An FBG-based Stiffness Estimation Sensor for In-vivo Diagnostics

0

Sign in to get full access
Overview
- The paper presents a Fiber Bragg Grating (FBG)-based sensor for in-vivo estimation of tissue stiffness, which can be useful for medical diagnostics.
- The sensor uses the shift in the Bragg wavelength of an FBG to measure the deformation of the tissue and calculate its stiffness.
- The researchers tested the sensor on a silicone phantom and a porcine liver, demonstrating its ability to estimate tissue stiffness.
Plain English Explanation
The researchers have developed a new sensor that can measure the stiffness of tissues inside the body, which could be useful for medical diagnoses. The sensor uses a special type of optical fiber called a Fiber Bragg Grating (FBG). When this fiber is pressed against the tissue, the light inside the fiber changes in a way that can be used to calculate the stiffness of the tissue.
The researchers tested this sensor on a silicone model that mimics real tissue, as well as on a piece of liver from a pig. They found that the sensor was able to accurately measure the stiffness of these materials. This suggests that the sensor could be used to check the health of tissues inside the human body, which could help doctors diagnose conditions like cancers or muscle injuries.
Technical Explanation
The researchers developed an FBG-based sensor to estimate the stiffness of tissues in-vivo. The sensor works by using the shift in the Bragg wavelength of the FBG to measure the deformation of the tissue when the sensor is pressed against it. This deformation information is then used to calculate the stiffness of the tissue.
To test the sensor, the researchers first characterized its performance on a silicone phantom with known stiffness properties. They found that the sensor could accurately estimate the stiffness of the phantom across a range of values. The researchers then tested the sensor on a porcine liver sample, demonstrating its ability to measure the stiffness of real biological tissue.
The results show that this FBG-based sensor has the potential to be a useful tool for in-vivo diagnostic applications, such as assessing the mechanical properties of surgical continuum manipulators or estimating ground reaction forces during gait. The sensor's small size, flexibility, and ability to measure stiffness non-invasively make it a promising candidate for clinical use.
Critical Analysis
The paper presents a novel approach to in-vivo stiffness estimation using an FBG-based sensor, which could have important applications in medical diagnostics. However, the research is still in the early stages, and there are a few limitations that should be considered.
First, the experiments were conducted on simple, homogeneous phantoms and a single porcine liver sample. More extensive testing is needed to evaluate the sensor's performance on a wider range of biological tissues with varying stiffness properties and heterogeneous structures, such as different types of tumors.
Additionally, the paper does not address how the sensor would be integrated into a clinical setting or the challenges of using it on living human subjects. Issues such as sensor placement, tissue deformation, and potential interference from surrounding organs or fluids would need to be carefully considered.
Further research is also needed to understand the sensor's shape estimation capabilities and uncertainty quantification when measuring tissue stiffness, as these factors will be crucial for clinical decision-making.
Conclusion
The FBG-based stiffness estimation sensor presented in this paper represents a promising step towards more accurate and non-invasive in-vivo diagnostics. By leveraging the unique properties of FBG technology, the researchers have developed a compact and flexible sensor that can measure tissue stiffness, which is a valuable indicator of tissue health and disease.
While the current results are encouraging, further development and testing will be necessary to fully realize the potential of this technology for clinical applications. Ongoing research in areas such as shape estimation, force measurement, and uncertainty quantification will be critical for advancing the capabilities and reliability of FBG-based sensors for in-vivo diagnostics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An FBG-based Stiffness Estimation Sensor for In-vivo Diagnostics
Behnam Moradkhani, Pejman Kheradmand, Harshith Jella, Kent K. Yamamoto, Alireza Tofangchi, Patrick J. Codd, Yash Chitalia
In-vivo tissue stiffness identification can be useful in pulmonary fibrosis diagnostics and minimally invasive tumor identification, among many other applications. In this work, we propose a palpation-based method for tissue stiffness estimation that uses a sensorized beam buckled onto the surface of a tissue. Fiber Bragg Gratings (FBGs) are used in our sensor as a shape-estimation modality to get real-time beam shape, even while the device is not visually monitored. A mechanical model is developed to predict the behavior of a buckling beam and is validated using finite element analysis and bench-top testing with phantom tissue samples (made of PDMS and PA-Gel). Bench-top estimations were conducted and the results were compared with the actual stiffness values. Mean RMSE and standard deviation (from the actual stiffnesses) values of 413.86 KPa and 313.82 KPa were obtained. Estimations for softer samples were relatively closer to the actual values. Ultimately, we used the stiffness sensor within a mock concentric tube robot as a demonstration of textit{in-vivo} sensor feasibility. Bench-top trials with and without the robot demonstrate the effectiveness of this unique sensing modality in textit{in-vivo} applications.
Read more6/3/2024

0
Simultaneous Estimation of Shape and Force along Highly Deformable Surgical Manipulators Using Sparse FBG Measurement
Yiang Lu, Bin Li, Wei Chen, Junyan Yan, Shing Shin Cheng, Jiangliu Wang, Jianshu Zhou, Qi Dou, Yun-hui Liu
Recently, fiber optic sensors such as fiber Bragg gratings (FBGs) have been widely investigated for shape reconstruction and force estimation of flexible surgical robots. However, most existing approaches need precise model parameters of FBGs inside the fiber and their alignments with the flexible robots for accurate sensing results. Another challenge lies in online acquiring external forces at arbitrary locations along the flexible robots, which is highly required when with large deflections in robotic surgery. In this paper, we propose a novel data-driven paradigm for simultaneous estimation of shape and force along highly deformable flexible robots by using sparse strain measurement from a single-core FBG fiber. A thin-walled soft sensing tube helically embedded with FBG sensors is designed for a robotic-assisted flexible ureteroscope with large deflection up to 270 degrees and a bend radius under 10 mm. We introduce and study three learning models by incorporating spatial strain encoders, and compare their performances in both free space and constrained environments with contact forces at different locations. The experimental results in terms of dynamic shape-force sensing accuracy demonstrate the effectiveness and superiority of the proposed methods.
Read more4/29/2024
0
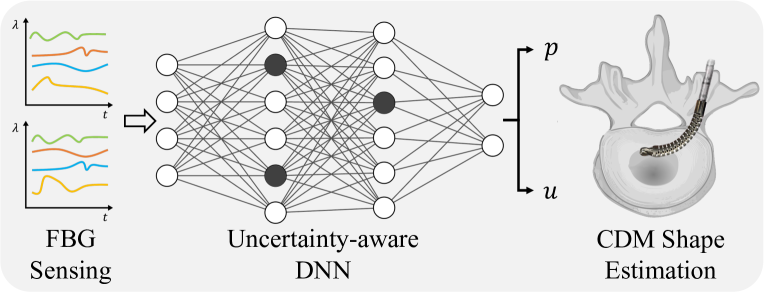
Uncertainty-Aware Shape Estimation of a Surgical Continuum Manipulator in Constrained Environments using Fiber Bragg Grating Sensors
Alexander Schwarz, Arian Mehrfard, Golchehr Amirkhani, Henry Phalen, Justin H. Ma, Robert B. Grupp, Alejandro Martin-Gomez, Mehran Armand
Continuum Dexterous Manipulators (CDMs) are well-suited tools for minimally invasive surgery due to their inherent dexterity and reachability. Nonetheless, their flexible structure and non-linear curvature pose significant challenges for shape-based feedback control. The use of Fiber Bragg Grating (FBG) sensors for shape sensing has shown great potential in estimating the CDM's tip position and subsequently reconstructing the shape using optimization algorithms. This optimization, however, is under-constrained and may be ill-posed for complex shapes, falling into local minima. In this work, we introduce a novel method capable of directly estimating a CDM's shape from FBG sensor wavelengths using a deep neural network. In addition, we propose the integration of uncertainty estimation to address the critical issue of uncertainty in neural network predictions. Neural network predictions are unreliable when the input sample is outside the training distribution or corrupted by noise. Recognizing such deviations is crucial when integrating neural networks within surgical robotics, as inaccurate estimations can pose serious risks to the patient. We present a robust method that not only improves the precision upon existing techniques for FBG-based shape estimation but also incorporates a mechanism to quantify the models' confidence through uncertainty estimation. We validate the uncertainty estimation through extensive experiments, demonstrating its effectiveness and reliability on out-of-distribution (OOD) data, adding an additional layer of safety and precision to minimally invasive surgical robotics.
Read more5/14/2024
🏅
0
Soft insoles for estimating 3D ground reaction forces using 3D printed foam-like sensors
Nick Willemstein, Saivimal Sridar, Herman van der Kooij, Ali Sadeghi
Sensorized insoles provide a tool for gait studies and health monitoring during daily life. For users to accept such insoles they need to be comfortable and lightweight. Previous work has already demonstrated that estimation of ground reaction forces (GRFs) is possible with insoles. However, these are often assemblies of commercial components restricting design freedom and customization. Within this work, we investigate using four 3D-printed soft foam-like sensors to sensorize an insole. These sensors were combined with system identification of Hammerstein-Wiener models to estimate the 3D GRFs, which were compared to values from an instrumented treadmill as the golden standard. It was observed that the four sensors behaved in line with the expected change in pressure distribution during the gait cycle. In addition, the identified (personalized) Hammerstein-Wiener models showed the best estimation performance (on average RMS error 9.3%, R^2=0.85 and mean absolute error (MAE) 7%) of the vertical, mediolateral, and anteroposterior GRFs. Thereby showing that these sensors can estimate the resulting 3D force reasonably well. These results for nine participants were comparable to or outperformed other works that used commercial FSRs with machine learning. The identified models did decrease in estimation performance over time but stayed on average 11.35% RMS and 8.6% MAE after a week with the Hammerstein-Wiener model seeming consistent between days two and seven. These results show promise for using 3D-printed soft piezoresistive foam-like sensors with system identification to be a viable approach for applications that require softness, lightweight, and customization such as wearable (force) sensors.
Read more5/24/2024