An experimental evaluation of Siamese Neural Networks for robot localization using omnidirectional imaging in indoor environments

0

Sign in to get full access
Overview
- This paper experimentally evaluates the use of Siamese Neural Networks for robot localization in indoor environments using omnidirectional imaging.
- Siamese Neural Networks are a type of deep learning model that can learn to compare and match similar images.
- The researchers tested this approach for robot localization, which is the task of determining a robot's position and orientation within a known environment.
- Omnidirectional imaging refers to the use of 360-degree cameras that capture a full view of the surroundings.
Plain English Explanation
The paper looks at using a special kind of artificial intelligence called a Siamese Neural Network to help robots figure out where they are in a building. Robots often need to know their exact location to do their jobs properly, and one way to do this is by taking pictures with 360-degree cameras and comparing them to a map of the building.
[The researchers describe how they used a Siamese Neural Network to analyze these 360-degree pictures and match them to the correct spot on the map. This allows the robot to determine its position and orientation (which way it's facing) with a high degree of accuracy.](https://aimodels.fyi/papers/arxiv/hierarchical-localization-panoramic-views-triplet-loss-functions)
The key idea is that the Siamese Network can learn to recognize patterns and features in the 360-degree images that uniquely identify different locations in the building. By training the network on a large dataset of images and their corresponding locations, it can then take a new image from the robot's camera and quickly figure out where in the building that image was taken.
Technical Explanation
The researchers designed an experiment to test the performance of Siamese Neural Networks for robot localization using omnidirectional imaging in indoor environments. They collected a dataset of 360-degree images from various locations within a multi-story office building and used this data to train and evaluate their Siamese Network model.
The Siamese Network architecture consists of two identical neural network branches that each process an input image. The network is trained to minimize the distance between the feature representations of matching image pairs (taken from the same location) and maximize the distance for non-matching pairs. This allows the model to learn discriminative features that can be used to uniquely identify different locations in the environment.
The researchers also experimented with different data augmentation techniques, such as random rotations and flips, to improve the model's robustness and generalization capabilities. They evaluated the Siamese Network's localization accuracy on a held-out test set of images and compared its performance to other deep learning approaches.
Critical Analysis
The paper provides a thorough experimental evaluation of using Siamese Neural Networks for robot localization, but there are a few potential limitations and areas for further research:
-
The dataset was collected from a single multi-story office building, so the generalizability of the approach to other types of indoor environments is not fully established. Additional testing in diverse settings, such as homes, warehouses, or hospitals, would help validate the robustness of the method.
-
The paper does not explore the use of additional sensor modalities, such as depth information from RGB-D cameras or inertial measurements, which could potentially improve localization accuracy and robustness. Incorporating multi-modal data could be an interesting area for future research.
-
The authors mention that the Siamese Network approach can be sensitive to changes in the environment, such as furniture rearrangement or lighting conditions. [Investigating more advanced techniques, like asymmetrical Siamese networks, could help address this limitation and improve the model's adaptability to dynamic environments.](https://aimodels.fyi/papers/arxiv/asymmetrical-siamese-network-point-clouds-normal-estimation)
Overall, the paper presents a promising approach for robot localization using Siamese Neural Networks and omnidirectional imaging, but further research is needed to fully understand the capabilities and limitations of this technique.
Conclusion
This paper experimentally evaluates the use of Siamese Neural Networks for robot localization in indoor environments using omnidirectional imaging. The results demonstrate that this approach can effectively learn discriminative features from 360-degree images to accurately identify a robot's position and orientation within a known building.
The key innovation is the Siamese Network architecture, which allows the model to learn similarity-based comparisons between images. By training the network on a dataset of images and their corresponding locations, it can then take a new image from a robot's camera and quickly determine where in the building that image was taken.
The paper provides a thorough evaluation of this technique, exploring different data augmentation strategies and comparing the Siamese Network's performance to other deep learning approaches. While the results are promising, the authors identify several areas for potential future research, such as expanding the testing to diverse indoor environments and incorporating additional sensor modalities.
Overall, this work contributes to the ongoing development of robust and accurate localization methods for mobile robots, which is a critical capability for a wide range of applications, from autonomous navigation to search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An experimental evaluation of Siamese Neural Networks for robot localization using omnidirectional imaging in indoor environments
J. J. Cabrera, V. Rom'an, A. Gil, O. Reinoso, L. Pay'a
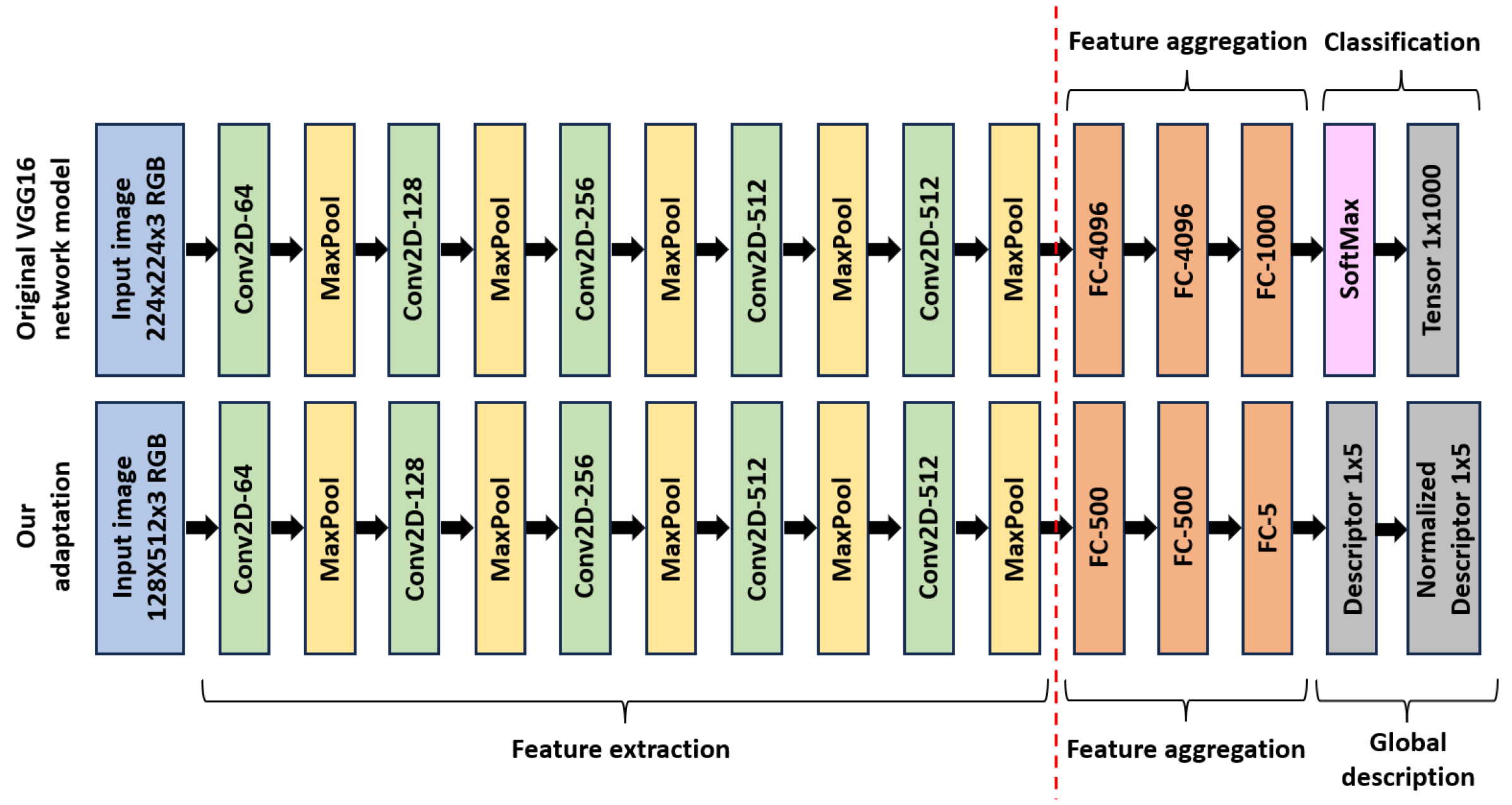
The objective of this paper is to address the localization problem using omnidirectional images captured by a catadioptric vision system mounted on the robot. For this purpose, we explore the potential of Siamese Neural Networks for modeling indoor environments using panoramic images as the unique source of information. Siamese Neural Networks are characterized by their ability to generate a similarity function between two input data, in this case, between two panoramic images. In this study, Siamese Neural Networks composed of two Convolutional Neural Networks (CNNs) are used. The output of each CNN is a descriptor which is used to characterize each image. The dissimilarity of the images is computed by measuring the distance between these descriptors. This fact makes Siamese Neural Networks particularly suitable to perform image retrieval tasks. First, we evaluate an initial task strongly related to localization that consists in detecting whether two images have been captured in the same or in different rooms. Next, we assess Siamese Neural Networks in the context of a global localization problem. The results outperform previous techniques for solving the localization task using the COLD-Freiburg dataset, in a variety of lighting conditions, specially when using images captured in cloudy and night conditions.
Read more7/16/2024
0
Hierarchical localization with panoramic views and triplet loss functions
Marcos Alfaro, Juan Jos'e Cabrera, Luis Miguel Jim'enez, 'Oscar Reinoso, Luis Pay'a
The main objective of this paper is to address the mobile robot localization problem with Triplet Convolutional Neural Networks and test their robustness against changes of the lighting conditions. We have used omnidirectional images from real indoor environments captured in dynamic conditions that have been converted to panoramic format. Two approaches are proposed to address localization by means of triplet neural networks. First, hierarchical localization, which consists in estimating the robot position in two stages: a coarse localization, which involves a room retrieval task, and a fine localization is addressed by means of image retrieval in the previously selected room. Second, global localization, which consists in estimating the position of the robot inside the entire map in a unique step. Besides, an exhaustive study of the loss function influence on the network learning process has been made. The experimental section proves that triplet neural networks are an efficient and robust tool to address the localization of mobile robots in indoor environments, considering real operation conditions.
Read more4/23/2024

0
An evaluation of CNN models and data augmentation techniques in hierarchical localization of mobile robots
J. J. Cabrera, O. J. C'espedes, S. Cebollada, O. Reinoso, L. Pay'a
This work presents an evaluation of CNN models and data augmentation to carry out the hierarchical localization of a mobile robot by using omnidireccional images. In this sense, an ablation study of different state-of-the-art CNN models used as backbone is presented and a variety of data augmentation visual effects are proposed for addressing the visual localization of the robot. The proposed method is based on the adaption and re-training of a CNN with a dual purpose: (1) to perform a rough localization step in which the model is used to predict the room from which an image was captured, and (2) to address the fine localization step, which consists in retrieving the most similar image of the visual map among those contained in the previously predicted room by means of a pairwise comparison between descriptors obtained from an intermediate layer of the CNN. In this sense, we evaluate the impact of different state-of-the-art CNN models such as ConvNeXt for addressing the proposed localization. Finally, a variety of data augmentation visual effects are separately employed for training the model and their impact is assessed. The performance of the resulting CNNs is evaluated under real operation conditions, including changes in the lighting conditions. Our code is publicly available on the project website https://github.com/juanjo-cabrera/IndoorLocalizationSingleCNN.git
Read more7/16/2024
🤿
0
Applying Deep Neural Networks to automate visual verification of manual bracket installations in aerospace
John Oyekan, Liam Quantrill, Christopher Turner, Ashutosh Tiwari
In this work, we explore a deep learning based automated visual inspection and verification algorithm, based on the Siamese Neural Network architecture. Consideration is also given to how the input pairs of images can affect the performance of the Siamese Neural Network. The Siamese Neural Network was explored alongside Convolutional Neural Networks. In addition to investigating these model architectures, additional methods are explored including transfer learning and ensemble methods, with the aim of improving model performance. We develop a novel voting scheme specific to the Siamese Neural Network which sees a single model vote on multiple reference images. This differs from the typical ensemble approach of multiple models voting on the same data sample. The results obtained show great potential for the use of the Siamese Neural Network for automated visual inspection and verification tasks when there is a scarcity of training data available. The additional methods applied, including the novel similarity voting, are also seen to significantly improve the performance of the model. We apply the publicly available omniglot dataset to validate our approach. According to our knowledge, this is the first time a detailed study of this sort has been carried out in the automatic verification of installed brackets in the aerospace sector via Deep Neural Networks.
Read more9/4/2024