UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection

0
Sign in to get full access
Overview
- The paper presents a novel approach for detecting unmanned aerial vehicles (UAVs) called UAVDB.
- UAVDB uses trajectory-guided adaptable bounding boxes to accurately locate UAVs in images and video.
- The method leverages information about the UAV's movement and trajectory to adjust the bounding boxes dynamically.
- Experiments show UAVDB outperforms existing UAV detection methods.
Plain English Explanation
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection is a new approach for detecting unmanned aerial vehicles (UAVs) in images and video. Traditional object detection methods use fixed-size bounding boxes to locate objects, but this can be challenging for small, fast-moving UAVs.
UAVDB addresses this by using information about the UAV's movement and trajectory to adjust the bounding boxes dynamically. As the UAV moves through the frame, the bounding boxes change shape and size to better fit the vehicle. This allows the system to more accurately locate the UAV compared to methods that use static boxes.
The researchers tested UAVDB on various datasets and found it outperformed existing UAV detection techniques. By leveraging the UAV's trajectory, UAVDB is able to adaptively detect and track these small, agile vehicles more effectively.
Technical Explanation
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection introduces a novel UAV detection method that uses trajectory information to guide the placement and shape of bounding boxes.
The key innovation is the use of a trajectory-guided bounding box adaptation module. This module takes the current frame, the previous bounding box, and the estimated UAV trajectory, and outputs an updated bounding box that better fits the UAV's current position and orientation.
The overall UAVDB pipeline consists of three main components:
- Feature Extraction: A convolutional neural network is used to extract visual features from the input frame.
- Trajectory Estimation: A separate module estimates the UAV's current trajectory based on its movement in previous frames.
- Trajectory-Guided Bounding Box Adaptation: The trajectory information is used to dynamically adjust the bounding box around the UAV.
Experiments show UAVDB outperforms other state-of-the-art UAV detection methods on multiple benchmark datasets. The trajectory-guided bounding box adaptation is a key factor in this improved performance, allowing UAVDB to more accurately locate and track UAVs compared to approaches that use static bounding boxes.
Critical Analysis
The paper presents a well-designed study with thorough experiments demonstrating the effectiveness of the UAVDB approach. However, there are a few potential limitations and areas for further research:
-
Dependence on Trajectory Estimation: UAVDB's performance is heavily dependent on the quality of the trajectory estimation module. If this component produces inaccurate predictions, it could negatively impact the bounding box adaptation and overall detection results.
-
Handling Occlusion and Partial Visibility: The paper does not explicitly address how UAVDB would handle cases where the UAV is partially occluded or only partially visible in the frame. This could be an important consideration for real-world deployment.
-
Computational Efficiency: While the paper reports the runtime of UAVDB, there is no comparison to the computational cost of other UAV detection methods. Understanding the relative efficiency of the approach would be valuable for practical applications.
-
Generalization to Different UAV Types: The experiments focus on a specific set of UAV models and datasets. Further research could explore how well UAVDB generalizes to a wider range of UAV types, sizes, and flight patterns.
Overall, the UAVDB method represents a promising advance in UAV detection technology, but additional research and development may be needed to address these potential limitations and enhance its real-world applicability.
Conclusion
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection introduces a novel approach for accurately detecting and tracking unmanned aerial vehicles (UAVs) in images and video. By leveraging information about the UAV's trajectory, UAVDB can dynamically adjust the bounding boxes around the vehicle, resulting in improved detection performance compared to existing methods.
The key innovation is the trajectory-guided bounding box adaptation module, which allows UAVDB to better fit the bounding boxes to the UAV's current position and orientation. Experiments demonstrate the effectiveness of this approach on multiple UAV detection benchmarks.
While the paper highlights several promising aspects of UAVDB, there are also potential areas for further research, such as improving the trajectory estimation component, handling occlusion and partial visibility, and ensuring computational efficiency. Addressing these challenges could help enhance the real-world applicability of this UAV detection technology.
Overall, the UAVDB method represents an important step forward in the field of UAV detection, with the potential to enable more accurate and robust tracking of these small, fast-moving aerial vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection
Yu-Hsi Chen
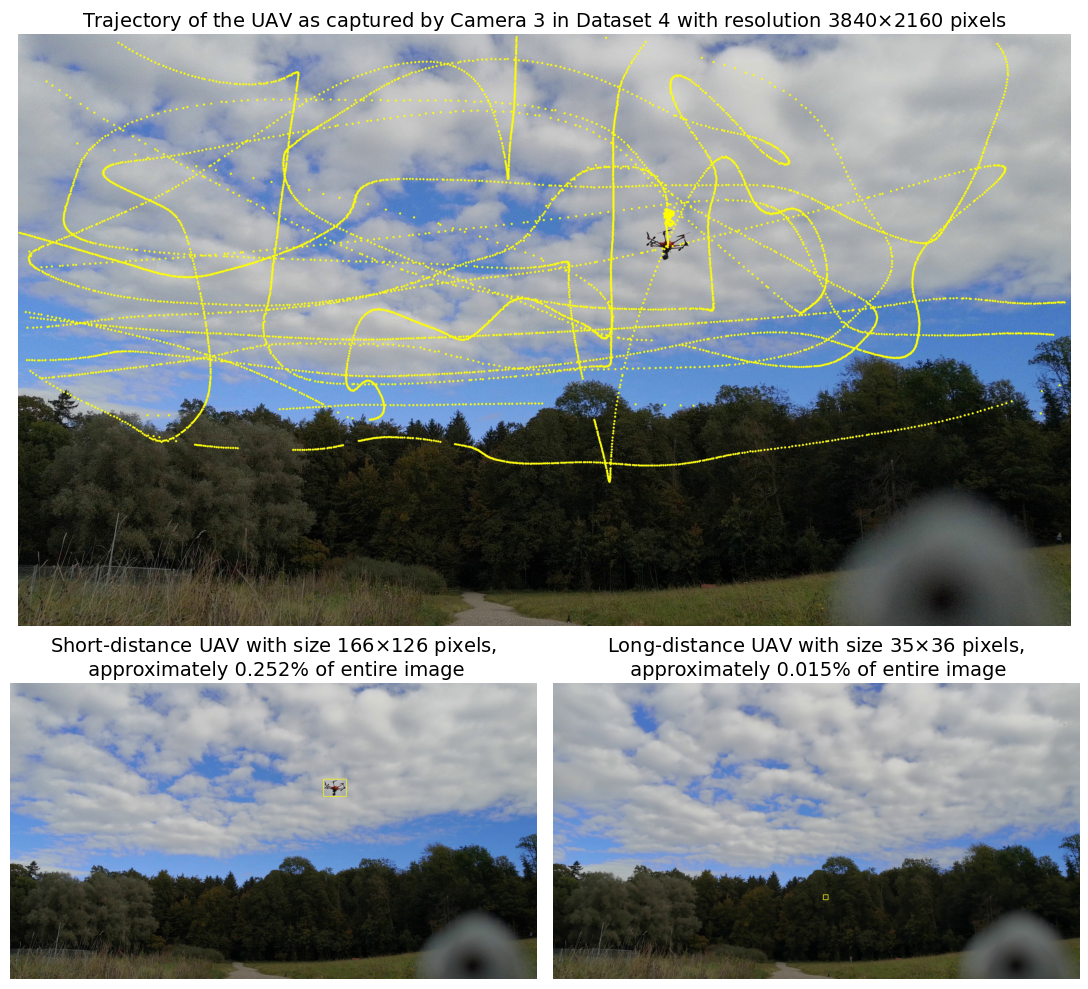
The rapid advancement of drone technology has made accurate Unmanned Aerial Vehicle (UAV) detection essential for surveillance, security, and airspace management. This paper presents a novel trajectory-guided approach, the Patch Intensity Convergence (PIC) technique, which generates high-fidelity bounding boxes for UAV detection without manual labeling. This technique forms the foundation of UAVDB, a dedicated database designed specifically for UAV detection. Unlike datasets that often focus on large UAVs or simple backgrounds, UAVDB utilizes high-resolution RGB video to capture UAVs at various scales, from hundreds of pixels to near-single-digit sizes. This extensive scale variation enables robust evaluation of detection algorithms under diverse conditions. Using the PIC technique, bounding boxes can be efficiently generated from trajectory or position data. We benchmark UAVDB using state-of-the-art (SOTA) YOLO series detectors, providing a comprehensive performance analysis. Our results demonstrate UAVDB's potential as a critical resource for advancing UAV detection, particularly in high-resolution and long-distance tracking scenarios.
Read more9/20/2024

0
EVD4UAV: An Altitude-Sensitive Benchmark to Evade Vehicle Detection in UAV
Huiming Sun, Jiacheng Guo, Zibo Meng, Tianyun Zhang, Jianwu Fang, Yuewei Lin, Hongkai Yu
Vehicle detection in Unmanned Aerial Vehicle (UAV) captured images has wide applications in aerial photography and remote sensing. There are many public benchmark datasets proposed for the vehicle detection and tracking in UAV images. Recent studies show that adding an adversarial patch on objects can fool the well-trained deep neural networks based object detectors, posing security concerns to the downstream tasks. However, the current public UAV datasets might ignore the diverse altitudes, vehicle attributes, fine-grained instance-level annotation in mostly side view with blurred vehicle roof, so none of them is good to study the adversarial patch based vehicle detection attack problem. In this paper, we propose a new dataset named EVD4UAV as an altitude-sensitive benchmark to evade vehicle detection in UAV with 6,284 images and 90,886 fine-grained annotated vehicles. The EVD4UAV dataset has diverse altitudes (50m, 70m, 90m), vehicle attributes (color, type), fine-grained annotation (horizontal and rotated bounding boxes, instance-level mask) in top view with clear vehicle roof. One white-box and two black-box patch based attack methods are implemented to attack three classic deep neural networks based object detectors on EVD4UAV. The experimental results show that these representative attack methods could not achieve the robust altitude-insensitive attack performance.
Read more7/24/2024

0
Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
Read more5/28/2024

0
UAV (Unmanned Aerial Vehicles): Diverse Applications of UAV Datasets in Segmentation, Classification, Detection, and Tracking
Md. Mahfuzur Rahman, Sunzida Siddique, Marufa Kamal, Rakib Hossain Rifat, Kishor Datta Gupta
Unmanned Aerial Vehicles (UAVs), have greatly revolutionized the process of gathering and analyzing data in diverse research domains, providing unmatched adaptability and effectiveness. This paper presents a thorough examination of Unmanned Aerial Vehicle (UAV) datasets, emphasizing their wide range of applications and progress. UAV datasets consist of various types of data, such as satellite imagery, images captured by drones, and videos. These datasets can be categorized as either unimodal or multimodal, offering a wide range of detailed and comprehensive information. These datasets play a crucial role in disaster damage assessment, aerial surveillance, object recognition, and tracking. They facilitate the development of sophisticated models for tasks like semantic segmentation, pose estimation, vehicle re-identification, and gesture recognition. By leveraging UAV datasets, researchers can significantly enhance the capabilities of computer vision models, thereby advancing technology and improving our understanding of complex, dynamic environments from an aerial perspective. This review aims to encapsulate the multifaceted utility of UAV datasets, emphasizing their pivotal role in driving innovation and practical applications in multiple domains.
Read more9/6/2024