An evidential time-to-event prediction model based on Gaussian random fuzzy numbers

0

Sign in to get full access
Overview
- This paper presents an evidential time-to-event prediction model based on Gaussian random fuzzy numbers.
- The model combines concepts from survival analysis, belief functions, and Dempster-Shafer theory to handle uncertainty in time-to-event predictions.
- The approach aims to provide more informative predictions compared to traditional survival analysis methods by capturing different types of uncertainty.
Plain English Explanation
This research proposes a new way to predict when an event, such as a machine failure or a patient's disease progression, might happen. The traditional approach is to use survival analysis, which provides a probability of an event occurring at a certain time. However, this method doesn't fully capture the different types of uncertainty involved.
The researchers in this paper have developed a model that combines survival analysis with concepts from belief functions and fuzzy set theory. Belief functions are a way to represent and reason about uncertain information, while fuzzy sets allow for the modeling of imprecise or vague data.
By integrating these different ideas, the model can provide more nuanced and informative predictions about the timing of future events. For example, it can express how certain or uncertain the prediction is, or indicate a range of possible event times rather than a single point estimate.
This approach could be particularly useful in applications where there is a lot of variability or incomplete information, such as predicting the remaining useful life of a machine or forecasting the progression of a disease. By accounting for different types of uncertainty, the model may provide more reliable and actionable predictions to support decision-making.
Technical Explanation
The proposed model builds on the framework of survival analysis, which is commonly used to predict the time-to-occurrence of an event. However, traditional survival analysis methods often make strong assumptions about the underlying probability distributions, which may not always hold in practice.
To address this, the researchers introduce the concept of Gaussian random fuzzy numbers to represent the time-to-event variable. This allows for the modeling of both aleatory uncertainty (inherent variability) and epistemic uncertainty (lack of knowledge) in the prediction. The fuzzy numbers are used to encode the belief that the event will occur within a certain time range, rather than at a single point in time.
The model then leverages the Dempster-Shafer theory of evidence to combine the fuzzy time-to-event predictions with other available evidence, such as covariate information or expert knowledge. This results in an evidential time-to-event prediction that can express different levels of belief or confidence in the possible event times.
The researchers demonstrate the effectiveness of their approach through experiments on both simulated and real-world datasets, showing that it can outperform traditional survival analysis methods in terms of predictive accuracy and the richness of the output information.
Critical Analysis
The proposed model provides a novel and promising approach to time-to-event prediction by incorporating various sources of uncertainty. The authors have demonstrated its potential advantages over standard survival analysis techniques, particularly in situations with complex or incomplete information.
However, the paper does not provide a detailed discussion of the limitations or potential drawbacks of the method. For example, the computational complexity of the Dempster-Shafer evidence combination process may be a concern, especially for large-scale problems. Additionally, the choice of the Gaussian random fuzzy number representation may not be suitable for all types of time-to-event data, and the sensitivity of the model to the selection of this representation could be further explored.
Further research could also investigate the model's performance in handling censored data or its robustness to violations of the underlying assumptions. Comparative studies with other uncertainty-aware prediction methods, such as distribution-free predictive inference, could also provide valuable insights.
Conclusion
This paper introduces an innovative evidential time-to-event prediction model that combines survival analysis, belief functions, and fuzzy set theory to capture different sources of uncertainty. By providing more informative and nuanced predictions, the proposed approach has the potential to improve decision-making in a wide range of applications, from equipment maintenance to healthcare. While the research shows promising results, further investigation of the method's limitations and comparative performance is warranted to fully understand its strengths and weaknesses.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An evidential time-to-event prediction model based on Gaussian random fuzzy numbers
Ling Huang, Yucheng Xing, Thierry Denoeux, Mengling Feng
We introduce an evidential model for time-to-event prediction with censored data. In this model, uncertainty on event time is quantified by Gaussian random fuzzy numbers, a newly introduced family of random fuzzy subsets of the real line with associated belief functions, generalizing both Gaussian random variables and Gaussian possibility distributions. Our approach makes minimal assumptions about the underlying time-to-event distribution. The model is fit by minimizing a generalized negative log-likelihood function that accounts for both normal and censored data. Comparative experiments on two real-world datasets demonstrate the very good performance of our model as compared to the state-of-the-art.
Read more6/21/2024
0
A probabilistic estimation of remaining useful life from censored time-to-event data
Christian Marius Lillelund, Fernando Pannullo, Morten Opprud Jakobsen, Manuel Morante, Christian Fischer Pedersen
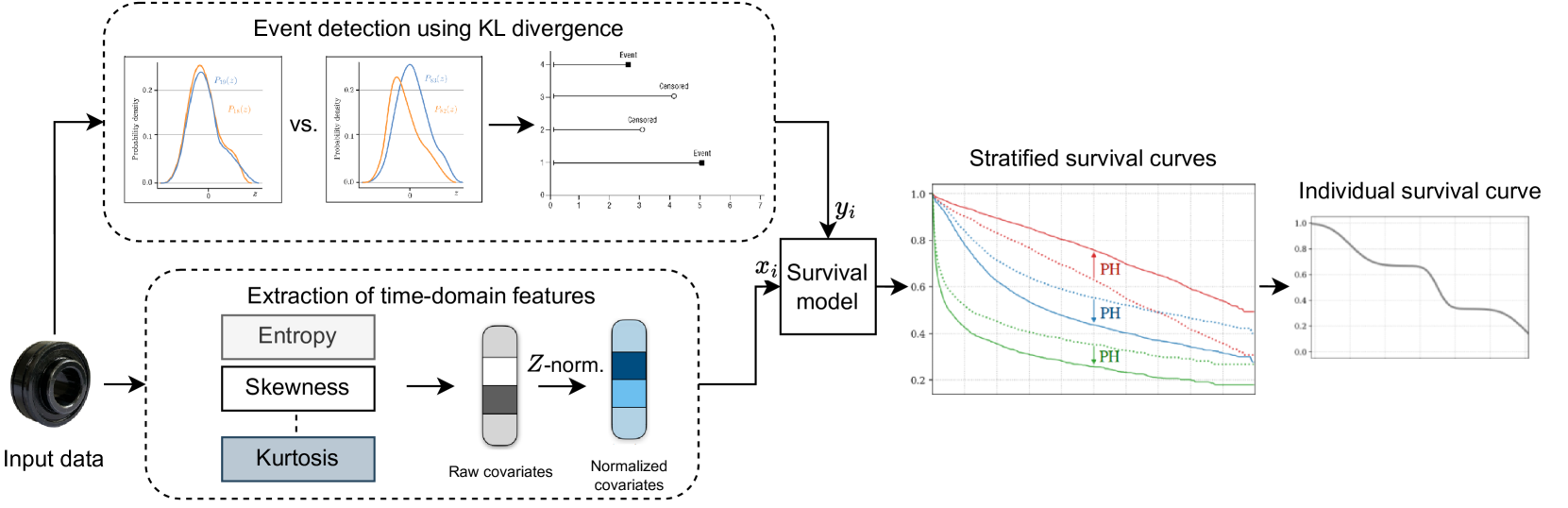
Predicting the remaining useful life (RUL) of ball bearings plays an important role in predictive maintenance. A common definition of the RUL is the time until a bearing is no longer functional, which we denote as an event, and many data-driven methods have been proposed to predict the RUL. However, few studies have addressed the problem of censored data, where this event of interest is not observed, and simply ignoring these observations can lead to an overestimation of the failure risk. In this paper, we propose a probabilistic estimation of RUL using survival analysis that supports censored data. First, we analyze sensor readings from ball bearings in the frequency domain and annotate when a bearing starts to deteriorate by calculating the Kullback-Leibler (KL) divergence between the probability density function (PDF) of the current process and a reference PDF. Second, we train several survival models on the annotated bearing dataset, capable of predicting the RUL over a finite time horizon using the survival function. This function is guaranteed to be strictly monotonically decreasing and is an intuitive estimation of the remaining lifetime. We demonstrate our approach in the XJTU-SY dataset using cross-validation and find that Random Survival Forests consistently outperforms both non-neural networks and neural networks in terms of the mean absolute error (MAE). Our work encourages the inclusion of censored data in predictive maintenance models and highlights the unique advantages that survival analysis offers when it comes to probabilistic RUL estimation and early fault detection.
Read more5/6/2024
👨🏫
0
Reasoning with fuzzy and uncertain evidence using epistemic random fuzzy sets: general framework and practical models
Thierry Denoeux
We introduce a general theory of epistemic random fuzzy sets for reasoning with fuzzy or crisp evidence. This framework generalizes both the Dempster-Shafer theory of belief functions, and possibility theory. Independent epistemic random fuzzy sets are combined by the generalized product-intersection rule, which extends both Dempster's rule for combining belief functions, and the product conjunctive combination of possibility distributions. We introduce Gaussian random fuzzy numbers and their multi-dimensional extensions, Gaussian random fuzzy vectors, as practical models for quantifying uncertainty about scalar or vector quantities. Closed-form expressions for the combination, projection and vacuous extension of Gaussian random fuzzy numbers and vectors are derived.
Read more5/8/2024

0
Event prediction and causality inference despite incomplete information
Harrison Lam, Yuanjie Chen, Noboru Kanazawa, Mohammad Chowdhury, Anna Battista, Stephan Waldert
We explored the challenge of predicting and explaining the occurrence of events within sequences of data points. Our focus was particularly on scenarios in which unknown triggers causing the occurrence of events may consist of non-consecutive, masked, noisy data points. This scenario is akin to an agent tasked with learning to predict and explain the occurrence of events without understanding the underlying processes or having access to crucial information. Such scenarios are encountered across various fields, such as genomics, hardware and software verification, and financial time series prediction. We combined analytical, simulation, and machine learning (ML) approaches to investigate, quantify, and provide solutions to this challenge. We deduced and validated equations generally applicable to any variation of the underlying challenge. Using these equations, we (1) described how the level of complexity changes with various parameters (e.g., number of apparent and hidden states, trigger length, confidence, etc.) and (2) quantified the data needed to successfully train an ML model. We then (3) proved our ML solution learns and subsequently identifies unknown triggers and predicts the occurrence of events. If the complexity of the challenge is too high, our ML solution can identify trigger candidates to be used to interactively probe the system under investigation to determine the true trigger in a way considerably more efficient than brute force methods. By sharing our findings, we aim to assist others grappling with similar challenges, enabling estimates on the complexity of their problem, the data required and a solution to solve it.
Read more6/11/2024