EVD4UAV: An Altitude-Sensitive Benchmark to Evade Vehicle Detection in UAV

0

Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
EVD4UAV: An Altitude-Sensitive Benchmark to Evade Vehicle Detection in UAV
Huiming Sun, Jiacheng Guo, Zibo Meng, Tianyun Zhang, Jianwu Fang, Yuewei Lin, Hongkai Yu
Vehicle detection in Unmanned Aerial Vehicle (UAV) captured images has wide applications in aerial photography and remote sensing. There are many public benchmark datasets proposed for the vehicle detection and tracking in UAV images. Recent studies show that adding an adversarial patch on objects can fool the well-trained deep neural networks based object detectors, posing security concerns to the downstream tasks. However, the current public UAV datasets might ignore the diverse altitudes, vehicle attributes, fine-grained instance-level annotation in mostly side view with blurred vehicle roof, so none of them is good to study the adversarial patch based vehicle detection attack problem. In this paper, we propose a new dataset named EVD4UAV as an altitude-sensitive benchmark to evade vehicle detection in UAV with 6,284 images and 90,886 fine-grained annotated vehicles. The EVD4UAV dataset has diverse altitudes (50m, 70m, 90m), vehicle attributes (color, type), fine-grained annotation (horizontal and rotated bounding boxes, instance-level mask) in top view with clear vehicle roof. One white-box and two black-box patch based attack methods are implemented to attack three classic deep neural networks based object detectors on EVD4UAV. The experimental results show that these representative attack methods could not achieve the robust altitude-insensitive attack performance.
Read more7/24/2024

0
Model Agnostic Defense against Adversarial Patch Attacks on Object Detection in Unmanned Aerial Vehicles
Saurabh Pathak, Samridha Shrestha, Abdelrahman AlMahmoud
Object detection forms a key component in Unmanned Aerial Vehicles (UAVs) for completing high-level tasks that depend on the awareness of objects on the ground from an aerial perspective. In that scenario, adversarial patch attacks on an onboard object detector can severely impair the performance of upstream tasks. This paper proposes a novel model-agnostic defense mechanism against the threat of adversarial patch attacks in the context of UAV-based object detection. We formulate adversarial patch defense as an occlusion removal task. The proposed defense method can neutralize adversarial patches located on objects of interest, without exposure to adversarial patches during training. Our lightweight single-stage defense approach allows us to maintain a model-agnostic nature, that once deployed does not require to be updated in response to changes in the object detection pipeline. The evaluations in digital and physical domains show the feasibility of our method for deployment in UAV object detection pipelines, by significantly decreasing the Attack Success Ratio without incurring significant processing costs. As a result, the proposed defense solution can improve the reliability of object detection for UAVs.
Read more5/30/2024
🔎
0
Environmental Matching Attack Against Unmanned Aerial Vehicles Object Detection
Dehong Kong, Siyuan Liang, Wenqi Ren
Object detection techniques for Unmanned Aerial Vehicles (UAVs) rely on Deep Neural Networks (DNNs), which are vulnerable to adversarial attacks. Nonetheless, adversarial patches generated by existing algorithms in the UAV domain pay very little attention to the naturalness of adversarial patches. Moreover, imposing constraints directly on adversarial patches makes it difficult to generate patches that appear natural to the human eye while ensuring a high attack success rate. We notice that patches are natural looking when their overall color is consistent with the environment. Therefore, we propose a new method named Environmental Matching Attack(EMA) to address the issue of optimizing the adversarial patch under the constraints of color. To the best of our knowledge, this paper is the first to consider natural patches in the domain of UAVs. The EMA method exploits strong prior knowledge of a pretrained stable diffusion to guide the optimization direction of the adversarial patch, where the text guidance can restrict the color of the patch. To better match the environment, the contrast and brightness of the patch are appropriately adjusted. Instead of optimizing the adversarial patch itself, we optimize an adversarial perturbation patch which initializes to zero so that the model can better trade off attacking performance and naturalness. Experiments conducted on the DroneVehicle and Carpk datasets have shown that our work can reach nearly the same attack performance in the digital attack(no greater than 2 in mAP$%$), surpass the baseline method in the physical specific scenarios, and exhibit a significant advantage in terms of naturalness in visualization and color difference with the environment.
Read more5/14/2024
0
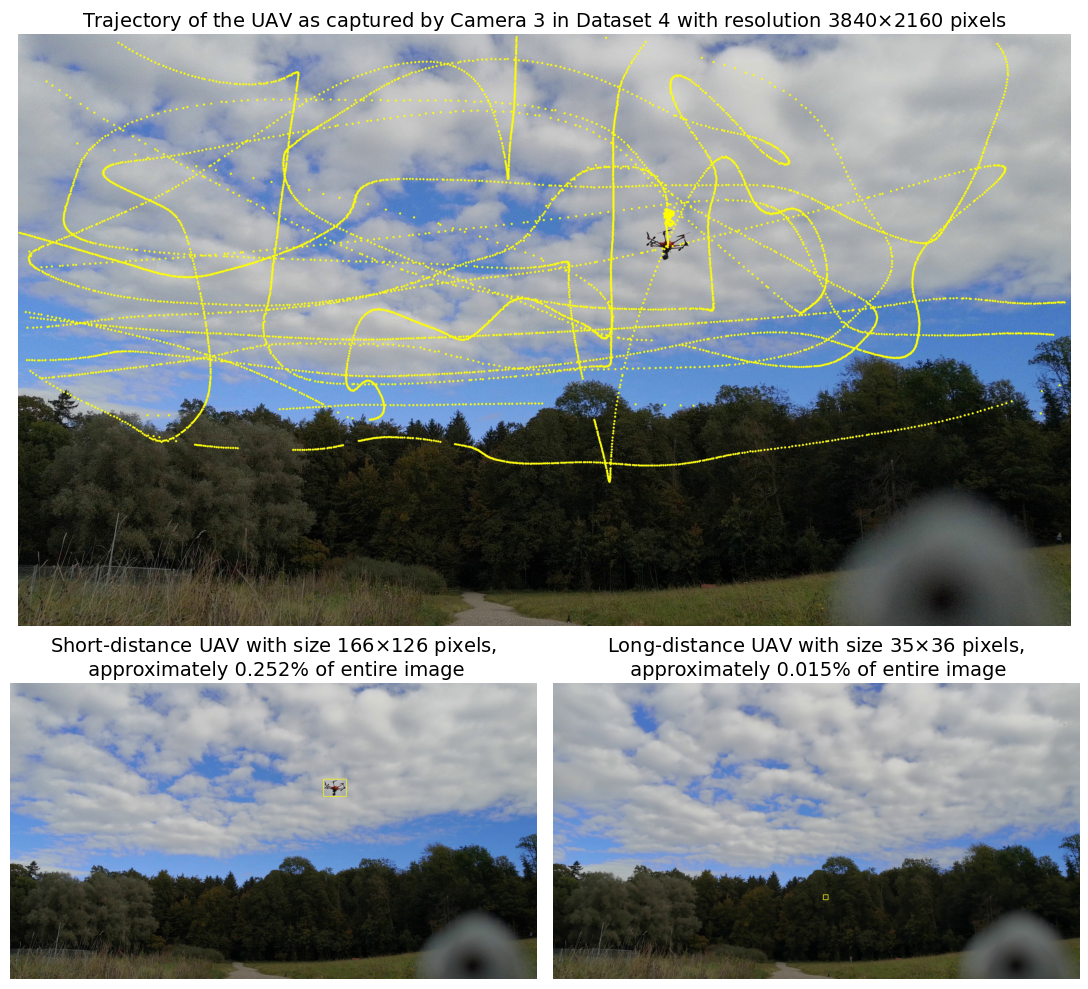
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection
Yu-Hsi Chen
The rapid advancement of drone technology has made accurate Unmanned Aerial Vehicle (UAV) detection essential for surveillance, security, and airspace management. This paper presents a novel trajectory-guided approach, the Patch Intensity Convergence (PIC) technique, which generates high-fidelity bounding boxes for UAV detection without manual labeling. This technique forms the foundation of UAVDB, a dedicated database designed specifically for UAV detection. Unlike datasets that often focus on large UAVs or simple backgrounds, UAVDB utilizes high-resolution RGB video to capture UAVs at various scales, from hundreds of pixels to near-single-digit sizes. This extensive scale variation enables robust evaluation of detection algorithms under diverse conditions. Using the PIC technique, bounding boxes can be efficiently generated from trajectory or position data. We benchmark UAVDB using state-of-the-art (SOTA) YOLO series detectors, providing a comprehensive performance analysis. Our results demonstrate UAVDB's potential as a critical resource for advancing UAV detection, particularly in high-resolution and long-distance tracking scenarios.
Read more9/20/2024