eWand: A calibration framework for wide baseline frame-based and event-based camera systems

0
👨🏫
Sign in to get full access
Overview
- Accurately calibrating multiple cameras is crucial for precisely tracking objects, but it's a time-consuming process that needs to be repeated every time the cameras move.
- The standard approach uses a printed pattern with known geometry to estimate the camera parameters, but this has limitations for multi-camera setups with different viewpoints.
- The paper proposes a new method called eWand that uses blinking LEDs inside opaque spheres instead of a printed pattern, providing faster and easier extrinsic calibration for both frame-based and event-based cameras.
Plain English Explanation
Imagine you have multiple cameras set up to track the movements of a ball or other object. In order for the cameras to work together accurately, they need to be precisely calibrated - this means figuring out the exact position, orientation, and other technical details about each camera.
The standard way to do this calibration is by using a printed pattern, like a checkerboard, with known measurements. The cameras look at this pattern and can use the known geometry to calculate their own parameters. However, this process is quite time-consuming, and it has to be repeated every time the cameras are moved or adjusted.
The researchers in this paper came up with a better way to do the calibration. Instead of a printed pattern, they use small spheres with blinking LED lights inside. These spheres can be quickly placed around the space being monitored, and the cameras can detect the blinking lights to figure out how they're positioned relative to each other.
This new "eWand" method is faster, easier to set up, and works well for both traditional frame-based cameras and the newer event-based cameras. It allows the multi-camera system to be accurately calibrated without all the hassle of the standard printed pattern approach.
Technical Explanation
The paper proposes a new method called eWand for calibrating the extrinsic parameters (position and orientation) of multiple cameras, both frame-based and event-based. The key innovation is using blinking LEDs inside opaque spheres instead of a printed or displayed pattern.
Traditionally, camera calibration relies on detecting a known 2D pattern like a checkerboard. While effective for intrinsic calibration (internal camera properties), this has limitations for extrinsic calibration across multiple cameras with very different viewpoints. The 2D pattern can only be seen from one direction and needs to be large to be detected at a distance.
In contrast, the eWand approach uses small, portable spheres with blinking LEDs inside. These can be easily placed around the capture volume and detected by all the cameras, even with large baselines and varying viewpoints. The blinking pattern allows the system to quickly identify corresponding points across cameras to estimate the extrinsic parameters.
The paper demonstrates that eWand can provide accurate extrinsic calibration for both frame-based and event-based camera setups. Compared to the standard checkerboard method, eWand is faster, more flexible, and easier to deploy, while maintaining high calibration quality.
Critical Analysis
The eWand method presented in this paper offers a compelling solution to the limitations of traditional camera calibration approaches, particularly for multi-camera setups with diverse viewpoints. By leveraging blinking LED spheres instead of 2D patterns, the technique enables faster, more flexible extrinsic calibration.
However, the paper does not address some potential practical concerns. For example, the reliance on opaque spheres means the system may be sensitive to occlusions in the capture volume. Additionally, the complexity and cost of the custom LED sphere hardware could be a barrier for some applications.
Further research could explore ways to make the eWand calibration even more automated and robust. Investigating calibration methods that can handle partial occlusions or dynamic scene changes would also enhance the real-world applicability of this approach.
Overall, the eWand technique represents an innovative step forward in camera calibration, particularly for multi-camera setups. With continued refinement and expanded testing, it could become a valuable tool for a range of computer vision and motion tracking applications.
Conclusion
This paper presents a novel camera calibration method called eWand that addresses the limitations of traditional approaches, especially for multi-camera systems with diverse viewpoints. By using blinking LED spheres instead of 2D patterns, eWand enables faster, more flexible extrinsic calibration that works well for both frame-based and event-based cameras.
The eWand technique offers an elegant solution to a common challenge in computer vision and motion tracking systems. While some practical considerations remain, the core innovation represents an exciting advancement that could lead to more accurate and easier-to-deploy multi-camera setups across a variety of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👨🏫
0
eWand: A calibration framework for wide baseline frame-based and event-based camera systems
Thomas Gossard, Andreas Ziegler, Levin Kolmar, Jonas Tebbe, Andreas Zell
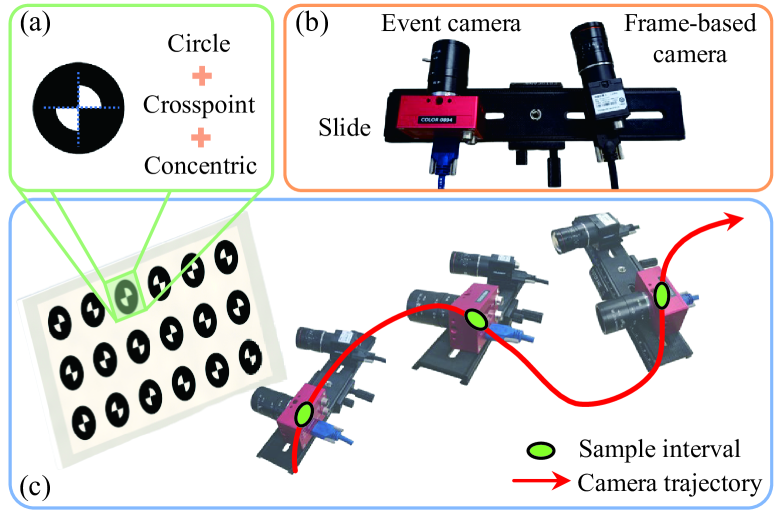
Accurate calibration is crucial for using multiple cameras to triangulate the position of objects precisely. However, it is also a time-consuming process that needs to be repeated for every displacement of the cameras. The standard approach is to use a printed pattern with known geometry to estimate the intrinsic and extrinsic parameters of the cameras. The same idea can be applied to event-based cameras, though it requires extra work. By using frame reconstruction from events, a printed pattern can be detected. A blinking pattern can also be displayed on a screen. Then, the pattern can be directly detected from the events. Such calibration methods can provide accurate intrinsic calibration for both frame- and event-based cameras. However, using 2D patterns has several limitations for multi-camera extrinsic calibration, with cameras possessing highly different points of view and a wide baseline. The 2D pattern can only be detected from one direction and needs to be of significant size to compensate for its distance to the camera. This makes the extrinsic calibration time-consuming and cumbersome. To overcome these limitations, we propose eWand, a new method that uses blinking LEDs inside opaque spheres instead of a printed or displayed pattern. Our method provides a faster, easier-to-use extrinsic calibration approach that maintains high accuracy for both event- and frame-based cameras.
Read more4/4/2024
0
EF-Calib: Spatiotemporal Calibration of Event- and Frame-Based Cameras Using Continuous-Time Trajectories
Shaoan Wang, Zhanhua Xin, Yaoqing Hu, Dongyue Li, Mingzhu Zhu, Junzhi Yu
Event camera, a bio-inspired asynchronous triggered camera, offers promising prospects for fusion with frame-based cameras owing to its low latency and high dynamic range. However, calibrating stereo vision systems that incorporate both event and frame-based cameras remains a significant challenge. In this letter, we present EF-Calib, a spatiotemporal calibration framework for event- and frame-based cameras using continuous-time trajectories. A novel calibration pattern applicable to both camera types and the corresponding event recognition algorithm is proposed. Leveraging the asynchronous nature of events, a derivable piece-wise B-spline to represent camera pose continuously is introduced, enabling calibration for intrinsic parameters, extrinsic parameters, and time offset, with analytical Jacobians provided. Various experiments are carried out to evaluate the calibration performance of EF-Calib, including calibration experiments for intrinsic parameters, extrinsic parameters, and time offset. Experimental results show that EF-Calib achieves the most accurate intrinsic parameters compared to current SOTA, the close accuracy of the extrinsic parameters compared to the frame-based results, and accurate time offset estimation. EF-Calib provides a convenient and accurate toolbox for calibrating the system that fuses events and frames. The code of this paper will also be open-sourced at: https://github.com/wsakobe/EF-Calib.
Read more5/28/2024
🌀
0
Single-image camera calibration with model-free distortion correction
Katia Genovese
Camera calibration is a process of paramount importance in computer vision applications that require accurate quantitative measurements. The popular method developed by Zhang relies on the use of a large number of images of a planar grid of fiducial points captured in multiple poses. Although flexible and easy to implement, Zhang's method has some limitations. The simultaneous optimization of the entire parameter set, including the coefficients of a predefined distortion model, may result in poor distortion correction at the image boundaries or in miscalculation of the intrinsic parameters, even with a reasonably small reprojection error. Indeed, applications involving image stitching (e.g. multi-camera systems) require accurate mapping of distortion up to the outermost regions of the image. Moreover, intrinsic parameters affect the accuracy of camera pose estimation, which is fundamental for applications such as vision servoing in robot navigation and automated assembly. This paper proposes a method for estimating the complete set of calibration parameters from a single image of a planar speckle pattern covering the entire sensor. The correspondence between image points and physical points on the calibration target is obtained using Digital Image Correlation. The effective focal length and the extrinsic parameters are calculated separately after a prior evaluation of the principal point. At the end of the procedure, a dense and uniform model-free distortion map is obtained over the entire image. Synthetic data with different noise levels were used to test the feasibility of the proposed method and to compare its metrological performance with Zhang's method. Real-world tests demonstrate the potential of the developed method to reveal aspects of the image formation that are hidden by averaging over multiple images.
Read more6/26/2024

0
Microsaccade-inspired Event Camera for Robotics
Botao He, Ze Wang, Yuan Zhou, Jingxi Chen, Chahat Deep Singh, Haojia Li, Yuman Gao, Shaojie Shen, Kaiwei Wang, Yanjun Cao, Chao Xu, Yiannis Aloimonos, Fei Gao, Cornelia Fermuller
Neuromorphic vision sensors or event cameras have made the visual perception of extremely low reaction time possible, opening new avenues for high-dynamic robotics applications. These event cameras' output is dependent on both motion and texture. However, the event camera fails to capture object edges that are parallel to the camera motion. This is a problem intrinsic to the sensor and therefore challenging to solve algorithmically. Human vision deals with perceptual fading using the active mechanism of small involuntary eye movements, the most prominent ones called microsaccades. By moving the eyes constantly and slightly during fixation, microsaccades can substantially maintain texture stability and persistence. Inspired by microsaccades, we designed an event-based perception system capable of simultaneously maintaining low reaction time and stable texture. In this design, a rotating wedge prism was mounted in front of the aperture of an event camera to redirect light and trigger events. The geometrical optics of the rotating wedge prism allows for algorithmic compensation of the additional rotational motion, resulting in a stable texture appearance and high informational output independent of external motion. The hardware device and software solution are integrated into a system, which we call Artificial MIcrosaccade-enhanced EVent camera (AMI-EV). Benchmark comparisons validate the superior data quality of AMI-EV recordings in scenarios where both standard cameras and event cameras fail to deliver. Various real-world experiments demonstrate the potential of the system to facilitate robotics perception both for low-level and high-level vision tasks.
Read more5/29/2024