EventZoom: A Progressive Approach to Event-Based Data Augmentation for Enhanced Neuromorphic Vision

0
Sign in to get full access
Overview
- The paper introduces "EventZoom," a novel event-based data augmentation technique for enhanced neuromorphic vision.
- EventZoom progressively applies transformations to event-based data, aiming to improve the performance of neuromorphic vision models.
- The research explores the impact of EventZoom on various neuromorphic vision tasks, including object recognition, segmentation, and tracking.
Plain English Explanation
Event-based cameras, also known as neuromorphic cameras, are a type of visual sensor that capture changes in brightness rather than traditional video frames. These cameras can provide high temporal resolution and low power consumption, making them attractive for applications like robotics and autonomous vehicles.
However, one challenge in using event-based data is the limited availability of labeled datasets for training machine learning models. The provided paper introduces EventZoom, a technique to "augment" or artificially expand the available event-based data. EventZoom applies a series of transformations, such as scaling and rotation, to the event-based data in a progressive manner, creating new, diverse samples for training.
The key idea is that by progressively applying these transformations, the model can learn more robust and generalizable features from the event-based data, leading to improved performance on various neuromorphic vision tasks. This approach builds on previous work in event-based vision and data augmentation techniques.
The researchers evaluate the effectiveness of EventZoom on tasks like object recognition, segmentation, and tracking using several neuromorphic vision datasets. The results show that EventZoom can significantly boost the performance of neuromorphic vision models, particularly in scenarios with limited training data.
Technical Explanation
The paper introduces a novel event-based data augmentation technique called "EventZoom." The key idea is to progressively apply a series of transformations to event-based data, such as scaling, rotation, and jittering, to create new, diverse samples for training neuromorphic vision models.
The EventZoom algorithm starts with the original event-based data and applies a set of transformations, gradually increasing the intensity of these transformations in subsequent iterations. This progressive approach aims to help the model learn more robust and generalizable features from the augmented data, leading to improved performance on various neuromorphic vision tasks.
The researchers evaluate the effectiveness of EventZoom on several neuromorphic vision datasets, including object recognition, segmentation, and tracking tasks. The results demonstrate that EventZoom can significantly boost the performance of neuromorphic vision models, especially in scenarios with limited training data.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the EventZoom technique, but there are a few potential limitations and areas for further research:
-
Computational Overhead: The progressive nature of EventZoom may introduce additional computational overhead during training, which could be a concern for real-time or resource-constrained applications.
-
Generalization to Other Tasks: While the paper showcases the effectiveness of EventZoom on several neuromorphic vision tasks, it would be valuable to explore its applicability to a wider range of tasks, such as microsaccade-inspired event-based robotics, to further validate its generalization capabilities.
-
Interpretability: The paper does not delve into the interpretability of the learned features from the EventZoom-augmented data. Investigating the explainability of the model's performance improvements could provide additional insights and guide future research.
Overall, the EventZoom approach presents a promising direction for enhancing the performance of neuromorphic vision models, particularly in data-limited scenarios. Further research on the computational efficiency, generalization, and interpretability of the technique could lead to valuable advancements in the field of event-based computer vision.
Conclusion
The paper introduces "EventZoom," a novel event-based data augmentation technique that progressively applies transformations to event-based data to improve the performance of neuromorphic vision models. The results demonstrate that EventZoom can significantly boost the performance of models on tasks such as object recognition, segmentation, and tracking, especially in scenarios with limited training data.
The progressive and diverse nature of the EventZoom transformations allows neuromorphic vision models to learn more robust and generalizable features, leading to improved performance across a range of tasks. While the paper highlights the effectiveness of EventZoom, further research on computational efficiency, generalization, and interpretability could lead to valuable advancements in the field of event-based computer vision and its real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
EventZoom: A Progressive Approach to Event-Based Data Augmentation for Enhanced Neuromorphic Vision
Yiting Dong, Xiang He, Guobin Shen, Dongcheng Zhao, Yang Li, Yi Zeng
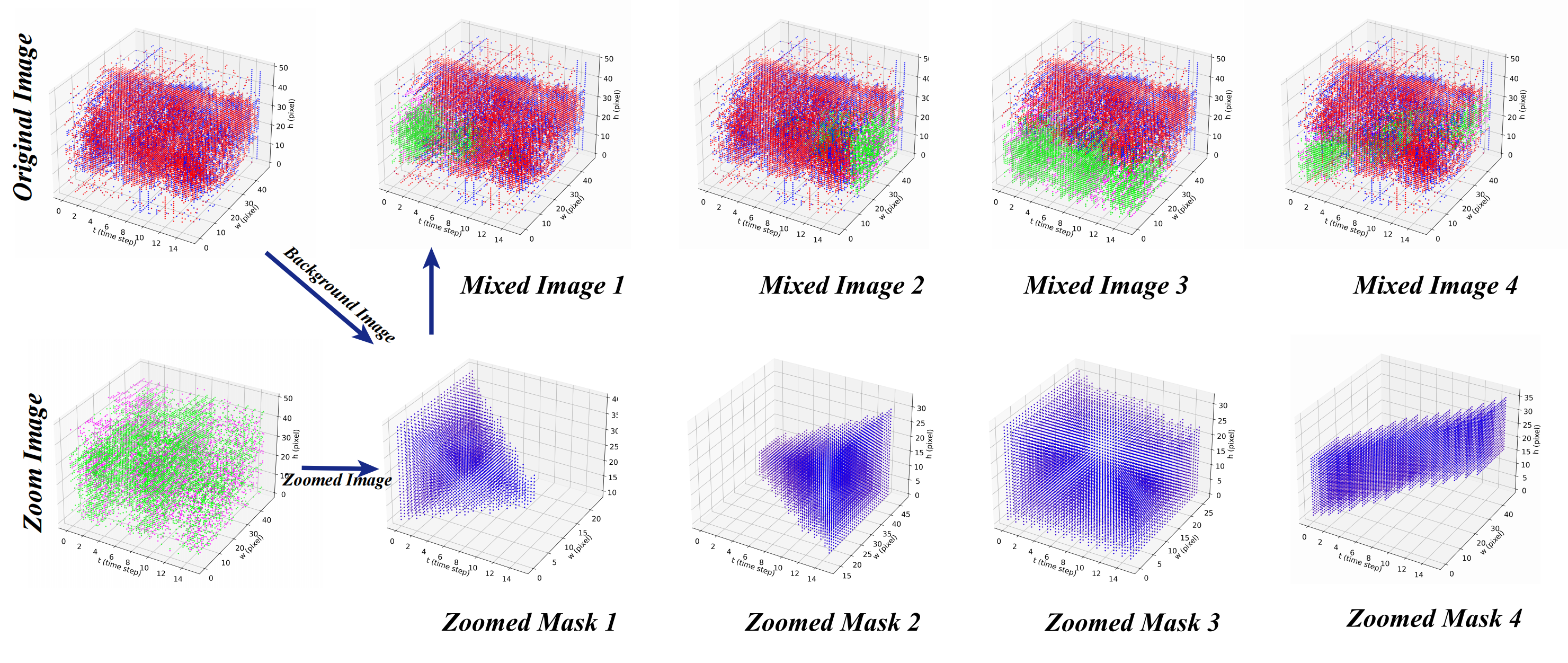
Dynamic Vision Sensors (DVS) capture event data with high temporal resolution and low power consumption, presenting a more efficient solution for visual processing in dynamic and real-time scenarios compared to conventional video capture methods. Event data augmentation serve as an essential method for overcoming the limitation of scale and diversity in event datasets. Our comparative experiments demonstrate that the two factors, spatial integrity and temporal continuity, can significantly affect the capacity of event data augmentation, which are guarantee for maintaining the sparsity and high dynamic range characteristics unique to event data. However, existing augmentation methods often neglect the preservation of spatial integrity and temporal continuity. To address this, we developed a novel event data augmentation strategy EventZoom, which employs a temporal progressive strategy, embedding transformed samples into the original samples through progressive scaling and shifting. The scaling process avoids the spatial information loss associated with cropping, while the progressive strategy prevents interruptions or abrupt changes in temporal information. We validated EventZoom across various supervised learning frameworks. The experimental results show that EventZoom consistently outperforms existing event data augmentation methods with SOTA performance. For the first time, we have concurrently employed Semi-supervised and Unsupervised learning to verify feasibility on event augmentation algorithms, demonstrating the applicability and effectiveness of EventZoom as a powerful event-based data augmentation tool in handling real-world scenes with high dynamics and variability environments.
Read more9/10/2024

0
EventAug: Multifaceted Spatio-Temporal Data Augmentation Methods for Event-based Learning
Yukun Tian, Hao Chen, Yongjian Deng, Feihong Shen, Kepan Liu, Wei You, Ziyang Zhang
The event camera has demonstrated significant success across a wide range of areas due to its low time latency and high dynamic range. However, the community faces challenges such as data deficiency and limited diversity, often resulting in over-fitting and inadequate feature learning. Notably, the exploration of data augmentation techniques in the event community remains scarce. This work aims to address this gap by introducing a systematic augmentation scheme named EventAug to enrich spatial-temporal diversity. In particular, we first propose Multi-scale Temporal Integration (MSTI) to diversify the motion speed of objects, then introduce Spatial-salient Event Mask (SSEM) and Temporal-salient Event Mask (TSEM) to enrich object variants. Our EventAug can facilitate models learning with richer motion patterns, object variants and local spatio-temporal relations, thus improving model robustness to varied moving speeds, occlusions, and action disruptions. Experiment results show that our augmentation method consistently yields significant improvements across different tasks and backbones (e.g., a 4.87% accuracy gain on DVS128 Gesture). Our code will be publicly available for this community.
Read more9/19/2024
🧪
0
V2CE: Video to Continuous Events Simulator
Zhongyang Zhang, Shuyang Cui, Kaidong Chai, Haowen Yu, Subhasis Dasgupta, Upal Mahbub, Tauhidur Rahman
Dynamic Vision Sensor (DVS)-based solutions have recently garnered significant interest across various computer vision tasks, offering notable benefits in terms of dynamic range, temporal resolution, and inference speed. However, as a relatively nascent vision sensor compared to Active Pixel Sensor (APS) devices such as RGB cameras, DVS suffers from a dearth of ample labeled datasets. Prior efforts to convert APS data into events often grapple with issues such as a considerable domain shift from real events, the absence of quantified validation, and layering problems within the time axis. In this paper, we present a novel method for video-to-events stream conversion from multiple perspectives, considering the specific characteristics of DVS. A series of carefully designed losses helps enhance the quality of generated event voxels significantly. We also propose a novel local dynamic-aware timestamp inference strategy to accurately recover event timestamps from event voxels in a continuous fashion and eliminate the temporal layering problem. Results from rigorous validation through quantified metrics at all stages of the pipeline establish our method unquestionably as the current state-of-the-art (SOTA).
Read more4/30/2024

0
Evaluating Image-Based Face and Eye Tracking with Event Cameras
Khadija Iddrisu, Waseem Shariff, Noel E. OConnor, Joseph Lemley, Suzanne Little
Event Cameras, also known as Neuromorphic sensors, capture changes in local light intensity at the pixel level, producing asynchronously generated data termed ``events''. This distinct data format mitigates common issues observed in conventional cameras, like under-sampling when capturing fast-moving objects, thereby preserving critical information that might otherwise be lost. However, leveraging this data often necessitates the development of specialized, handcrafted event representations that can integrate seamlessly with conventional Convolutional Neural Networks (CNNs), considering the unique attributes of event data. In this study, We evaluate event-based Face and Eye tracking. The core objective of our study is to showcase the viability of integrating conventional algorithms with event-based data, transformed into a frame format while preserving the unique benefits of event cameras. To validate our approach, we constructed a frame-based event dataset by simulating events between RGB frames derived from the publicly accessible Helen Dataset. We assess its utility for face and eye detection tasks through the application of GR-YOLO -- a pioneering technique derived from YOLOv3. This evaluation includes a comparative analysis with results derived from training the dataset with YOLOv8. Subsequently, the trained models were tested on real event streams from various iterations of Prophesee's event cameras and further evaluated on the Faces in Event Stream (FES) benchmark dataset. The models trained on our dataset shows a good prediction performance across all the datasets obtained for validation with the best results of a mean Average precision score of 0.91. Additionally, The models trained demonstrated robust performance on real event camera data under varying light conditions.
Read more8/21/2024