End-to-End Probabilistic Geometry-Guided Regression for 6DoF Object Pose Estimation

0

Sign in to get full access
Overview
- This paper presents an end-to-end probabilistic geometry-guided regression approach for 6DoF object pose estimation.
- The proposed method combines a neural network with a geometric reasoning module to jointly predict the object's position and orientation.
- The system is trained in an end-to-end manner, allowing it to leverage both visual and geometric cues for accurate pose estimation.
Plain English Explanation
The paper describes a new system for estimating the 6 degrees of freedom (6DoF) pose of objects in 3D space. 6DoF pose refers to an object's position (x, y, z coordinates) and orientation (roll, pitch, yaw angles).
The key idea is to combine a neural network, which can learn patterns from visual data, with a geometric reasoning module that incorporates prior knowledge about the 3D structure of objects. This joint approach allows the system to make use of both visual cues from the image and geometric constraints to predict the object's pose more accurately than using just one or the other.
The system is trained end-to-end, meaning the entire pipeline is optimized together rather than in separate stages. This enables the model to learn how to effectively combine the visual and geometric information.
Overall, the goal is to develop a robust and reliable 6DoF pose estimation system that can be used in applications like augmented reality, robotics, and autonomous driving, where knowing the precise 3D pose of objects in the environment is crucial.
Technical Explanation
The proposed method consists of two key components:
-
Neural Network: This is a deep learning model that takes an input image and predicts the 6DoF pose of the object. The network is trained to output the object's position (x, y, z) and orientation (roll, pitch, yaw) in a probabilistic manner, capturing the uncertainty in the predictions.
-
Geometric Reasoning Module: This module incorporates prior knowledge about the 3D structure of the object to guide the pose estimation. It does this by leveraging the object's 3D mesh model, which provides information about the object's geometry.
The neural network and geometric reasoning module are integrated into an end-to-end system that is trained jointly. This allows the model to learn how to effectively combine the visual and geometric cues for accurate 6DoF pose estimation.
The authors evaluate their approach on standard 6DoF pose estimation benchmarks and demonstrate state-of-the-art performance, outperforming previous methods that rely solely on visual or geometric information.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed method, testing it on multiple datasets and comparing it to various baselines. The authors also discuss several limitations and potential areas for future work:
- The geometric reasoning module relies on the availability of accurate 3D mesh models for the objects, which may not always be practical in real-world scenarios.
- The system currently only supports a single object in the scene, and extending it to handle multiple objects simultaneously would be an important next step.
- The runtime performance of the end-to-end system could be further optimized to enable real-time applications.
Additionally, while the paper demonstrates impressive results, it would be valuable to see further analysis of the system's robustness to variations in lighting, occlusion, and other real-world challenges that can impact pose estimation performance.
Conclusion
This paper presents a novel end-to-end approach for 6DoF object pose estimation that combines the strengths of deep learning and geometric reasoning. By jointly optimizing the visual and geometric components, the system is able to achieve state-of-the-art performance on standard benchmarks.
The proposed method has the potential to significantly impact applications like augmented reality, robotics, and autonomous driving, where accurate 3D pose estimation is crucial for understanding and interacting with the environment. As the authors note, further refinements and extensions of the approach could lead to even more robust and practical 6DoF pose estimation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!End-to-End Probabilistic Geometry-Guided Regression for 6DoF Object Pose Estimation
Thomas Pollabauer, Jiayin Li, Volker Knauthe, Sarah Berkei, Arjan Kuijper
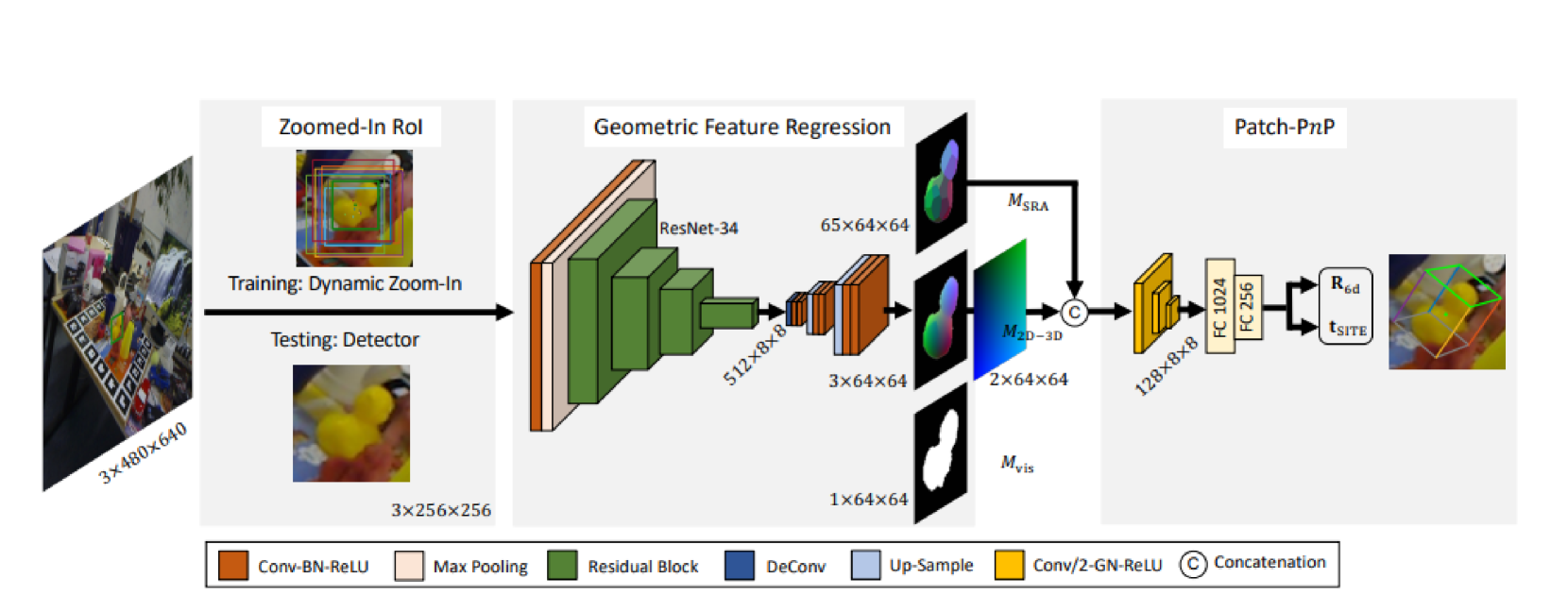
6D object pose estimation is the problem of identifying the position and orientation of an object relative to a chosen coordinate system, which is a core technology for modern XR applications. State-of-the-art 6D object pose estimators directly predict an object pose given an object observation. Due to the ill-posed nature of the pose estimation problem, where multiple different poses can correspond to a single observation, generating additional plausible estimates per observation can be valuable. To address this, we reformulate the state-of-the-art algorithm GDRNPP and introduce EPRO-GDR (End-to-End Probabilistic Geometry-Guided Regression). Instead of predicting a single pose per detection, we estimate a probability density distribution of the pose. Using the evaluation procedure defined by the BOP (Benchmark for 6D Object Pose Estimation) Challenge, we test our approach on four of its core datasets and demonstrate superior quantitative results for EPRO-GDR on LM-O, YCB-V, and ITODD. Our probabilistic solution shows that predicting a pose distribution instead of a single pose can improve state-of-the-art single-view pose estimation while providing the additional benefit of being able to sample multiple meaningful pose candidates.
Read more9/19/2024
0
New!FAST GDRNPP: Improving the Speed of State-of-the-Art 6D Object Pose Estimation
Thomas Pollabauer, Ashwin Pramod, Volker Knauthe, Michael Wahl
6D object pose estimation involves determining the three-dimensional translation and rotation of an object within a scene and relative to a chosen coordinate system. This problem is of particular interest for many practical applications in industrial tasks such as quality control, bin picking, and robotic manipulation, where both speed and accuracy are critical for real-world deployment. Current models, both classical and deep-learning-based, often struggle with the trade-off between accuracy and latency. Our research focuses on enhancing the speed of a prominent state-of-the-art deep learning model, GDRNPP, while keeping its high accuracy. We employ several techniques to reduce the model size and improve inference time. These techniques include using smaller and quicker backbones, pruning unnecessary parameters, and distillation to transfer knowledge from a large, high-performing model to a smaller, more efficient student model. Our findings demonstrate that the proposed configuration maintains accuracy comparable to the state-of-the-art while significantly improving inference time. This advancement could lead to more efficient and practical applications in various industrial scenarios, thereby enhancing the overall applicability of 6D Object Pose Estimation models in real-world settings.
Read more9/20/2024

0
KGpose: Keypoint-Graph Driven End-to-End Multi-Object 6D Pose Estimation via Point-Wise Pose Voting
Andrew Jeong
This letter presents KGpose, a novel end-to-end framework for 6D pose estimation of multiple objects. Our approach combines keypoint-based method with learnable pose regression through `keypoint-graph', which is a graph representation of the keypoints. KGpose first estimates 3D keypoints for each object using an attentional multi-modal feature fusion of RGB and point cloud features. These keypoints are estimated from each point of point cloud and converted into a graph representation. The network directly regresses 6D pose parameters for each point through a sequence of keypoint-graph embedding and local graph embedding which are designed with graph convolutions, followed by rotation and translation heads. The final pose for each object is selected from the candidates of point-wise predictions. The method achieves competitive results on the benchmark dataset, demonstrating the effectiveness of our model. KGpose enables multi-object pose estimation without requiring an extra localization step, offering a unified and efficient solution for understanding geometric contexts in complex scenes for robotic applications.
Read more7/15/2024
🌐
0
RDPN6D: Residual-based Dense Point-wise Network for 6Dof Object Pose Estimation Based on RGB-D Images
Zong-Wei Hong, Yen-Yang Hung, Chu-Song Chen
In this work, we introduce a novel method for calculating the 6DoF pose of an object using a single RGB-D image. Unlike existing methods that either directly predict objects' poses or rely on sparse keypoints for pose recovery, our approach addresses this challenging task using dense correspondence, i.e., we regress the object coordinates for each visible pixel. Our method leverages existing object detection methods. We incorporate a re-projection mechanism to adjust the camera's intrinsic matrix to accommodate cropping in RGB-D images. Moreover, we transform the 3D object coordinates into a residual representation, which can effectively reduce the output space and yield superior performance. We conducted extensive experiments to validate the efficacy of our approach for 6D pose estimation. Our approach outperforms most previous methods, especially in occlusion scenarios, and demonstrates notable improvements over the state-of-the-art methods. Our code is available on https://github.com/AI-Application-and-Integration-Lab/RDPN6D.
Read more5/15/2024