BeadSight: An Inexpensive Tactile Sensor Using Hydro-Gel Beads

0
🔍
Sign in to get full access
Overview
- Introduces a new approach to visuo-tactile sensing for robotic manipulation
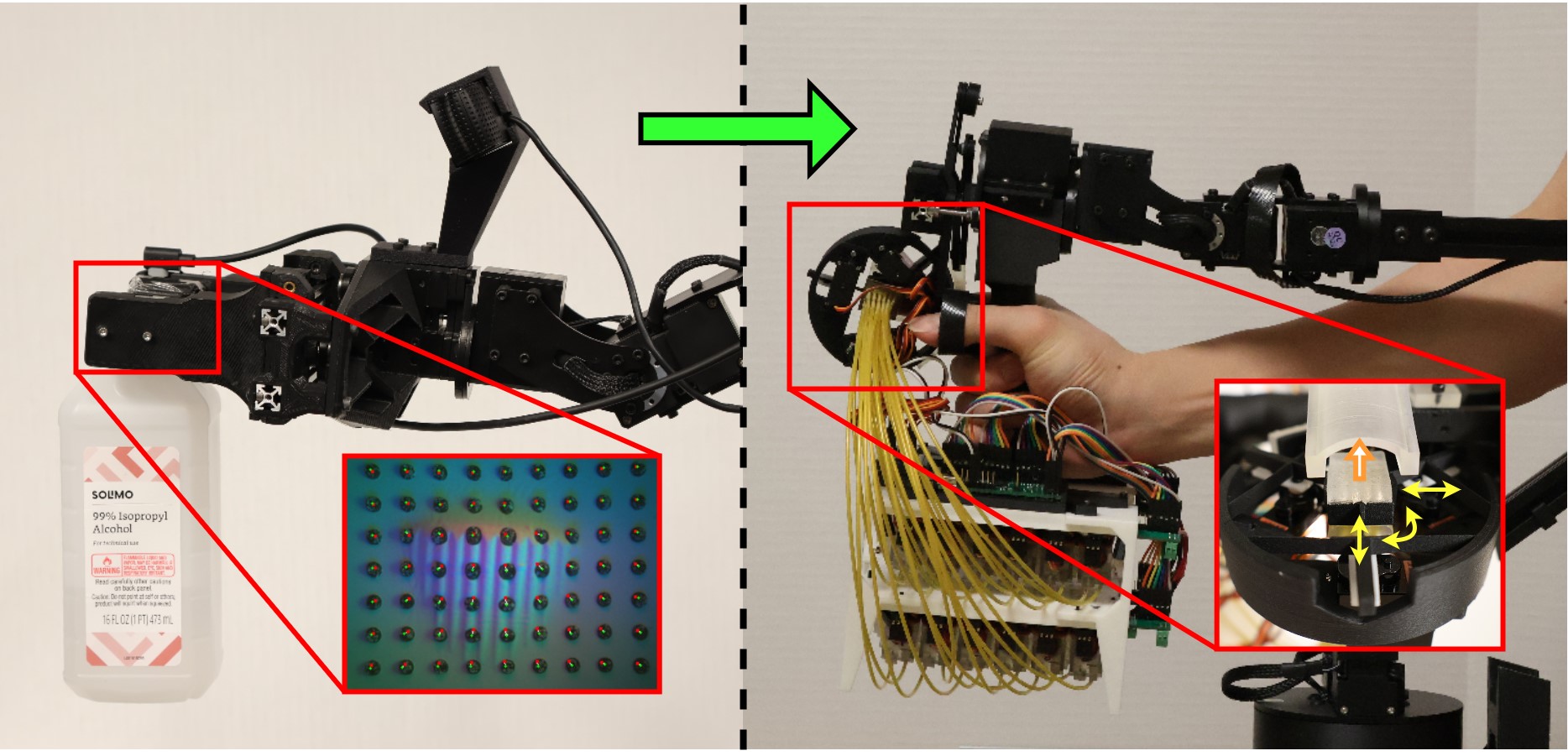
- Proposes a sensor called "BeadSight" that uses hydro-gel beads in a vinyl bag as a low-cost, replaceable sensing medium
- The sensor detects surface deformation of the bead bag and uses a neural network to predict the pressure maps, enabling detection of force location and magnitude
Plain English Explanation
Robots often need to interact with soft, variable, or hidden objects, which requires sensitive tactile feedback. Traditional tactile sensors can be expensive and fragile, limiting their usefulness.
To address this, the researchers developed BeadSight, a new type of tactile sensor. BeadSight uses a bag filled with small, water-based gel beads. When the bag touches a surface, the beads deform, and a camera behind the bag can observe this deformation. A neural network then analyzes the deformation patterns to estimate the forces and pressure being applied to the surface.
This approach has several advantages. The bead-filled bag is inexpensive and can be easily replaced if damaged. The camera-based sensing is also robust and durable compared to traditional tactile sensors. Together, these features make BeadSight an appealing option for many robotic applications that require sensitive touch feedback, such as handling delicate objects or detecting slippage.
Technical Explanation
The key innovation of BeadSight is the use of hydro-gel beads encased in a vinyl bag as the sensing medium. When the bag makes contact with a surface, the deformation of the beads is observed by a camera mounted behind the bag. This visual data is then passed through a U-Net convolutional neural network, which predicts a pressure map - indicating the location and magnitude of the forces acting on the surface of the bead bag.
The researchers tested BeadSight by applying known forces to the sensor and comparing the predicted pressure maps to the ground truth. Their results show that BeadSight can accurately detect the position and intensity of applied forces, performing comparably to other advanced tactile sensing approaches.
Critical Analysis
The paper provides a solid technical foundation for the BeadSight sensor and demonstrates its effectiveness through rigorous testing. However, the researchers acknowledge some limitations:
- The sensor has not been tested in more complex, real-world robotic manipulation tasks. Its performance in such scenarios remains to be seen.
- The neural network model used for pressure mapping was trained on a limited dataset and may require further refinement to generalize to a wider range of surfaces and objects.
- While the bead-filled bag is inexpensive, the camera and computing hardware required for the system add some cost that may limit its accessibility for certain applications.
Additionally, one could question whether the reliance on computer vision limits the sensor's potential for integration with soft, deformable robotic hands. Further research may be needed to explore more direct tactile sensing approaches that could better capture the nuances of touch in such scenarios.
Conclusion
The BeadSight sensor represents an innovative approach to visuo-tactile sensing for robotic manipulation. By leveraging inexpensive, replaceable materials and advanced neural network techniques, the researchers have developed a tactile sensing solution that is both cost-effective and capable of providing detailed force feedback.
While further refinement and real-world testing may be needed, the core concepts behind BeadSight suggest it could be a valuable tool for enabling robots to interact with a wide range of objects, particularly those that are soft, variable in size, or obscured from direct line of sight. As robots continue to play an increasingly important role in our lives, tactile sensing technologies like BeadSight may help expand the boundaries of what robots can safely and reliably manipulate.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
0
BeadSight: An Inexpensive Tactile Sensor Using Hydro-Gel Beads
Abraham George, Yibo Chen, Atharva Dikshit, Peter Pak, Amir Barati Farimani
In robotic manipulation, tactile sensors are indispensable, especially when dealing with soft objects, objects of varying dimensions, or those out of the robot's direct line of sight. Traditional tactile sensors often grapple with challenges related to cost and durability. To address these issues, our study introduces a novel approach to visuo-tactile sensing with an emphasis on economy and replacablity. Our proposed sensor, BeadSight, uses hydro-gel beads encased in a vinyl bag as an economical, easily replaceable sensing medium. When the sensor makes contact with a surface, the deformation of the hydrogel beads is observed using a rear camera. This observation is then passed through a U-net Neural Network to predict the forces acting on the surface of the bead bag, in the form of a pressure map. Our results show that the sensor can accurately predict these pressure maps, detecting the location and magnitude of forces applied to the surface. These abilities make BeadSight an effective, inexpensive, and easily replaceable tactile sensor, ideal for many robotics applications.
Read more5/24/2024

0
Low Fidelity Visuo-Tactile Pretraining Improves Vision-Only Manipulation Performance
Selam Gano, Abraham George, Amir Barati Farimani
Tactile perception is a critical component of solving real-world manipulation tasks, but tactile sensors for manipulation have barriers to use such as fragility and cost. In this work, we engage a robust, low-cost tactile sensor, BeadSight, as an alternative to precise pre-calibrated sensors for a pretraining approach to manipulation. We show that tactile pretraining, even with a low-fidelity sensor as BeadSight, can improve an imitation learning agent's performance on complex manipulation tasks. We demonstrate this method against a baseline USB cable plugging task, previously achieved with a much higher precision GelSight sensor as the tactile input to pretraining. Our best BeadSight pretrained visuo-tactile agent completed the task with 70% accuracy compared to 85% for the best GelSight pretrained visuo-tactile agent, with vision-only inference for both.
Read more6/26/2024
0
Feelit: Combining Compliant Shape Displays with Vision-Based Tactile Sensors for Real-Time Teletaction
Oscar Yu, Yu She
Teletaction, the transmission of tactile feedback or touch, is a crucial aspect in the field of teleoperation. High-quality teletaction feedback allows users to remotely manipulate objects and increase the quality of the human-machine interface between the operator and the robot, making complex manipulation tasks possible. Advances in the field of teletaction for teleoperation however, have yet to make full use of the high-resolution 3D data provided by modern vision-based tactile sensors. Existing solutions for teletaction lack in one or more areas of form or function, such as fidelity or hardware footprint. In this paper, we showcase our design for a low-cost teletaction device that can utilize real-time high-resolution tactile information from vision-based tactile sensors, through both physical 3D surface reconstruction and shear displacement. We present our device, the Feelit, which uses a combination of a pin-based shape display and compliant mechanisms to accomplish this task. The pin-based shape display utilizes an array of 24 servomotors with miniature Bowden cables, giving the device a resolution of 6x4 pins in a 15x10 mm display footprint. Each pin can actuate up to 3 mm in 200 ms, while providing 80 N of force and 1.5 um of depth resolution. Shear displacement and rotation is achieved using a compliant mechanism design, allowing a minimum of 1 mm displacement laterally and 10 degrees of rotation. This real-time 3D tactile reconstruction is achieved with the use of a vision-based tactile sensor, the GelSight [1], along with an algorithm that samples the depth data and marker tracking to generate actuator commands. Through a series of experiments including shape recognition and relative weight identification, we show that our device has the potential to expand teletaction capabilities in the teleoperation space.
Read more8/29/2024
🎲
0
Gel-OPTOFORT Sensor: Multi-axis Force/Torque Measurement and Geometry Observation Using GelSight and Optoelectronic Sensor Technology
Yohan Noh, Harshal Upare, Dalia Osman, Wanlin Li
Although conventional GelSight-based tactile and force/torque sensors excel in detecting objects' geometry and texture information while simultaneously sensing multi-axis forces, their performance is limited by the camera's lower frame rates and the inherent properties of the elastomer. These limitations restrict their ability to measure higher force ranges at high sampling frequencies. Besides, due to the coupling of the Gelsight sensor unit and multi-axis force/torque unit structurally, the force/torque measurement ranges of the Gelsight-based force/torque sensors are not adjustable. To address these weaknesses, this paper proposes the GEL-OPTOFORT sensor that combines a GelSight sensor and an optoelectronic sensor-based force/torque sensor.
Read more7/24/2024