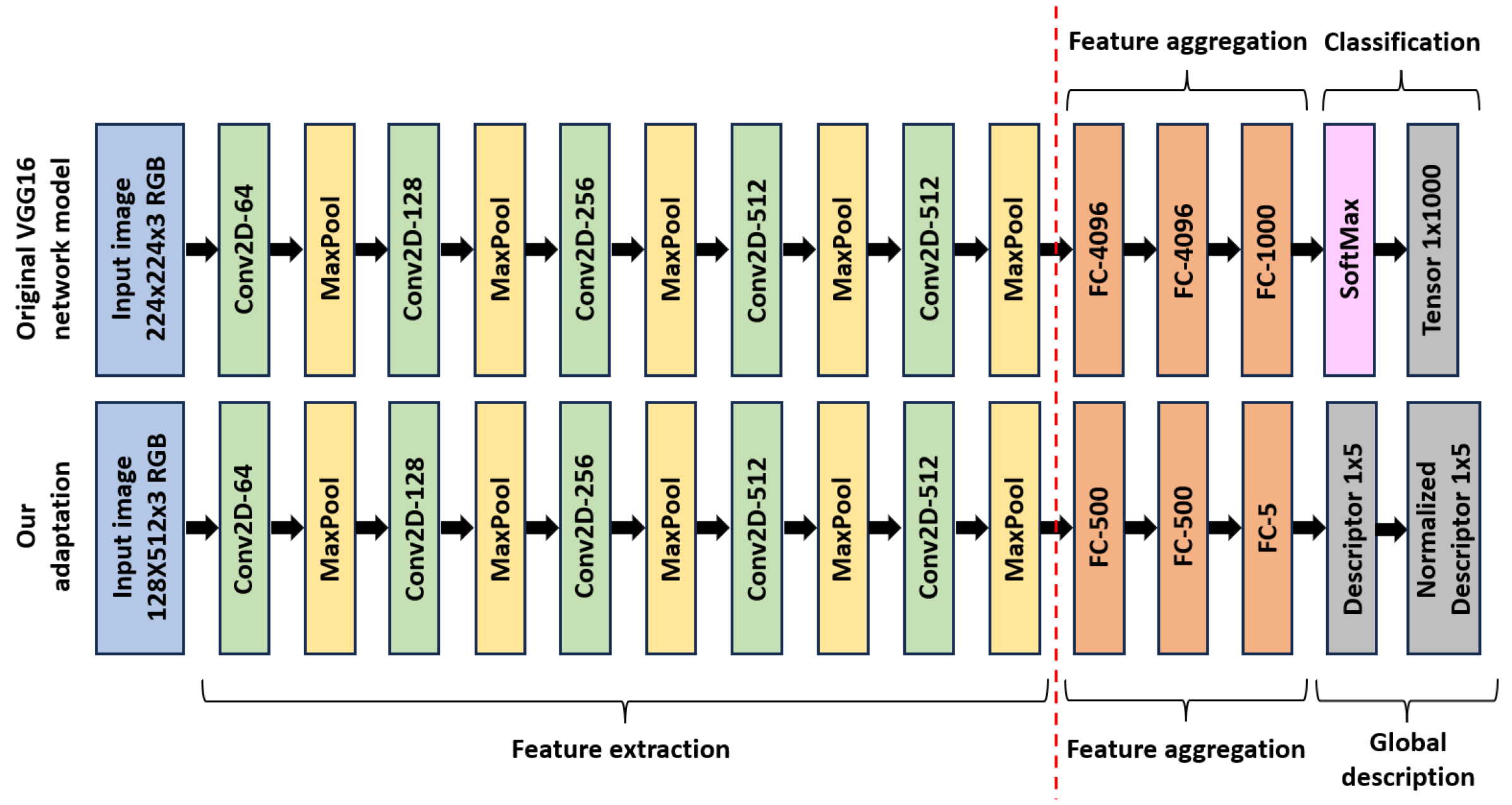
This work presents an evaluation of CNN models and data augmentation to carry out the hierarchical localization of a mobile robot by using omnidireccional images. In this sense, an ablation study of different state-of-the-art CNN models used as backbone is presented and a variety of data augmentation visual effects are proposed for addressing the visual localization of the robot. The proposed method is based on the adaption and re-training of a CNN with a dual purpose: (1) to perform a rough localization step in which the model is used to predict the room from which an image was captured, and (2) to address the fine localization step, which consists in retrieving the most similar image of the visual map among those contained in the previously predicted room by means of a pairwise comparison between descriptors obtained from an intermediate layer of the CNN. In this sense, we evaluate the impact of different state-of-the-art CNN models such as ConvNeXt for addressing the proposed localization. Finally, a variety of data augmentation visual effects are separately employed for training the model and their impact is assessed. The performance of the resulting CNNs is evaluated under real operation conditions, including changes in the lighting conditions. Our code is publicly available on the project website https://github.com/juanjo-cabrera/IndoorLocalizationSingleCNN.git
Read more7/16/2024
0
Hierarchical localization with panoramic views and triplet loss functions
Marcos Alfaro, Juan Jos'e Cabrera, Luis Miguel Jim'enez, 'Oscar Reinoso, Luis Pay'a
The main objective of this paper is to address the mobile robot localization problem with Triplet Convolutional Neural Networks and test their robustness against changes of the lighting conditions. We have used omnidirectional images from real indoor environments captured in dynamic conditions that have been converted to panoramic format. Two approaches are proposed to address localization by means of triplet neural networks. First, hierarchical localization, which consists in estimating the robot position in two stages: a coarse localization, which involves a room retrieval task, and a fine localization is addressed by means of image retrieval in the previously selected room. Second, global localization, which consists in estimating the position of the robot inside the entire map in a unique step. Besides, an exhaustive study of the loss function influence on the network learning process has been made. The experimental section proves that triplet neural networks are an efficient and robust tool to address the localization of mobile robots in indoor environments, considering real operation conditions.
Read more4/23/2024

0
An experimental evaluation of Siamese Neural Networks for robot localization using omnidirectional imaging in indoor environments
J. J. Cabrera, V. Rom'an, A. Gil, O. Reinoso, L. Pay'a
The objective of this paper is to address the localization problem using omnidirectional images captured by a catadioptric vision system mounted on the robot. For this purpose, we explore the potential of Siamese Neural Networks for modeling indoor environments using panoramic images as the unique source of information. Siamese Neural Networks are characterized by their ability to generate a similarity function between two input data, in this case, between two panoramic images. In this study, Siamese Neural Networks composed of two Convolutional Neural Networks (CNNs) are used. The output of each CNN is a descriptor which is used to characterize each image. The dissimilarity of the images is computed by measuring the distance between these descriptors. This fact makes Siamese Neural Networks particularly suitable to perform image retrieval tasks. First, we evaluate an initial task strongly related to localization that consists in detecting whether two images have been captured in the same or in different rooms. Next, we assess Siamese Neural Networks in the context of a global localization problem. The results outperform previous techniques for solving the localization task using the COLD-Freiburg dataset, in a variety of lighting conditions, specially when using images captured in cloudy and night conditions.
Read more7/16/2024
🧠
0
Localization Through Particle Filter Powered Neural Network Estimated Monocular Camera Poses
Yi Shen, Hao Liu, Xinxin Liu, Wenjing Zhou, Chang Zhou, Yizhou Chen
The reduced cost and computational and calibration requirements of monocular cameras make them ideal positioning sensors for mobile robots, albeit at the expense of any meaningful depth measurement. Solutions proposed by some scholars to this localization problem involve fusing pose estimates from convolutional neural networks (CNNs) with pose estimates from geometric constraints on motion to generate accurate predictions of robot trajectories. However, the distribution of attitude estimation based on CNN is not uniform, resulting in certain translation problems in the prediction of robot trajectories. This paper proposes improving these CNN-based pose estimates by propagating a SE(3) uniform distribution driven by a particle filter. The particles utilize the same motion model used by the CNN, while updating their weights using CNN-based estimates. The results show that while the rotational component of pose estimation does not consistently improve relative to CNN-based estimation, the translational component is significantly more accurate. This factor combined with the superior smoothness of the filtered trajectories shows that the use of particle filters significantly improves the performance of CNN-based localization algorithms.
Read more4/30/2024