EF-Calib: Spatiotemporal Calibration of Event- and Frame-Based Cameras Using Continuous-Time Trajectories

0
Sign in to get full access
Overview
• This paper proposes a method called EF-Calib for spatiotemporal calibration of event-based and frame-based cameras using continuous-time trajectories.
• The method jointly estimates the spatial and temporal parameters between the two camera types, enabling applications like robust visual odometry and 3D reconstruction.
• EF-Calib uses a continuous-time representation of the camera trajectory, which provides more accurate alignment between the event and frame data compared to discrete-time approaches.
Plain English Explanation
Event-based cameras and traditional frame-based cameras have complementary strengths - event cameras are fast and robust to motion blur, while frame-based cameras provide dense visual information. Cascalib: Cascaded Calibration for Motion Capture from Sparse Data and Event-Based Structure from Orbit have explored ways to combine these two types of cameras.
To effectively fuse the data from both camera types, the spatial and temporal offsets between them need to be precisely calibrated. EF-Calib addresses this by modeling the camera trajectories as continuous-time functions rather than discrete samples. This allows better alignment of the event and frame data, leading to more accurate calibration.
The key innovation is representing the camera motion as a smooth curve over time, rather than a series of individual positions. This continuous-time model captures subtle movements that would be missed by traditional discrete-time approaches like IMU-Aided Event-based Stereo Visual Odometry or EVI-SAM: Robust Real-Time Tightly-Coupled. The method can also estimate the time offset between the event and frame data, further improving the calibration.
Technical Explanation
EF-Calib models the 6D camera trajectory as a continuous-time function represented by B-splines. This allows the method to capture smooth, nonlinear motion more accurately than discrete-time approaches. The spatial calibration between the event and frame cameras is represented by a 3D rotation and translation, while the temporal calibration is a single time offset parameter.
The method optimizes these spatial and temporal parameters by minimizing the reprojection error between observed 3D points and their projections in both the event and frame data. A novel joint likelihood function is used that accounts for both the event and frame observations.
Extensive experiments on both simulated and real-world datasets demonstrate the superiority of EF-Calib over state-of-the-art methods. The continuous-time modeling and joint optimization lead to significantly more accurate spatiotemporal calibration, enabling applications like robust visual odometry and 3D reconstruction that combine the strengths of event and frame cameras.
Critical Analysis
The paper provides a thorough evaluation of EF-Calib, comparing it to several baseline methods across multiple datasets. The results clearly show the benefits of the continuous-time trajectory modeling and joint optimization approach.
However, the paper does not address potential limitations or failure cases of the method. For example, it is unclear how EF-Calib would perform in the presence of large, abrupt camera motions that violate the smooth trajectory assumption. Additionally, the method requires prior 3D information about the environment, which may not always be available in practical scenarios.
Further research could explore ways to relax these assumptions, such as by incorporating inertial measurement unit (IMU) data as in Lightweight Spatiotemporal Network for Online Eye Tracking with Events, or by developing self-calibration techniques that do not rely on known 3D structure.
Conclusion
The EF-Calib method presented in this paper represents an important advance in spatiotemporal calibration for event-based and frame-based cameras. By modeling the camera trajectory as a continuous-time function, the technique can achieve more accurate alignment of the two data modalities, enabling robust fusion for applications like visual odometry and 3D reconstruction.
The promising results demonstrate the value of combining the complementary strengths of event and frame cameras, with the potential to significantly improve the performance of computer vision systems in challenging real-world scenarios. Further development and exploration of the limitations of this approach could lead to even broader applicability and impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
EF-Calib: Spatiotemporal Calibration of Event- and Frame-Based Cameras Using Continuous-Time Trajectories
Shaoan Wang, Zhanhua Xin, Yaoqing Hu, Dongyue Li, Mingzhu Zhu, Junzhi Yu
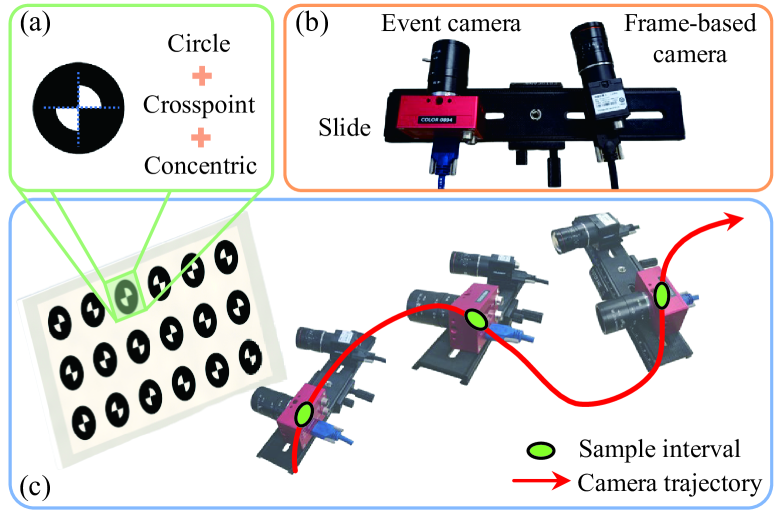
Event camera, a bio-inspired asynchronous triggered camera, offers promising prospects for fusion with frame-based cameras owing to its low latency and high dynamic range. However, calibrating stereo vision systems that incorporate both event and frame-based cameras remains a significant challenge. In this letter, we present EF-Calib, a spatiotemporal calibration framework for event- and frame-based cameras using continuous-time trajectories. A novel calibration pattern applicable to both camera types and the corresponding event recognition algorithm is proposed. Leveraging the asynchronous nature of events, a derivable piece-wise B-spline to represent camera pose continuously is introduced, enabling calibration for intrinsic parameters, extrinsic parameters, and time offset, with analytical Jacobians provided. Various experiments are carried out to evaluate the calibration performance of EF-Calib, including calibration experiments for intrinsic parameters, extrinsic parameters, and time offset. Experimental results show that EF-Calib achieves the most accurate intrinsic parameters compared to current SOTA, the close accuracy of the extrinsic parameters compared to the frame-based results, and accurate time offset estimation. EF-Calib provides a convenient and accurate toolbox for calibrating the system that fuses events and frames. The code of this paper will also be open-sourced at: https://github.com/wsakobe/EF-Calib.
Read more5/28/2024
🔍
0
An Event-based Algorithm for Simultaneous 6-DOF Camera Pose Tracking and Mapping
Masoud Dayani Najafabadi, Mohammad Reza Ahmadzadeh
Compared to regular cameras, Dynamic Vision Sensors or Event Cameras can output compact visual data based on a change in the intensity in each pixel location asynchronously. In this paper, we study the application of current image-based SLAM techniques to these novel sensors. To this end, the information in adaptively selected event windows is processed to form motion-compensated images. These images are then used to reconstruct the scene and estimate the 6-DOF pose of the camera. We also propose an inertial version of the event-only pipeline to assess its capabilities. We compare the results of different configurations of the proposed algorithm against the ground truth for sequences of two publicly available event datasets. We also compare the results of the proposed event-inertial pipeline with the state-of-the-art and show it can produce comparable or more accurate results provided the map estimate is reliable.
Read more6/27/2024

0
Temporal Event Stereo via Joint Learning with Stereoscopic Flow
Hoonhee Cho, Jae-Young Kang, Kuk-Jin Yoon
Event cameras are dynamic vision sensors inspired by the biological retina, characterized by their high dynamic range, high temporal resolution, and low power consumption. These features make them capable of perceiving 3D environments even in extreme conditions. Event data is continuous across the time dimension, which allows a detailed description of each pixel's movements. To fully utilize the temporally dense and continuous nature of event cameras, we propose a novel temporal event stereo, a framework that continuously uses information from previous time steps. This is accomplished through the simultaneous training of an event stereo matching network alongside stereoscopic flow, a new concept that captures all pixel movements from stereo cameras. Since obtaining ground truth for optical flow during training is challenging, we propose a method that uses only disparity maps to train the stereoscopic flow. The performance of event-based stereo matching is enhanced by temporally aggregating information using the flows. We have achieved state-of-the-art performance on the MVSEC and the DSEC datasets. The method is computationally efficient, as it stacks previous information in a cascading manner. The code is available at https://github.com/mickeykang16/TemporalEventStereo.
Read more7/16/2024
📶
0
Event-based Visual Inertial Velometer
Xiuyuan Lu, Yi Zhou, Junkai Niu, Sheng Zhong, Shaojie Shen
Neuromorphic event-based cameras are bio-inspired visual sensors with asynchronous pixels and extremely high temporal resolution. Such favorable properties make them an excellent choice for solving state estimation tasks under aggressive ego motion. However, failures of camera pose tracking are frequently witnessed in state-of-the-art event-based visual odometry systems when the local map cannot be updated in time. One of the biggest roadblocks for this specific field is the absence of efficient and robust methods for data association without imposing any assumption on the environment. This problem seems, however, unlikely to be addressed as in standard vision due to the motion-dependent observability of event data. Therefore, we propose a mapping-free design for event-based visual-inertial state estimation in this paper. Instead of estimating the position of the event camera, we find that recovering the instantaneous linear velocity is more consistent with the differential working principle of event cameras. The proposed event-based visual-inertial velometer leverages a continuous-time formulation that incrementally fuses the heterogeneous measurements from a stereo event camera and an inertial measurement unit. Experiments on the synthetic dataset demonstrate that the proposed method can recover instantaneous linear velocity in metric scale with low latency.
Read more6/3/2024