Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph

0

Sign in to get full access
Overview
- Explores a multi-UAV exploration strategy that is fast and communication-efficient
- Utilizes Voronoi partitioning on a dynamic topological graph
- Aims to enhance exploration coverage and reduce communication overhead
Plain English Explanation
This paper presents a new approach for coordinating multiple drones (also known as Unmanned Aerial Vehicles or UAVs) to efficiently explore and map an unknown environment. The key idea is to divide the exploration area into smaller Voronoi regions, with each drone responsible for covering its assigned region.
The drones maintain a dynamic topological graph that represents the environment and updates it as they explore. This allows them to continuously redefine their Voronoi regions and move to new areas efficiently, without the need for constant communication with a central command. By limiting communication, the system becomes more scalable and resilient to connectivity issues.
The researchers show through simulations that this approach can achieve faster exploration coverage and reduce overall communication overhead compared to other multi-UAV exploration strategies. This could be useful for applications like search and rescue operations, environmental monitoring, or mapping unknown terrains.
Technical Explanation
The paper proposes a Voronoi partition-based approach for coordinating multiple UAVs in an exploration task. The UAVs maintain a dynamic topological graph representation of the environment, which they update as they explore.
Each UAV is assigned a Voronoi region based on its position in the graph. The UAVs then plan paths to explore their assigned regions, communicating only when necessary to update the graph and coordinate their movements. This reduces the overall communication required compared to approaches that rely on constant centralized coordination.
The researchers develop algorithms for constructing and updating the topological graph, as well as for partitioning the exploration area into Voronoi regions and planning efficient paths within those regions. They evaluate the approach through extensive simulations, comparing its performance to other multi-UAV exploration strategies in terms of exploration coverage and communication overhead.
The results show that the Voronoi partition-based approach can achieve faster exploration coverage while requiring significantly less communication between the UAVs. This suggests it could be a promising strategy for real-world applications where efficient exploration and limited communication are important.
Critical Analysis
The paper provides a thorough technical explanation of the proposed multi-UAV exploration strategy and demonstrates its advantages through simulation experiments. However, there are a few potential limitations and areas for further research that could be addressed:
-
Real-world Validation: While the simulations suggest the approach is effective, it would be valuable to validate the performance in real-world experiments with physical UAVs operating in complex environments.
-
Robustness to Failures: The paper does not explicitly address how the system would handle the failure or loss of individual UAVs during the exploration process. Investigating the robustness of the approach to such failures would be an important next step.
-
Scalability at Larger Scales: The experiments in the paper focus on relatively small teams of up to 10 UAVs. It would be worthwhile to examine the scalability of the approach as the number of UAVs is increased, both in terms of exploration efficiency and communication overhead.
-
Adapting to Dynamic Environments: The current implementation assumes a static environment, but many real-world scenarios involve dynamic obstacles or changing conditions. Extending the approach to handle such dynamic environments would enhance its practical applicability.
Overall, the paper presents a promising multi-UAV exploration strategy that balances coverage, communication efficiency, and scalability. Further research to address the limitations mentioned could help advance the state of the art in coordinated multi-agent exploration systems.
Conclusion
This paper introduces a novel approach for coordinating multiple UAVs in an exploration task, using Voronoi partitioning on a dynamic topological graph. The key advantages of this strategy are its ability to achieve fast exploration coverage while significantly reducing the communication overhead between the UAVs.
The technical evaluation through simulations demonstrates the effectiveness of the approach, suggesting it could be a valuable tool for real-world applications such as search and rescue, environmental monitoring, and mapping unknown terrains. Future work to address the identified limitations and further validate the approach in realistic settings could help unlock the full potential of this multi-UAV exploration strategy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
Qianli Dong, Haobo Xi, Shiyong Zhang, Qingchen Bi, Tianyi Li, Ziyu Wang, Xuebo Zhang
Efficient data transmission and reasonable task allocation are important to improve multi-robot exploration efficiency. However, most communication data types typically contain redundant information and thus require massive communication volume. Moreover, exploration-oriented task allocation is far from trivial and becomes even more challenging for resource-limited unmanned aerial vehicles (UAVs). In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the emph{graph Voronoi partition} is used to allocate MR-DTG's nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using emph{graph Voronoi partition}. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3% and 95.5%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs. We will release the source code to benefit the community.
Read more8/13/2024
0
Distributed maze exploration using multiple agents and optimal goal assignment
Manousos Linardakis, Iraklis Varlamis, Georgios Th. Papadopoulos
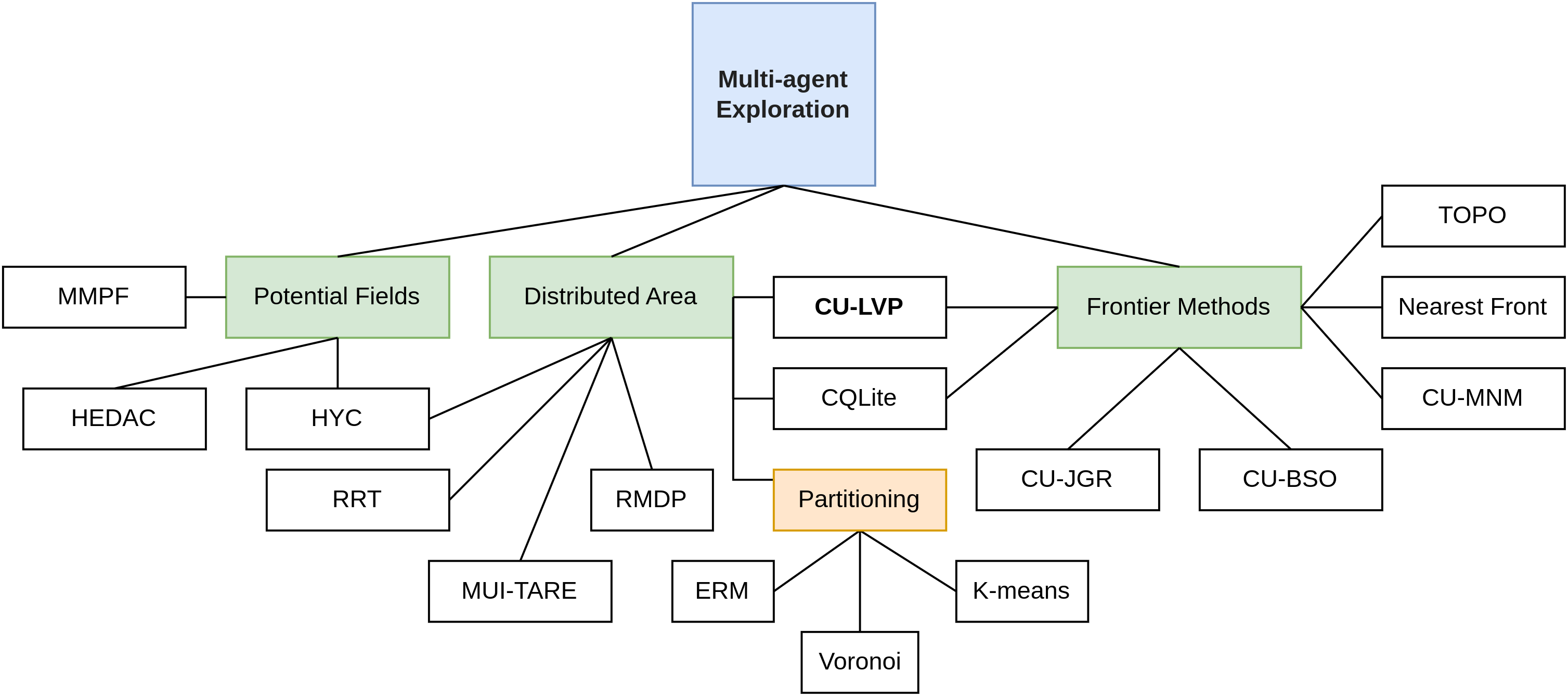
Robotic exploration has long captivated researchers aiming to map complex environments efficiently. Techniques such as potential fields and frontier exploration have traditionally been employed in this pursuit, primarily focusing on solitary agents. Recent advancements have shifted towards optimizing exploration efficiency through multiagent systems. However, many existing approaches overlook critical real-world factors, such as broadcast range limitations, communication costs, and coverage overlap. This paper addresses these gaps by proposing a distributed maze exploration strategy (CU-LVP) that assumes constrained broadcast ranges and utilizes Voronoi diagrams for better area partitioning. By adapting traditional multiagent methods to distributed environments with limited broadcast ranges, this study evaluates their performance across diverse maze topologies, demonstrating the efficacy and practical applicability of the proposed method. The code and experimental results supporting this study are available in the following repository: https://github.com/manouslinard/multiagent-exploration/.
Read more5/31/2024
⚙️
0
Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage
Aiman Munir, Ehsan Latif, Ramviyas Parasuraman
Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS.
Read more7/10/2024

0
An Active Search Strategy with Multiple Unmanned Aerial Systems for Multiple Targets
Chuanxiang Gao, Xinyi Wang, Xi Chen, Ben M. Chen
The challenge of efficient target searching in vast natural environments has driven the need for advanced multi-UAV active search strategies. This paper introduces a novel method in which global and local information is adeptly merged to avoid issues such as myopia and redundant back-and-forth movements. In addition, a trajectory generation method is used to ensure the search pattern within continuous space. To further optimize multi-agent cooperation, the Voronoi partition technique is employed, ensuring a reduction in repetitive flight patterns and making the control of multiple agents in a decentralized way. Through a series of experiments, the evaluation and comparison results demonstrate the efficiency of our approach in various environments. The primary application of this innovative approach is demonstrated in the search for horseshoe crabs within their wild habitats, showcasing its potential to revolutionize ecological survey and conservation efforts.
Read more6/26/2024