FAST GDRNPP: Improving the Speed of State-of-the-Art 6D Object Pose Estimation

0
Sign in to get full access
Overview
- Develops a faster version of the state-of-the-art GDRNPP method for 6D object pose estimation
- Achieves significant speedup while maintaining comparable accuracy
- Uses a novel network architecture and training strategy to accelerate inference
Plain English Explanation
The paper presents a new method called FAST GDRNPP that improves the speed of 6D object pose estimation, a task that determines the precise 3D position and orientation of an object in an image. 6D pose estimation is important for applications like robotic manipulation and augmented reality.
The authors start with the existing GDRNPP method, which is one of the state-of-the-art approaches for this task. However, GDRNPP can be slow, so the researchers developed FAST GDRNPP to significantly speed up the inference process while maintaining comparable accuracy.
The key innovations in FAST GDRNPP include:
- A novel network architecture that is more efficient and streamlined compared to GDRNPP
- A specialized training strategy that further boosts the speed of the model
Technical Explanation
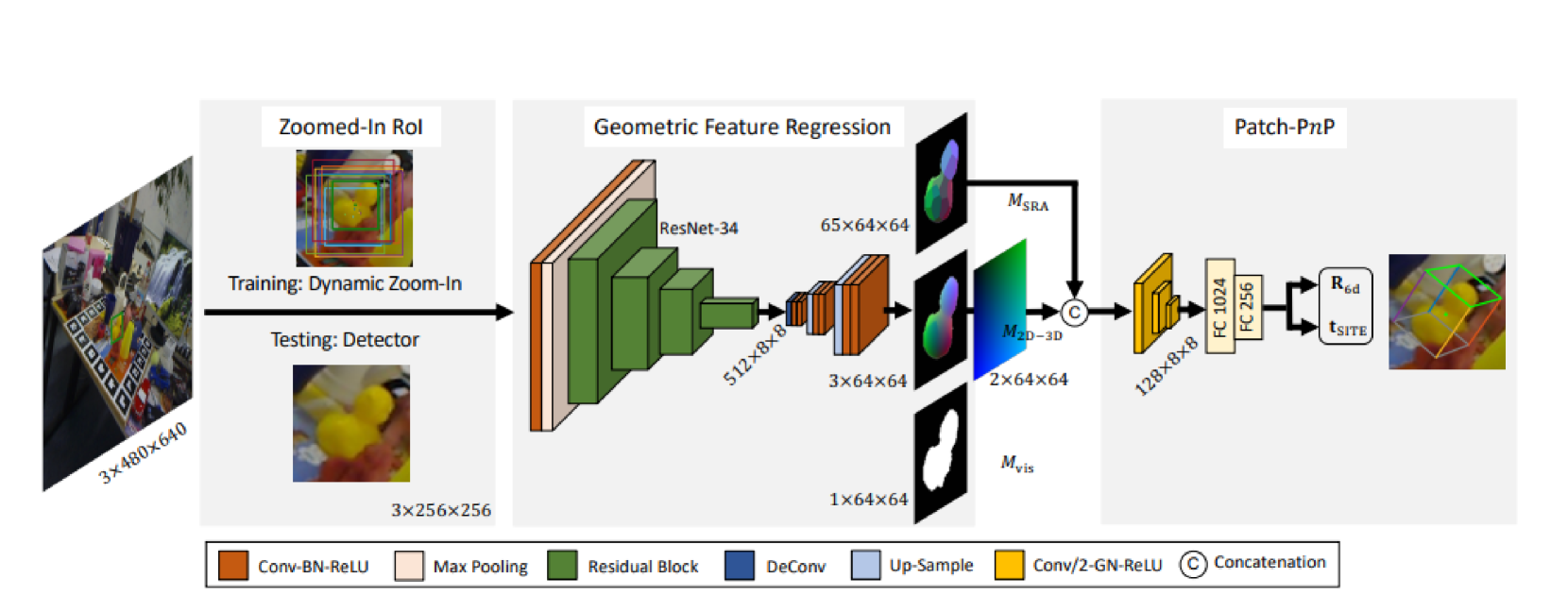
The paper builds upon the GDRNPP method, which uses a geometry-guided deep regression network to estimate the 6D pose of objects. FAST GDRNPP introduces several modifications to improve the inference speed:
- Network Architecture: The researchers designed a more compact and efficient network architecture compared to GDRNPP. This includes reducing the number of parameters and computation-heavy components.
- Training Strategy: The authors developed a specialized training strategy that involves progressive resizing of the input images during training. This helps the model learn to accurately estimate poses from lower-resolution inputs, boosting inference speed.
- Pose Representation: FAST GDRNPP uses a different 6D pose representation that is more efficient to regress compared to the one used in GDRNPP.
Through these innovations, FAST GDRNPP is able to achieve significant speedups (up to 4x) over GDRNPP while maintaining comparable accuracy on standard 6D pose estimation benchmarks.
Critical Analysis
The paper thoroughly evaluates FAST GDRNPP and compares it to several state-of-the-art methods, including the original GDRNPP. The results demonstrate the effectiveness of the proposed approach in improving inference speed without sacrificing accuracy.
However, the paper does not discuss potential limitations or future research directions. For example, it would be interesting to see how FAST GDRNPP performs on more challenging datasets or in real-world robotic applications. Additionally, the authors could explore ways to further improve the accuracy of the method without compromising speed.
Conclusion
The FAST GDRNPP method represents an important advancement in the field of 6D object pose estimation. By significantly improving the inference speed of the state-of-the-art GDRNPP approach, the researchers have made 6D pose estimation more practical for real-time applications such as robotics and augmented reality. This work showcases the value of optimizing the efficiency of machine learning models without compromising their performance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!FAST GDRNPP: Improving the Speed of State-of-the-Art 6D Object Pose Estimation
Thomas Pollabauer, Ashwin Pramod, Volker Knauthe, Michael Wahl
6D object pose estimation involves determining the three-dimensional translation and rotation of an object within a scene and relative to a chosen coordinate system. This problem is of particular interest for many practical applications in industrial tasks such as quality control, bin picking, and robotic manipulation, where both speed and accuracy are critical for real-world deployment. Current models, both classical and deep-learning-based, often struggle with the trade-off between accuracy and latency. Our research focuses on enhancing the speed of a prominent state-of-the-art deep learning model, GDRNPP, while keeping its high accuracy. We employ several techniques to reduce the model size and improve inference time. These techniques include using smaller and quicker backbones, pruning unnecessary parameters, and distillation to transfer knowledge from a large, high-performing model to a smaller, more efficient student model. Our findings demonstrate that the proposed configuration maintains accuracy comparable to the state-of-the-art while significantly improving inference time. This advancement could lead to more efficient and practical applications in various industrial scenarios, thereby enhancing the overall applicability of 6D Object Pose Estimation models in real-world settings.
Read more9/20/2024

0
New!End-to-End Probabilistic Geometry-Guided Regression for 6DoF Object Pose Estimation
Thomas Pollabauer, Jiayin Li, Volker Knauthe, Sarah Berkei, Arjan Kuijper
6D object pose estimation is the problem of identifying the position and orientation of an object relative to a chosen coordinate system, which is a core technology for modern XR applications. State-of-the-art 6D object pose estimators directly predict an object pose given an object observation. Due to the ill-posed nature of the pose estimation problem, where multiple different poses can correspond to a single observation, generating additional plausible estimates per observation can be valuable. To address this, we reformulate the state-of-the-art algorithm GDRNPP and introduce EPRO-GDR (End-to-End Probabilistic Geometry-Guided Regression). Instead of predicting a single pose per detection, we estimate a probability density distribution of the pose. Using the evaluation procedure defined by the BOP (Benchmark for 6D Object Pose Estimation) Challenge, we test our approach on four of its core datasets and demonstrate superior quantitative results for EPRO-GDR on LM-O, YCB-V, and ITODD. Our probabilistic solution shows that predicting a pose distribution instead of a single pose can improve state-of-the-art single-view pose estimation while providing the additional benefit of being able to sample multiple meaningful pose candidates.
Read more9/19/2024

0
PS6D: Point Cloud Based Symmetry-Aware 6D Object Pose Estimation in Robot Bin-Picking
Yifan Yang, Zhihao Cui, Qianyi Zhang, Jingtai Liu
6D object pose estimation holds essential roles in various fields, particularly in the grasping of industrial workpieces. Given challenges like rust, high reflectivity, and absent textures, this paper introduces a point cloud based pose estimation framework (PS6D). PS6D centers on slender and multi-symmetric objects. It extracts multi-scale features through an attention-guided feature extraction module, designs a symmetry-aware rotation loss and a center distance sensitive translation loss to regress the pose of each point to the centroid of the instance, and then uses a two-stage clustering method to complete instance segmentation and pose estimation. Objects from the Sil'eane and IPA datasets and typical workpieces from industrial practice are used to generate data and evaluate the algorithm. In comparison to the state-of-the-art approach, PS6D demonstrates an 11.5% improvement in F$_{1_{inst}}$ and a 14.8% improvement in Recall. The main part of PS6D has been deployed to the software of Mech-Mind, and achieves a 91.7% success rate in bin-picking experiments, marking its application in industrial pose estimation tasks.
Read more5/21/2024
0
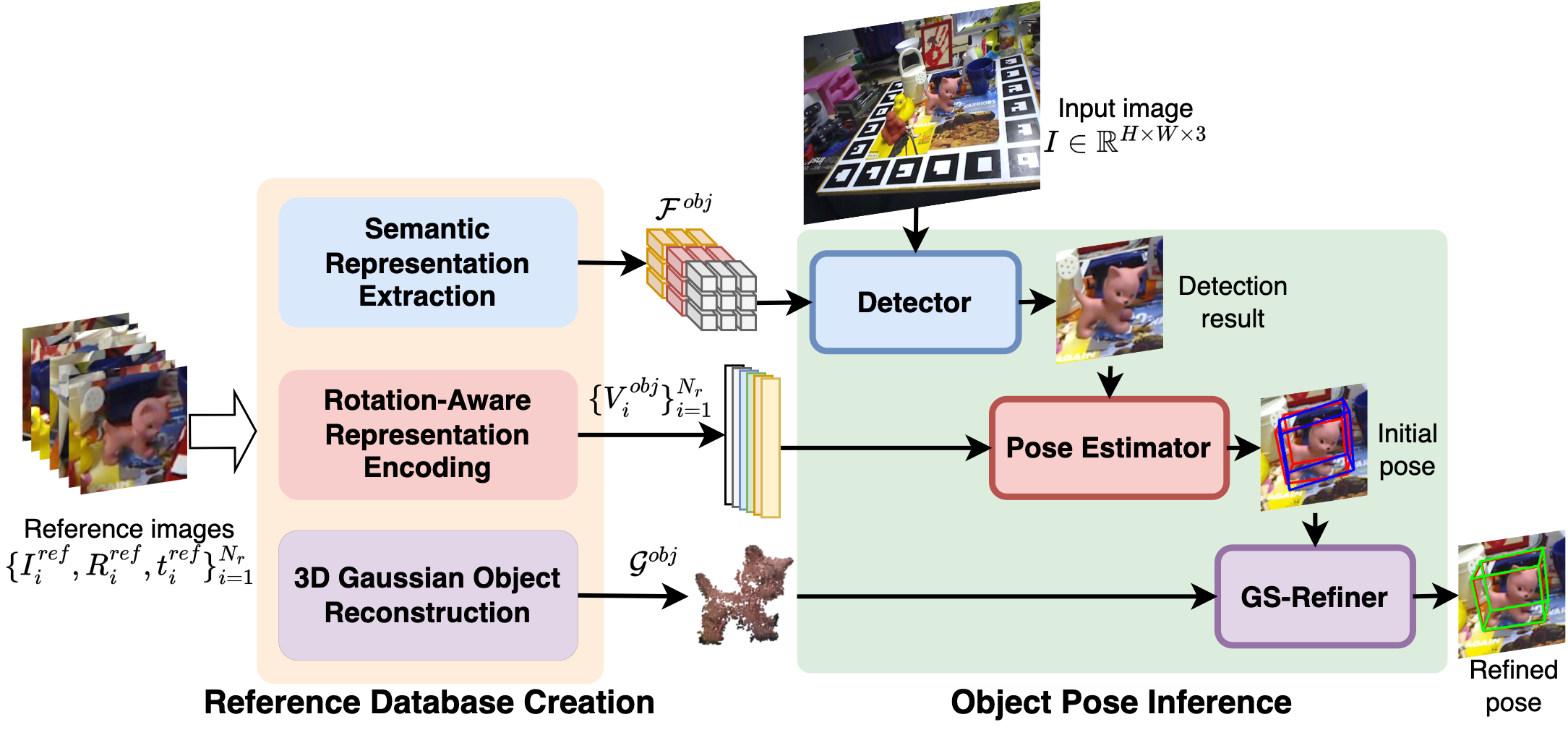
GS-Pose: Generalizable Segmentation-based 6D Object Pose Estimation with 3D Gaussian Splatting
Dingding Cai, Janne Heikkila, Esa Rahtu
This paper introduces GS-Pose, a unified framework for localizing and estimating the 6D pose of novel objects. GS-Pose begins with a set of posed RGB images of a previously unseen object and builds three distinct representations stored in a database. At inference, GS-Pose operates sequentially by locating the object in the input image, estimating its initial 6D pose using a retrieval approach, and refining the pose with a render-and-compare method. The key insight is the application of the appropriate object representation at each stage of the process. In particular, for the refinement step, we leverage 3D Gaussian splatting, a novel differentiable rendering technique that offers high rendering speed and relatively low optimization time. Off-the-shelf toolchains and commodity hardware, such as mobile phones, can be used to capture new objects to be added to the database. Extensive evaluations on the LINEMOD and OnePose-LowTexture datasets demonstrate excellent performance, establishing the new state-of-the-art. Project page: https://dingdingcai.github.io/gs-pose.
Read more8/15/2024