Excitable crawling

0
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Excitable crawling
Juncal Arbelaiz, Alessio Franci, Naomi Ehrich Leonard, Rodolphe Sepulchre, Bassam Bamieh
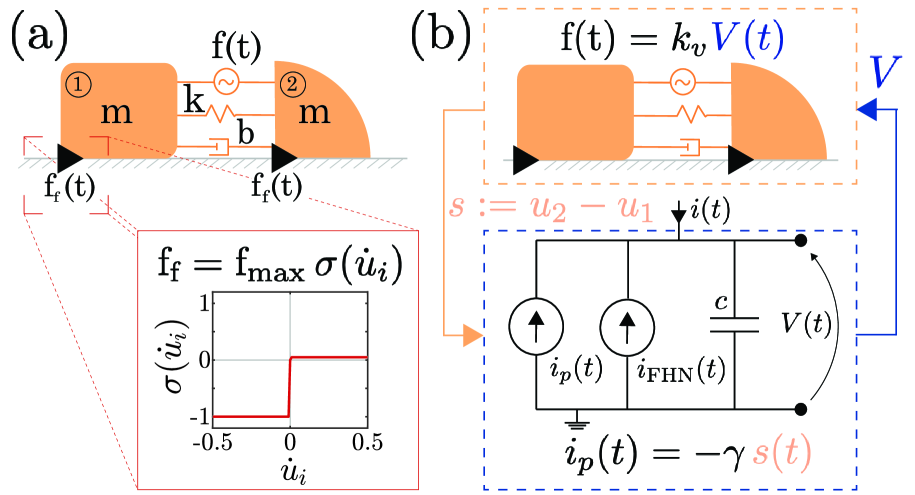
We propose and analyze the suitability of a spiking controller to engineer the locomotion of a soft robotic crawler. Inspired by the FitzHugh-Nagumo model of neural excitability, we design a bistable controller with an electrical flipflop circuit representation capable of generating spikes on-demand when coupled to the passive crawler mechanics. A proprioceptive sensory signal from the crawler mechanics turns bistability of the controller into a rhythmic spiking. The output voltage, in turn, activates the crawler's actuators to generate movement through peristaltic waves. We show through geometric analysis that this control strategy achieves endogenous crawling. The electro-mechanical sensorimotor interconnection provides embodied negative feedback regulation, facilitating locomotion. Dimensional analysis provides insights on the characteristic scales in the crawler's mechanical and electrical dynamics, and how they determine the crawling gait. Adaptive control of the electrical scales to optimally match the mechanical scales can be envisioned to achieve further efficiency, as in homeostatic regulation of neuronal circuits. Our approach can scale up to multiple sensorimotor loops inspired by biological central pattern generators.
Read more6/3/2024

0
Learning-based Hierarchical Control: Emulating the Central Nervous System for Bio-Inspired Legged Robot Locomotion
Ge Sun, Milad Shafiee, Peizhuo Li, Guillaume Bellegarda, Auke Ijspeert, Guillaume Sartoretti
Animals possess a remarkable ability to navigate challenging terrains, achieved through the interplay of various pathways between the brain, central pattern generators (CPGs) in the spinal cord, and musculoskeletal system. Traditional bioinspired control frameworks often rely on a singular control policy that models both higher (supraspinal) and spinal cord functions. In this work, we build upon our previous research by introducing two distinct neural networks: one tasked with modulating the frequency and amplitude of CPGs to generate the basic locomotor rhythm (referred to as the spinal policy, SCP), and the other responsible for receiving environmental perception data and directly modulating the rhythmic output from the SCP to execute precise movements on challenging terrains (referred to as the descending modulation policy). This division of labor more closely mimics the hierarchical locomotor control systems observed in legged animals, thereby enhancing the robot's ability to navigate various uneven surfaces, including steps, high obstacles, and terrains with gaps. Additionally, we investigate the impact of sensorimotor delays within our framework, validating several biological assumptions about animal locomotion systems. Specifically, we demonstrate that spinal circuits play a crucial role in generating the basic locomotor rhythm, while descending pathways are essential for enabling appropriate gait modifications to accommodate uneven terrain. Notably, our findings also reveal that the multi-layered control inherent in animals exhibits remarkable robustness against time delays. Through these investigations, this paper contributes to a deeper understanding of the fundamental principles of interplay between spinal and supraspinal mechanisms in biological locomotion. It also supports the development of locomotion controllers in parallel to biological structures which are ...
Read more4/30/2024

0
Physical synchronization of soft self-oscillating limbs for fast and autonomous locomotion
Alberto Comoretto, Harmannus A. H. Schomaker, Johannes T. B. Overvelde
Animals achieve robust locomotion by offloading regulation from the brain to physical couplings within the body. Contrarily, locomotion in artificial systems often depends on centralized processors. Here, we introduce a rapid and autonomous locomotion strategy with synchronized gaits emerging through physical interactions between self-oscillating limbs and the environment, without control signals. Each limb is a single soft tube that only requires constant flow of air to perform cyclic stepping motions at frequencies reaching 300 hertz. By combining several of these self-oscillating limbs, their physical synchronization enables tethered and untethered locomotion speeds that are orders of magnitude faster than comparable state-of-the-art. We demonstrate that these seemingly simple devices exhibit autonomy, including obstacle avoidance and phototaxis, opening up avenues for robust and functional robots at all scales.
Read more9/12/2024

0
Embodying Control in Soft Multistable Grippers from morphofunctional co-design
Juan C. Osorio (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Jhonatan S. Rincon (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Harith Morgan (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Andres F. Arrieta (School of Mechanical Engineering, Purdue University, West Lafayette, USA)
Soft robots are distinguished by their flexible and adaptable, allowing them to perform tasks that are nearly impossible for rigid robots. However, controlling their configuration is challenging due to their nonlinear material response and infinite deflection degrees of freedom. A potential solution is to discretize the infinite-dimensional configuration space of soft robots into a finite but sufficiently large number of functional shapes. This study explores a co-design strategy for pneumatically actuated soft grippers with multiple encoded stable states, enabling desired functional shape and stiffness reconfiguration. An energy based analytical model for soft multistable grippers is presented, mapping the robots' infinite-dimensional configuration space into discrete stable states, allowing for prediction of the systems final state and dynamic behavior. Our approach introduces a general method to capture the soft robots' response with the lattice lumped parameters using automatic relevance determination regression, facilitating inverse co-design. The resulting computationally efficient model enables us to explore the configuration space in a tractable manner, allowing the inverse co-design of our robots by setting desired targeted positions with optimized stiffness of the set targets. This strategy offers a framework for controlling soft robots by exploiting the nonlinear mechanics of multistable structures, thus embodying mechanical intelligence into soft structures.
Read more7/12/2024