Embodying Control in Soft Multistable Grippers from morphofunctional co-design

0

Sign in to get full access
Overview
- This paper presents a design methodology for creating soft multistable grippers that can embody control through their morphology and material properties.
- The researchers developed a novel co-design approach that integrates mechanical design, material selection, and control to produce highly capable yet simple gripping systems.
- The grippers leverage multistability - the ability to maintain multiple stable configurations - to enable a range of grasping and manipulation capabilities without the need for complex control systems.
Plain English Explanation
The researchers in this paper have found a way to create soft robotic grippers that can perform complex grasping and manipulation tasks without needing advanced control systems. They did this by designing the physical structure and materials of the grippers to have multiple stable configurations, a property known as multistability.
By carefully designing the shape and materials of the grippers, the researchers were able to imbue the grippers with the ability to naturally settle into different stable states. This allows the grippers to adapt to different object shapes and sizes without the need for complex control algorithms or many motors and actuators. The grippers can simply "snap" into the right configuration to grasp an object, in a similar way that a tensegrity-based robotic system can change its stiffness.
The key innovation of this work is the co-design approach, where the researchers simultaneously optimized the mechanical design, material selection, and control strategy to create a highly capable yet simple gripper. This allowed them to combine rigid and soft components in a way that leveraged the strengths of each to achieve the desired grasping performance.
Technical Explanation
The researchers developed a co-design methodology that tightly integrates the mechanical design, material selection, and control strategy to create soft multistable grippers. They started by designing the overall gripper morphology to have multiple stable configurations, leveraging principles of underactuated control where a single input can produce complex motions.
Through finite element analysis and optimization, the researchers determined the optimal shape, thickness, and material properties of the soft gripper components to achieve the desired multistable behavior. This allowed them to precisely tune the gripper's ability to adapt to different object shapes and sizes without the need for extensive closed-loop control.
The researchers then validated their co-design approach through physical prototyping and experimental testing. They demonstrated the grippers' ability to grasp a wide variety of objects, including fragile and irregularly-shaped items, by simply actuating a single input. The grippers were able to maintain stable grasps without the need for continuous control signals, showing how the embodied control enabled by the morphology and material properties can greatly simplify the control requirements.
Critical Analysis
The researchers provide a thorough and rigorous co-design methodology for creating soft multistable grippers. Their approach of simultaneously optimizing the mechanical design, material selection, and control strategy is a key strength, as it allows them to fully leverage the synergies between these different aspects.
One potential limitation is that the co-design process may be computationally intensive, especially for more complex gripper designs. The researchers mention that they used finite element analysis, which can be time-consuming. It would be interesting to see if there are ways to streamline this process or make it more accessible.
Additionally, while the grippers demonstrated impressive grasping capabilities, the paper does not extensively explore the long-term reliability and durability of the soft components. Soft robotics often faces challenges with wear and tear, so further research into the lifespan and robustness of these multistable grippers would be valuable.
Overall, this work makes an important contribution to the field of soft robotics by showing how embodied control can be used to create highly capable yet simple gripping systems. The researchers' co-design approach could potentially be applied to other soft robotic applications beyond just grasping, such as locomotion or manipulation.
Conclusion
The key contribution of this paper is the development of a co-design methodology for creating soft multistable grippers that can embody control through their morphology and material properties. By tightly integrating the mechanical design, material selection, and control strategy, the researchers were able to produce grippers that can adapt to a wide range of objects without the need for complex control systems.
This work demonstrates the power of embodied control, where the physical design of a system can be leveraged to simplify the control requirements. The soft multistable grippers, with their ability to naturally settle into different stable configurations, provide a template for how robotics can move beyond traditional control-centric approaches towards more holistic, morphologically-informed designs. As the field of soft robotics continues to advance, this type of co-design methodology could have significant implications for the development of highly capable yet simple robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Embodying Control in Soft Multistable Grippers from morphofunctional co-design
Juan C. Osorio (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Jhonatan S. Rincon (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Harith Morgan (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Andres F. Arrieta (School of Mechanical Engineering, Purdue University, West Lafayette, USA)
Soft robots are distinguished by their flexible and adaptable, allowing them to perform tasks that are nearly impossible for rigid robots. However, controlling their configuration is challenging due to their nonlinear material response and infinite deflection degrees of freedom. A potential solution is to discretize the infinite-dimensional configuration space of soft robots into a finite but sufficiently large number of functional shapes. This study explores a co-design strategy for pneumatically actuated soft grippers with multiple encoded stable states, enabling desired functional shape and stiffness reconfiguration. An energy based analytical model for soft multistable grippers is presented, mapping the robots' infinite-dimensional configuration space into discrete stable states, allowing for prediction of the systems final state and dynamic behavior. Our approach introduces a general method to capture the soft robots' response with the lattice lumped parameters using automatic relevance determination regression, facilitating inverse co-design. The resulting computationally efficient model enables us to explore the configuration space in a tractable manner, allowing the inverse co-design of our robots by setting desired targeted positions with optimized stiffness of the set targets. This strategy offers a framework for controlling soft robots by exploiting the nonlinear mechanics of multistable structures, thus embodying mechanical intelligence into soft structures.
Read more7/12/2024
0
Underactuated Control of Multiple Soft Pneumatic Actuators via Stable Inversion
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
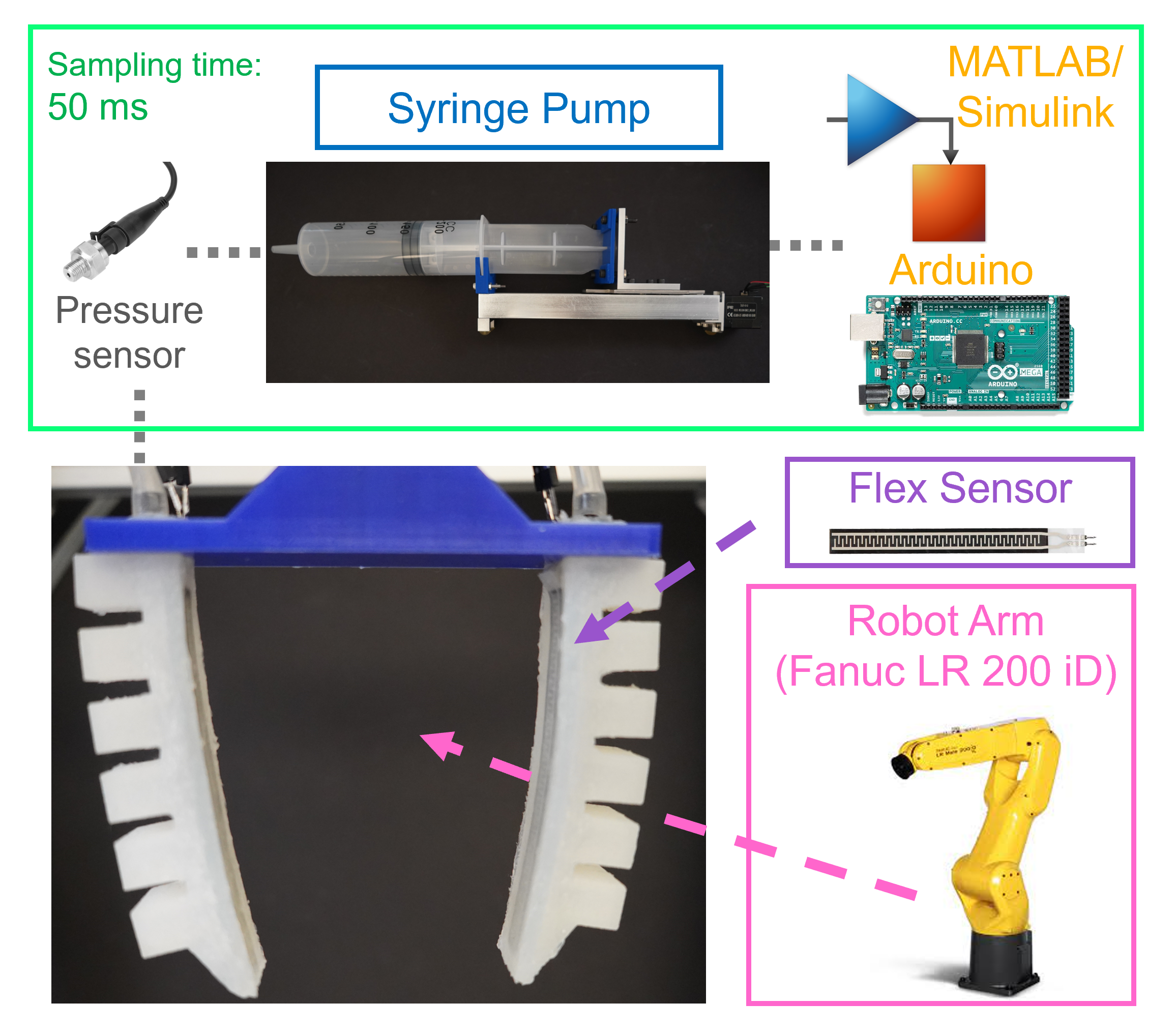
Soft grippers, with their inherent compliance and adaptability, show advantages for delicate and versatile manipulation tasks in robotics. This paper presents a novel approach to underactuated control of multiple soft actuators, specifically focusing on the synchronization of soft fingers within a soft gripper. Utilizing a single syringe pump as the actuation mechanism, we address the challenge of coordinating multiple degrees of freedom of a compliant system. The theoretical framework applies concepts from stable inversion theory, adapting them to the unique dynamics of the underactuated soft gripper. Through meticulous mechatronic system design and controller synthesis, we demonstrate both in simulation and experimentation the efficacy and applicability of our approach in achieving precise and synchronized manipulation tasks. Our findings not only contribute to the advancement of soft robot control but also offer practical insights into the design and control of underactuated systems for real-world applications.
Read more6/10/2024

0
Dynamic single-input control of multi-state multi-transition soft robotic actuator
Geron Yamit, Ben-Haim Eran, Gat D. Amir, Or Yizhar, Givli Sefi
Soft robotics is an attractive and rapidly emerging field, in which actuation is coupled with the elastic response of the robot's structure to achieve complex deformation patterns. A crucial challenge is the need for multiple control inputs, which adds significant complication to the system. We propose a novel concept of single-input control of an actuator composed of interconnected bi-stable elements. Dynamic response of the actuator and pre-designed differences between the elements are exploited to facilitate any desired multi-state transition, using a single dynamic input. We show formulation and analysis of the control system's dynamics and pre-design of its multiple equilibrium states, as well as their stability. Then we fabricate and demonstrate experimentally on single-input control of two- and four-element actuators, where the latter can achieve transitions between up to 48 desired states. Our work paves the way for next-generation soft robotic actuators with minimal actuation and maximal dexterity.
Read more7/23/2024
🔗
0
A Multimodal Soft Gripper with Variable Stiffness and Variable Gripping Range Based on MASH Actuator
Dannuo Li, Xuanyi Zhou, Quan Xiong, Chen-Hua Yeow
Soft pneumatic actuators with integrated strain limiting layers have emerged as predominant components in the field of soft gripper technology for several decades. However, owing to their intrinsic strain-limiting layer design, these soft grippers possess a singular gripping functionality, rendering them incapable of adapting to diverse gripping tasks with different strategies. Based on our previous work, we introduce a novel soft gripper that offers variable stiffness, an adjustable gripping range, and multifunctionality. The MASH actuator based soft gripper can expand its gripping range up to threefold compared to the original configuration and ensures secure grip by enhancing stiffness when handling heavy objects. Moreover, it supports multitasking gripping through specific gripping strategy control.
Read more8/13/2024